

курсовая работа / Емкостной датчик / KursovikSRP / курсовикСРП
.doc 
ВВЕДИНИЕ
Моделирование – процесс замещения объекта исследования некоторой его моделью и проведение исследований на этой модели с целью получения необходимой информации об исследуемом объекте.
Различают два типа моделирования: предметное и абстрактное.
При первом способе моделирования строят физическую модель, соответствующим образом отражающую основные физический свойства и характеристики моделируемого объекта. При этом модель может иметь другую физическую природу, по сравнению с реальным объектом.
При абстрактном моделировании используют множество видов математических моделей, представляющие собой совокупность математических объектов и отношений между ними, адекватно отражающих физические свойства создаваемого технического объекта. В общем случае уравнение математической модели связывает физические величины, характеризующие состояние объекта.
Модель – физический или абстрактный образ моделируемого объекта, удобный для проведения исследований и позволяющий адекватно отображать интересующие физические свойства и характеристики моделируемого объекта.
Процесс моделирования включает в себя несколько этапов:
-
постановка задачи и определение свойств реального объекта, подлежащего исследованию;
-
констатация затруднительности или невозможности реального объекта;
-
выбор модели, хорошо описывающей основные свойства объекта, с одной стороны, и легко поддающаяся исследованию, с другой;
-
исследование модели в соответствии с поставленной целью;
-
проверка адекватности объекта и модели; если соответствий нет, то необходимо повторить п. а – г.
1 ИСХОДНЫЕ ДАННЫЕ
Рассчитать изменение сопротивления медного проводника ТСМ50. Идентифицировать тип дифференциального уравнения. По заданному дифференциальному уравнению получить выражение для передаточной функции в распределенных параметрах, выражение для выходной величины. Построить статическую характеристику выходной величины, а также логарифмические характеристики.
Исходные данные:
![]()
![]()
![]()
![]()
![]()
![]()
![]()

