

Зміст
Вступ 3
Розділ 1. Структурний аналіз важільного механізму
Розділ 2. Кінематичне дослідження важільного механізму.
Розділ 3. Кінетостатичне дослідження важільного механізму.
Розділ 4. Визначення моменту інерції маховика.
Розділ 5. Побудова картини евольвентного зчеплення і проектування кінематичної схеми планетарного редуктора.
Розділ 6. Синтез кулачкового механізму.
Вступ
У машинобудуванні для виконання у деталях різноманітних пазів, нарізування внутрішніх зубчастих коліс, використовується довбальний верстат(рис.1). Ним обробляють важко доступні зовнішні і внутрішні поверхні, також пази і канавки будь-якого профілю. Основою верстата є кривошипно-кулісний O1AB і кривошипно-повзунний BCD механізми. Інструмент(різець, довбач), що закріплюється на повзуні здійснює зворотно-поступальні рухи(робочий хід різання металу і холостий хід – повернення у вихідне положення). Маховик встановлений на валу O1.
Курсовий проект з ТММ складається із розрахунково-пояснювальної записки та графічної частини.
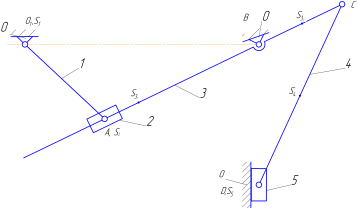
Рис.1
Розділ 1
Структурний
аналіз важільного механізму
 Рис.1.1
Схема важільного механізму.
Рис.1.1
Схема важільного механізму.
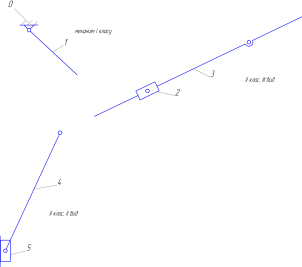
Рис. 1.2 Розбиття механізму на структурні групи
Кількість рухомих ланок – n=5.
Кількість кінематичних пар п'ятого класу - p5=7:
обертальні – (0-1), (1-2), (3-0), (3-4),(4-5),
поступальні – (2-3), (0-5).
Ступінь вільності механізму за формулою Чебишева:
W= 3∙n-2∙p5-p4 = 3∙5-2∙7-0=1
Розкладання механізму приведено на рис.1.2.
По-перше, відокремлюємо механізм класу. По-друге, відокремлюємо ланцюг який складається з двох ланок 2,3, що утворюють групу класу виду. По-третє, відокремлюємо ланцюг, що складається з ланок 4,5, що утворюють групу класу виду.
Даний механізм є механізмом II класу, оскільки найвищий клас структурної групи, другий.
Формула будови механізму:

Розділ 2
Кінематичне дослідження важільного механізму
2.1 Побудова планів положень механізму
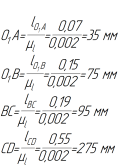
Визначаємо масштаб побудови:

Визначаємо довжини всіх інших відрізків, які відображають відповідні розміри ланок механізму на плані положень:
Будуємо 12 положень важільного механізму. Для цього розділимо коло, що є траєкторією точки A, на 12 рівних частин (аркуш 1). Положення точки A позначаємо 0(12), 1,2,... 11 у напряму обертання короба.
2.2 Побудова планів швидкостей
Розглянемо побудову плану швидкостей на прикладі 3 положення.
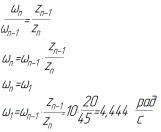
Визначаю кутову швидкість ведучої ланки,1:
Визначаю лінійну швидкість точки А короба:
Приймаємо довжину відрізка який буде відображати вектор швидкості точки A, pVa = 40 мм.
Визначаю масштаб плану швидкостей:

З полюса pV (див. аркуш 1) плану швидкостей за напрямом обертання короба перпендикулярно O1A відкладаємо відрізок pva1.
Швидкість точки B шатуна складається з швидкості полюса VA та швидкості руху навколо полюса VAB:
VB=VA+VAB
З точки a1 відкладаємо напрям вектора VAB шатуна AB паралельно до відрізка AB.З точки pV проводимо промінь, який перпендикулярний BA та відображає напрямок вектора швидкості VB коромисла. На перетині проведених ліній отримаємо точку a3 плану швидкостей Відстань pVs1a3=37,81 мм. Знаходимо точки m, c пропорційно:
Шатун CD здійснює плоский рух, тому його швидкість складається з швидкості полюса VC та швидкості руху навколо полюса VCD:
VD=VC+VCD
З точки pV проводимо вертикальний промінь, що відображає напрямок вектора швидкості VD повзуна. З точки c відкладаємо напрям вектора VCD
шатуна CD перпендикулярно до відрізка CD. На перетині проведених ліній отримаємо точку d плану швидкостей. Визначимо швидкості точок ланок механізму з плану швидкостей:
Для визначення швидкостей центрів мас шатунів S31, S32 і S4 зобразимо точки,як середини відрізків am, ac і cd. З’єднавши точки S31, S32 і S4 з полюсом плану швидкостей, отримаємо відрізки, які відображають модулі швидкостей центрів мас. Знайдемо відповідні значення швидкостей:

