


1 МОДЕЛИРОВАНИЕ НА МИКРО УРОВНЕ
1.1 Струнный датчик натяжения: принцип работы и конструкция
Струнные датчики в настоящее время используются в океанографических исследованиях, а также для измерения напряжений в стали и бетоне, углов поворта и моментов вращения, дилатометрических измерений температуры. Разработанный нами датчик натяжения на основе вибрирующей струны применялся в качестве измерителя силы в термовесах а также при изучении взаимодействия образца с магнитным полем.
Внешний вид датчика показан на рисунке 1, конструкция схематически изображена на рисунке 2.
Рисунок 1 – Внешний вид струнного датчика натяжения
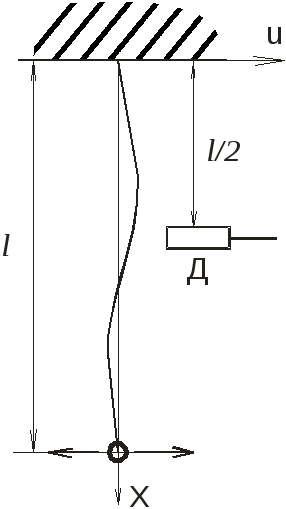
Рисунок 2 – Конструкция струнного датчика
Основной элемент струнного датчика – колеблющаяся струна длиной l, один конец которой закреплен, на другой действуют колебания с частотой n и амплитудой А. На расстоянии l/2 от конца струны находится датчик перемещений (Д) в перпендикулярном направлении.
1.2 Выбор уравнения и его идентификация
Система с распределенными параметрами (СРП) – это система, в которой практически все сигналы (особенно входной и выходной) зависят от пространственных координат и времени.
Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.).
Система с сосредоточенными параметрами является частным случаем СРП и вводится для упрощения и решения задач на первом (нулевом) этапе.
Функция состояния
Q(x,t)
объекта СРП (ОРП), определяемая по
пространственной переменной
![]() замкнутой области
замкнутой области
![]() удовлетворяет
уравнению:
удовлетворяет
уравнению:
![]()
![]()
![]() (1)
(1)
где
![]() - открытая часть области D, не содержащая
границы;
- открытая часть области D, не содержащая
границы;
L – некоторый заданный оператор (линейная функция Q, в частных производных Q(x,t) различных порядков, интегральный оператор от Q(x,t) и/или x, t).
Конечной задачей решения уравнения СРП является нахождение величины переменной состояния ОРП Q(x,t) в любой момент времени (t>0) в точке X.
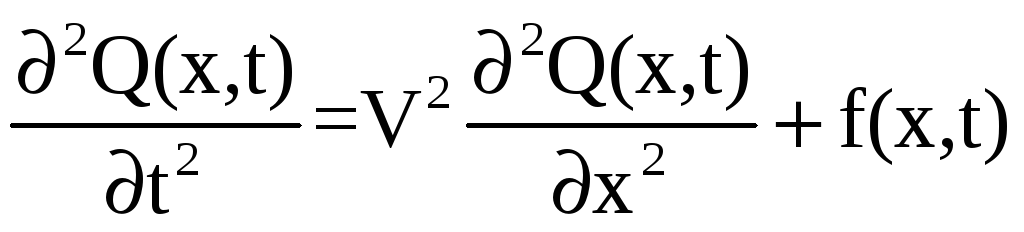
Механические колебания струны описываются волновым уравнением, моделирующим процессы распространения свободных колебаний:
 ;
;
![]() ;
;
![]() ;
;
![]() ,
(2)
,
(2)
где x – единственная координата, измеряемая вдоль перемещения колебаний, м;
Q(x,t) – отклонение струны от установившегося состояния, м;
V – скорость распространения волны, м/с;
f(x,t) – удельная сила, действующая на струну в процессе колебаний, Н/кг;
x0 и x1 – начальная и конечная координаты струны, м.
Примем координату верхнего конца x0=0, и будем считать, что в процессе колебаний на струну не действуют силы: f(x,t)=0.
Скорость распространения волны определяется выражением:
 , (3)
, (3)
где T – сила натяжения струны, Н (примем T=1H);
![]() - линейная плотность
массы, то есть масса, приходящаяся на
единицу длины струны, кг/м.
- линейная плотность
массы, то есть масса, приходящаяся на
единицу длины струны, кг/м.