2 ОСНОВНЫЕ ПОНЯТИЯ СРП
Первый этап в развитии ТАУ связан с управляемыми системами состояния, которые характеризуется поведением во времени t некоторого набора функций одной переменой t конечного числа n:
![]() (1)
(1)
Подобные системы обычно описываются обыкновенными дифференциальными уравнениями или системами дифференциальных уравнений относительно g(t) и называются системами с сосредоточенными параметрами. Модели большого числа объектов управления могут быть с достаточной для практической точности точностью ССП. По практике любой технический объект имеет вполне определенные геометрические размеры, поэтому функция характеризующая ее состояние изменяется в пределах пространственной области и следовательно зависит не только от времени, но и от пространственных координат.
Такие системы называются системы с распределенными параметрами. Состояние СРП описывается дифференциальным уравнением с частыми производными, интегральными уравнениями, а также гибридными. Функция состояния Q(x,t) определенная на пространственной области Д удовлетворяет уравнению:
L[Q(x,t)]=f(x,t)
![]() ,
t>0
(2)
,
t>0
(2)
где Д- открытая часть области Д не содержащая границы;
L- некоторый заданный оператор(функция в частных производных);
f(x,t)- известная функция характеризующая внешнее воздействие на процесс.
Если
![]() ,
то (2) – однородное уравнение,
,
то (2) – однородное уравнение,
![]() ,
то (2)- неоднородное уравнение.
,
то (2)- неоднородное уравнение.
Если g(x,t)-
векторная функция состояния
![]() ,
то (2)-представляет собой систему
уравнений.
,
то (2)-представляет собой систему
уравнений.
Для получения единственного решения уравнения (2) необходимо дополнить начальными условиями, которые описываются некоторым линейным оператором
N[Q(x,t)]=Q(x,t)
![]() ,
t=0
(3)
,
t=0
(3)
Полная система уравнений должна содержать граничные условия от Q(x,t) которые характеризуют взаимодействие Q(x,t) с внешней средой должно выполнятся условие t>0 на границе области Д.
![]() (4)
(4)
где Г- линейный оператор;
![]() -
внешние воздействие, которое можно
рассматривать как второй вход объекта
наряду с
-
внешние воздействие, которое можно
рассматривать как второй вход объекта
наряду с
![]() .
.
Если
![]() ,
то граничное условие однородное и
наоборот.
,
то граничное условие однородное и
наоборот.
Уравнения математической физики являются основой для построения математической модели элементов систем уравнений с распределенными параметрами. Для их практического применения основной сложностью является выбор уравнения, который могло бы с заданной точностью и степенью достоверности описать интересующий элемент системой управления.
Самостоятельно составлять и получать в частных производных является сложной задачей, поэтому используют следующий алгоритм:
1) Выбирается система координат исходя из конструкции элемента СУ.
-
Выбирается размерностьr пространственной области D определения функции Q данной задачи.
-
Наивысший порядок производных m функции Q по независимой временной производной t ограничивается двойной.
-
Наивысший порядок производных n функции Q по пространственным переменным ограничивается двойной.
-
Выбирается дифференциальное уравнение группы ( r, m, n) в нужной системе координат.
-
Уравнение «офизичивается», то есть производится конструирование размерностей. Это означает, что задается первичная размерность, либо входному возмущению f (x, y, z, t ), либо выходному сигналу Q (x, y, z, t ). В зависимости оттого, что интересует. Далее рассчитываются вторичные размерности исходя из конкретного вида уравнения и зависящая от первичных размерностей.
-
Находится выходной сигнал и производится его сопоставление с ожидаемыми результатами.
-
Если результат не устраивает, выбираем другое уравнение и повторяем все процедуры заново.
Во многих случаях для описания физических процессов используют уравнений с частыми производными до второго порядка включительно.
Так, например, процессы распространения тепловой энергии описывается уравнением теплопроводности
![]() ,
,
где
![]() и
С – плотность и теплоемкость вещества,
и
С – плотность и теплоемкость вещества,
Т- температура,
k- коэффициент теплопроводности,
Q – плотность источника тепла.
Анализ стационарных состояний, например, статических тепловых, электрических, магнитных полях проводят, используя уравнение Пуассона
![]()
где u(x, y, z) – функция, описывающая статическое поле,
f( x, y, z)- распределенные источники.
Несмотря на различие процессов, все они могут быть представлены как частные случаи обобщенной формы дифференциального уравнения второго порядка.
Рассмотрим уравнение второго порядка с двумя независимыми переменными x и y:
![]() (1)
(1)
где A,B,C,D- некоторые функции, зависящие в общем случае от x, y,u.
На основании того, что уравнение 1 можно поставить в квадратичную форму
![]() по
природе различают следующие типы
квазилинейных уравнений:
по
природе различают следующие типы
квазилинейных уравнений:
-
гиперболический, если В2-4АС>0- его аналогом является волновое уравнение;
-
параболический, В2-4АС=0-его аналог уравнение теплопроводности;
-
эллиптический, если В2-4АС<0- аналог уравнение Пуассона или Лапласа.
3 ИДЕНТИФИКАЦИЯ ТИПА ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ
ЗАДАНИЕ ВХОДНОГО И ВЫХОДНОГО ПАРАМЕТРОВ, НАЧАЛЬНЫХ И ГРАНИЧНЫХ УСЛОВИЙ
Так как данное дифференциальное уравнение содержит первую производную по времени, то оно относится к параболическому типу. Также это уравнение является неоднородным.
Выходным параметром Q(x,y,t) в данной системе является сопротивление медной проволоки.
Входным воздействием f(x,y,t) является поток тепла от корпуса термопреобразователя сопротивления ТСМ50.
![]()

