

Вариант №18.
Цель выполнения курсовой работы: Освоение методов построения математических моделей элементов систем управления. Исследование свойств элементов методом математического моделирования.
Тема и состав курсовой работы: Построение и исследование математических моделей элементов систем управления. Курсовая работа включает три задания.
Задание 1. Построить математическую модель, временные и частотные характеристики заданного элемента. Провести моделирование прохождения через элемент различных сигналов во временной области.
-
1.2 Построить передаточную функцию по заданному каналу. Построить математическую модель элемента в виде дифференциального уравнения.

рисунок 1
Дано: R1=324 [Ом] R2=393 [Ом]
C=39697 [мкФ]
Комплексные сопротивления элементов электрической схемы:
Для сопротивления
R
![]()
Для ёмкости С
![]()

![]()
После преобразований получаем новую схему:

рисунок 2
Схема как делитель напряжения на сопротивлениях в операторном виде Z1 и Z2.
Выходное напряжение
 учитывая
учитывая
![]()
![]()
Передаточная
функция будет иметь вид:
![]()
Для схемы рисунка 1

![]()

Введем обозначения:
![]()
![]()
![]() ;
;
![]() ;
;
![]() ;
;
Тогда передаточная функция примет вид:
![]()
Из выражения передаточной функции получим дифференциальное уравнение:
![]()
![]()
![]()
Используя обратное преобразование Лапласа, запишем:
![]()
Рассчитаем коэффициенты передаточной функции:
![]()
![]() [с]
[с]
![]() [с]
[с]
Подставим рассчитанные коэффициенты в передаточную функцию:
![]()
1.3 Исследование временных характеристик элемента системы управления. По полученной в задании 1.2 передаточной функции найти выражения для весовой и переходной характеристик и построить их графики.
Операторный метод решения дифференциальных уравнений основан на использовании преобразования Лапласа, позволяющего преобразовать дифференциальное уравнение в алгебраическое, что упрощает их решение.
Последовательность нахождения реакции элементов систем управления на временной входной сигнал x(t):
-
нахождение преобразования Лапласа x(p) от входного сигнала x(t)
-
нахождение преобразования выходного сигнала y(p)=W(p)·x(p)
-
нахождение временного выходного сигнала y(t) путем обратного преобразования Лапласа выходного сигнала y(p)
Последовательность получения обратного преобразования Лапласа от y(p)=M(p)/N(p):
-
определяются корни характеристического уравнения выражения для y(p)
-
в зависимости от вида корней записывается выражение для выходной переменной y(t).
-
Построение весовой характеристики системы.
Изображение дельта-функции Дирака (входного сигнала для весовой функции) имеет вид:,
![]()
Изображение выходной величины:
![]()
![]()
Найдем обратное преобразование Лапласа от y(p). Для этого необходимо найти корни характеристического уравнения.
![]()
![]()
Т. к. корень простой (не комплексный), не нулевой, не кратный, то выражение для y(t) при t≥0 имеет вид:
Весовая характеристика будет иметь вид:
![]()
![]()
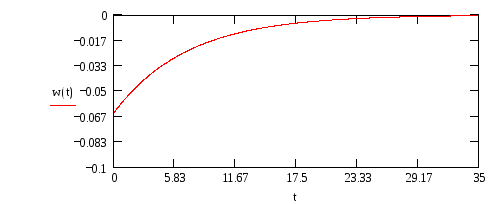
рис 3 «График весовой характеристики системы»
-
Построение переходной характеристики системы.
Изображение единичной функции Хевисайда (входного сигнала для переходной функции) имеет вид:
![]()
Изображение выходной величины:
![]()
![]()
Найдем обратное преобразование Лапласа от y(p). Для этого необходимо найти корни характеристического уравнения.
![]()
![]()
![]()
Т. к. корни простые (не комплексные), не кратные, и имеется один нулевой корень, то выражение для y(t) при t≥0 имеет вид:

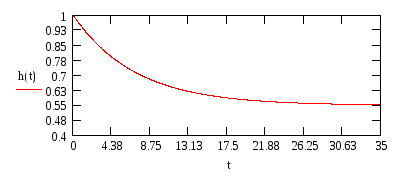
Переходная характеристика будет иметь вид:
![]()
Возьмём производную от переходной характеристики:

Полученное выражение совпадает с весовой характеристикой, следовательно, расчет выполнен правильно. Построим график переходной характеристики.
![]()
![]()
1.4 Используя символьные вычисления в MathCAD получим выражения и построим графики весовой и переходной характеристик. Полученные результаты сравним с результатами 1.3
Проверим правильность расчета весовой и переходной характеристик с помощью MathCAD.
![]()
![]()

Как видно из графика, найденные значения весовой и переходной характеристик верны.
-
Рассчитаем и построим графики амплитудно-частотной и
амплитудно-фазовой характеристик, логарифмических характеристик.
Последовательность нахождения частотных характеристик:
-
сделать замену в передаточной функции p = j·ω
-
освободиться от мнимых чисел в знаменателе путём умножения числителя и знаменателя выражения на комплексно сопряженное число знаменателю
-
раскрыть скобки и привести подобные члены, и разделить выражение в числителе на сумму вещественного и мнимого полиномов
-
записать выражение для амплитудно-частотной и фазо-частотной характеристик
-
записать выражение для логарифмической амплитудно-частотной характеристики
-
построить графики частотных характеристик.
![]()


![]()
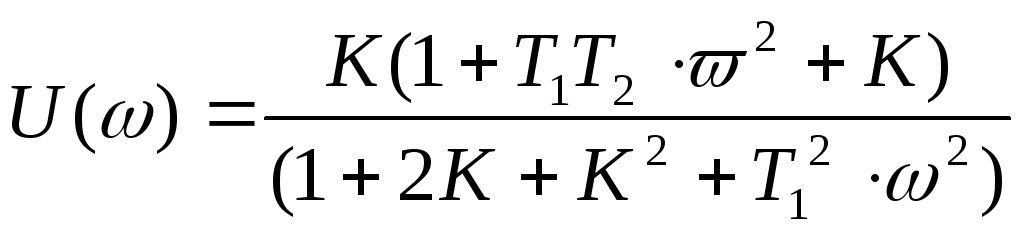
![]()
где U(ω) – вещественная частотная характеристика
V (ω) – мнимая частотная характеристика
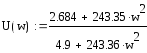
Подставим значения коэффициентов:
![]()
![]()
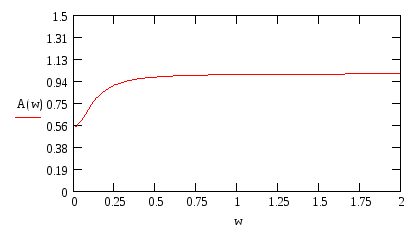
1) Построим амплитудно-частотную характеристику:
![]()
![]()
![]()

2) Построим фазо-частотную характеристику:
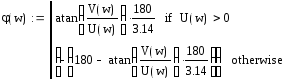

3) Построим логарифмическую амплитудно-частотную характеристику:
![]()
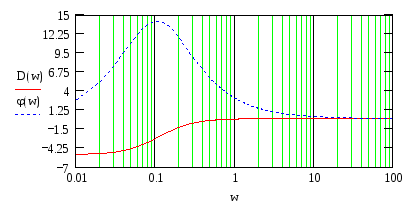
Проверим правильность расчетов частотных характеристик устройства с помощью MathCAD.
A1(w) - амплитудно-частотная характеристика
![]()
![]()
![]()
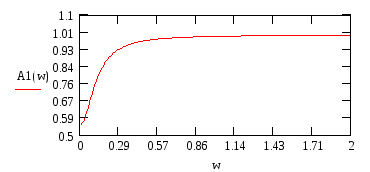
φ1(w) - фазо-частотная характеристика
![]()

D1 (w) - логарифмическая амплитудно-частотная характеристика.
![]()
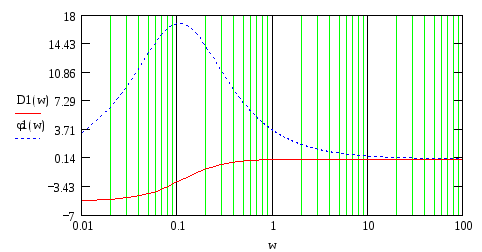
Проверка показала, что частотные характеристики построены, верно.
Задание 3. Математическое моделирование работы электропривода.
Постановка задачи:
Заданы параметры электрического привода с двигателем постоянного тока. Необходимо построить математическую модель электропривода при различных исходных данных.
Определение параметров математической модели электрического привода по паспортным данным двигателя и характеристикам нагрузки.