Будем считать струну цилиндром, тогда линейная плотность рассчитывается по формуле:
![]() , (4)
, (4)
где
![]() - объемная плотность вольфрама, кг/м3
(
- объемная плотность вольфрама, кг/м3
(![]() =19*103
кг/м3);
=19*103
кг/м3);
d – диаметр струны, м (d=10-4м);
Подставив значения, получаем значение скорости: V=81.861м/с.
Для того, чтобы Q(x,t) было однозначно определено в любой точке струны и в любой момент времени, необходимо задать граничные условия на концах струны и начальные условия в момент времени t=0.
Определим граничные условия на концах струны длиной l=0.05м. Один конец жестко закреплен, а другой колеблется по заданному закону входного воздействия:
![]() =
= ,
t>0 (5)
,
t>0 (5)
Начальные условия нулевые – в начальный момент времени струна покоится:
N[Q(x,t)]=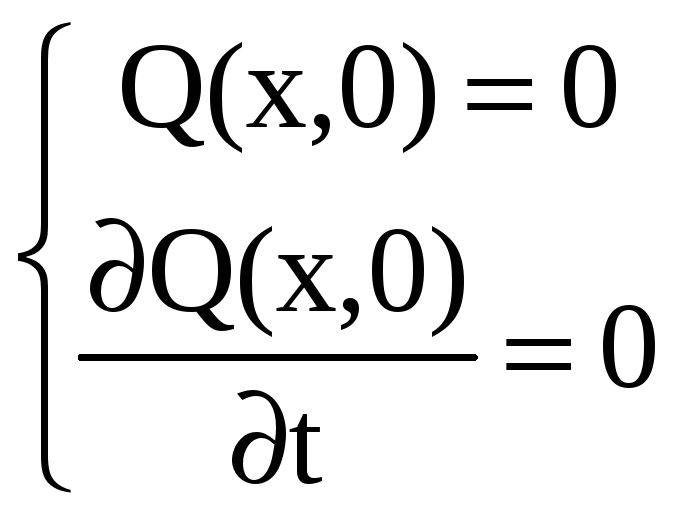 ,
,
![]() (6)
(6)
1.3 Расчет статической характеристики
Уравнение вида (1) с начальными и граничными условиями практически не разрешимо. Для его решения вводится в рассмотрение так называемая стандартная форма записи. Она подразумевает нулевые граничные и начальные условия.
 (7)
(7)
где (x, t) – стандартизующая функция.
Функцией, описывающей
реакцию самой системы, является функция
Грина
![]() .
Функцией Грина называется функция
источника, которая равна выходному
сигналу:
.
Функцией Грина называется функция
источника, которая равна выходному
сигналу:
![]() ,
при
,
при
![]() , (8)
, (8)
где
![]() - пространственная
- функция.
- пространственная
- функция.
![]() -
- функция по времени;
-
- функция по времени;
– координаты входного возмущения;
x - координаты точки отклика от удара.
Зная стандартизирующую функцию и функцию Грина, можно найти выходную функцию по следующему выражению:
 (9)
(9)
Запишем
стандартизирующую функцию
![]() и функцию Грина G(
и функцию Грина G(![]() )
на основании выбранного уравнения,
начальных условий и входного воздействия
по справочным материалам [1]:
)
на основании выбранного уравнения,
начальных условий и входного воздействия
по справочным материалам [1]:
![]() ,
,
![]() ,
t>0 (10)
,
t>0 (10)
G(![]() )=
)= (11)
(11)
Выходная величина
Q(x,t)
находится как пространственно временная
композиция от произведения функции
Грина G(![]() )
на стандартизирующую функцию
)
на стандартизирующую функцию
![]() :
:
 (12)
(12)
Подставим функцию Грина и вынесем сумму из-под интегралов:
 (13)
(13)
Подставим
стандартизирующую функцию
![]() :
:
 (14)
(14)
Вынесем из-под
пространственного интеграла члены, не
зависящие от
![]() :
:
 (15)
(15)
Используя свойство
![]() -функции
-функции
 ,
запишем:
,
запишем:


 (16)
(16)
Выражение (16) является выходной функцией и статической характеристикой колебаний струны.
Для построения статической характеристики воспользуемся программой MathCad:

В итоге получаем график для значений А=0,002м, n=2500Гц, представленный на рисунке 3.
, м
, м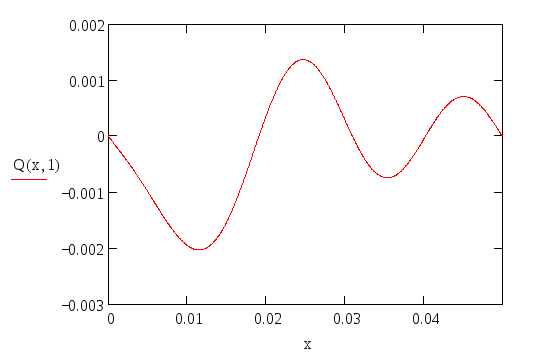


Рисунок 3 – Статическая характеристика датчика