Рисунок 1- Вид входного воздействия
Граничные условия:
![]()
![]()
Зададим размерность входного возмущения.
![]() ,
,
где F- количество теплоты (теплой поток)
V-объем.
![]() – удельная
теплоемкость меди.
– удельная
теплоемкость меди.
![]() -
плотность меди.
-
плотность меди.
![]() -коэффициент
теплопроводности,
-коэффициент
теплопроводности,
где
![]() -коэффициент
теплопроводности меди.
-коэффициент
теплопроводности меди.
Тогда а2 =0.884 м2/с.
Пусть l1 = 18 – длина проволоки.
Начальные условия:
![]() ,
что соответствует сопротивлению ТСМ50
до начала действия теплового потока.
,
что соответствует сопротивлению ТСМ50
до начала действия теплового потока.
Граничные условия:
![]() ,
что соответствует изменению сопротивления
в начале проволоки.
,
что соответствует изменению сопротивления
в начале проволоки.
![]() - что соответствует
изменению сопротивления на конце
проволоки.
- что соответствует
изменению сопротивления на конце
проволоки.
С учетом выше описанных условий стандартизирующая функция примет следующий вид:
![]()
4 РАСЧЕТ ВЫХОДНОЙ ВЕЛИЧИНЫ
Для определения вида статической характеристики воспользуемся функцией Грина:

Для этого первоначально произведем расчет выходной вылечены по формуле:


Ввиду явной неразрешимости интеграла, в котором присутствует сумма ряда до бесконечного члена, введем ограничение на количество рядов 1, т.е. возьмем первый член ряда. Эта мера является вынужденной и ведет к большой погрешности.
Таким образом, учитывая принятые меры, получим уравнение:

Используя свойства - функции для упрощения уравнения, построим статическую характеристику выходной величины при фиксированных значениях координаты и времени.

![]()
![]()

а
![]()
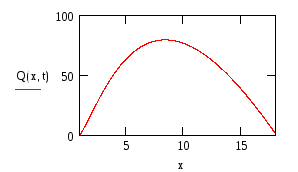
б
Рисунок – 2 Статическая характеристика выходного сигнала: а - при фиксированном значении координаты; : б - при фиксированном значении времени.
5. РАСЧЕТ ИНТЕГРАЛЬНОЙ ПЕРЕДАТОЧНОЙ ФУНКЦИИ.
ПОСТРОЕНИЕ ЛОГАРИФМИЧЕСКИХ ХАРАКТЕРИСТИК
Найдем изображение по Лапласу стандартизирующей функции.
![]()
![]()
Выделим в явном виде компоненту входной координаты.
![]()
Выражение для
![]() имеет следующий
вид:
имеет следующий
вид:
![]()
Интегральная передаточная функция определяется выражением


Проведя интегрирование и все преобразования, получим следующее выражение для интегральной передаточной функции:
![]()
Для построения ЛАЧХ в полученной интегральной передаточной функции заменим р на jω и затем воспользуемся формулой:
![]()
![]()
Выполним расчет и построение ЛАЧХ с помощью программы Matchcad 2000, задав произвольно необходимые параметры:
![]()
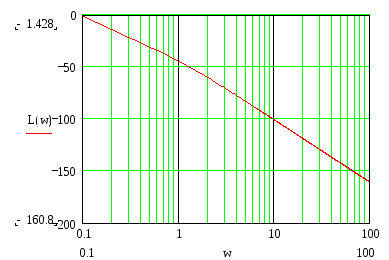
Рисунок 3- ЛАЧХ.
ЗАКЛЮЧЕНИЕ
В данной курсовой работе был произведен расчет системы с распределенными параметрами: изменение сопротивления медной проволоки по длине. В ходе расчетов было выявлено ниже следующее.
Система устойчива, имеет высокие качественные характеристики и достаточный коэффициент усиления. Данная система не требует дальнейшей доработки. Это означает, что были правильно подобраны начальные, граничные условия и дифференциальное уравнение для описания данной системы.
СПИСОК ЛИТЕРАТУРЫ
1. Тарасик В.П. Математическое моделирование технических систем: Учебник для вузов.-МН.: ДизайнПРО, 2004.
2. Бутковский А.Г. Характеристики систем с распределенными параметрами. – М.: Наука, 1979. –224с.
3. Арсенин В. Я. Математическая физика. – М. Наука, 1966.