Значення кутових швидкостей шатунів BC і CD знаходимо за формулами:
Плани швидкостей для інших положень механізму будуємо аналогічно. Отримані значення відрізків, які зображають вектори швидкостей наведені в таблиці 2.3. Значення швидкостей наведені у таблиці 2.4.
Таблиця 2.3
|
Позначення, мм
|
Положення механізму |
||||||||||||
|
0,12 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
7' |
8 |
9 |
10 |
11 |
|
|
pVa1=pVs2 |
40 |
40 |
40 |
40 |
40 |
40 |
40 |
40 |
40 |
100 |
40 |
40 |
40 |
|
pVa3 |
0 |
18,03 |
30,53 |
37,81 |
39,99 |
37,07 |
29,03 |
15,77 |
0 |
99,7 |
26,68 |
39,9 |
23,22 |
|
pVm |
0 |
30,21 |
43,73 |
49,61 |
49,7 |
49,08 |
42,35 |
27,2 |
0 |
17,19 |
79,9 |
140,17 |
66,59 |
|
pVc |
0 |
20,4 |
29,52 |
33,5 |
33,62 |
33,13 |
28,59 |
18,37 |
0 |
11,61 |
53,95 |
94,64 |
44,96 |
|
pVd=pVs5 |
0 |
15,74 |
25,04 |
30,89 |
33,68 |
34,72 |
30,25 |
19,18 |
0 |
12,01 |
57,01 |
93,43 |
35,83 |
|
pVcd |
0 |
8,95 |
9,43 |
5,56 |
0,18 |
6,18 |
9,71 |
8,29 |
0 |
5,67 |
19,83 |
3,35 |
18,03 |
|
pVs31 |
0 |
15,1 |
21,86 |
24,8 |
24,85 |
24,54 |
21,18 |
13,6 |
0 |
8,59 |
39,95 |
70,08 |
33,29 |
|
pVs32 |
0 |
10,2 |
14,76 |
16,75 |
16,75 |
16,57 |
12,29 |
9,18 |
0 |
5,8 |
26,97 |
47,32 |
22,48 |
|
pVs4 |
0 |
17,66 |
26,96 |
32,1 |
33,65 |
33,79 |
29,07 |
18,32 |
0 |
11,47 |
54,61 |
94,02 |
39,64 |
|
pVa1a3 |
0 |
35,7 |
25,85 |
13,06 |
1,04 |
15,04 |
27,51 |
36,76 |
0 |
99,7 |
29,8 |
2,85 |
32,57 |
Результати планів швидкостей
Таблиця 2.4
Швидкості точок ланок механізму
|
Позначення |
Положення механізму |
||||||||||||
|
0,12 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
7' |
8 |
9 |
10 |
11 |
|
|
VM, м/с |
0 |
0,235 |
0,340 |
0,386 |
0,387 |
0,382 |
0,329 |
0,212 |
0 |
0,134 |
0,622 |
1,091 |
0,518 |
|
VC, м/с |
0 |
0,159 |
0,230 |
0,261 |
0,262 |
0,258 |
0,222 |
0,143 |
0 |
0,090 |
0,420 |
0,736 |
0,350 |
|
VD=VS5,м/с |
0 |
0,122 |
0,195 |
0,240 |
0,263 |
0,270 |
0,235 |
0,149 |
0 |
0,093 |
0,444 |
0,727 |
0,279 |
|
VCD, м/с |
0 |
0,07 |
0,073 |
0,043 |
0,001 |
0,048 |
0,076 |
0,064 |
0 |
0,044 |
0,154 |
0,026 |
0,140 |
|
VS31, м/с |
0 |
0,117 |
0,170 |
0,193 |
0,193 |
0,191 |
0,165 |
0,106 |
0 |
0,067 |
0,311 |
0,545 |
0,259 |
|
VS32, м/с |
0 |
0,079 |
0,115 |
0,130 |
0,130 |
0,129 |
0,096 |
0,071 |
0 |
0,045 |
0,210 |
0,368 |
0,175 |
|
VS4, м/с |
0 |
0,137 |
0,210 |
0,250 |
0,262 |
0,263 |
0,226 |
0,143 |
0 |
0,089 |
0,425 |
0,731 |
0,308 |
|
VA1A3, м/с |
0 |
0,277 |
0,201 |
0,102 |
0,008 |
0,117 |
0,214 |
0,286 |
0 |
0,776 |
0,232 |
0,022 |
0,253 |
|
VA1=VS2,м/с |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
0,311 |
|
1, рад/с |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
4,44 |
|
3, рад/с |
0 |
0,835 |
1,209 |
1,372 |
1,377 |
1,357 |
1,171 |
0,752 |
0 |
0,475 |
2,209 |
3,875 |
1,841 |
|
4, рад/с |
0 |
0,127 |
0,133 |
0,079 |
0,003 |
0,087 |
0,137 |
0,117 |
0 |
0,080 |
0,281 |
0,047 |
0,255 |