

курсовая работа / Даньшова / курсовая Мефёдова
.doc
ВВЕДЕНИЕ
Под моделированием понимается процесс замещения реального объекта некоторой моделью, позволяющей проводить над ней определенные исследования. В зависимости от уровня абстрагирования выделяют три иерархических уровня: микро-, макро- и мегауровень. Цель курсовой работы — моделирование некоторых физических процессов на микро- макроуровне.
Под моделированием на микроуровне понимается также теория систем с распределенными параметрами. Есть среды, которые не могут быть описаны в сосредоточенных параметрах (электромагнитное поле, электростатическое поле, течение потока, гравитационное поле, температура и т.д.). Система с распределенными параметрами (СРП) – это система, в которой практически все сигналы зависят от пространственных координат и времени. Математически СРП описываются дифференциальными уравнениями в частных производных с начальными и граничными условиями, составляющие краевую задачу. Для ее решения в статике и динамике используется функция Грина, являющаяся решением краевой задачи при входном воздействии в виде дельта-функции и нулевых начальных и граничных условиях, а также континуальная передаточная функция, являющаяся преобразованной по Лапласу функцией Грина. В данной работе, при моделировании на микроуровне решается вопрос построения математической модели мембраны, жестко закрепленной по краям.
На макроуровне исследуется гидравлическая система. При разработке и исследовании модели макроуровня необходимо выполнить: синтез моделей в графической и матричный формах, в виде системы обыкновенных дифференциальных уравнениях, а также анализ полученной математической модели в статическом и динамическом режиме.
1 МОДЕЛИРОВАНИЕ НА МИКРОУРОВНЕ
1.1 Выбор уравнения и его идентификация
Уравнения математической физики являются основой для построения математической модели элементов и систем управления с распределенными параметрами. Для их практического применения основной сложностью является выбор уравнения, которое могло бы заданной точностью и степенью достоверности описать интересующий элемент системы.
Рассмотрим процесс колебания струны под действием на нее давления.
Колебательные процессы описываются уравнениями гиперболического типа. Рассмотрим одномерную задачу: распространение колебаний по струне.
Выберем дифференциальное уравнение:
![]()
![]()
Н ачальные
условия:
ачальные
условия:
Q(x,0)=Q0(x)=kx , k=0.1
Q1(x)=0
Граничные условия ( с учетом, что один конец струны жестко закреплен):
![]() ;
;
![]()
0
< x
< 1,
![]() t
> 0, a
= 0, l
=0.3 м.- длина струны
t
> 0, a
= 0, l
=0.3 м.- длина струны
Входное воздействие:
f(x,t)=0
Коэффициент а
представляет собой отношение поверхностного
натяжения Т[Н/м![]() ]
]![]() к
плотности струны
к
плотности струны
![]() и имеет размерность а=[м/с]. В данной
работе принимаем а=1
м/с. Принимаем
и имеет размерность а=[м/с]. В данной
работе принимаем а=1
м/с. Принимаем
![]() [1/с].
[1/с].
Стандартизирующая
функция:
![]() =f(x,t)+Q
=f(x,t)+Q![]() (x)[
(x)[![]() ’(t)+2
’(t)+2![]()
![]() (t)]+Q
(t)]+Q![]() (x)
(x)![]() (t)+a
(t)+a![]()
![]() ’(x)g
’(x)g![]() (t)+
a
(t)+
a![]()
![]() ’(l-x)g
’(l-x)g![]() (t),
(t),
где Q0(t) – начальная функция, описывающая искомую функцию Q в начальный
момент времени,
Q![]() (t)
– производная от Q
(t)
– производная от Q![]() (t),
[м]
(t),
[м]
g(t) – граничные условия, [м/с]
![]() (t)
– импульсная
переменная функция, [с]
(t)
– импульсная
переменная функция, [с]
![]() ’(t)
– производная от
’(t)
– производная от
![]() (t)
– функции по времени.
(t)
– функции по времени.
Функция Грина:

Континуальная передаточная функция:

1.2 Расчет статической характеристики. Расчет функции распределения.
Зная стандартизирующую функцию и функцию Грина можно найти выходную функцию, вычислением интеграла, представляющий собой основное соотношение, связывающее выход объекта при заданном начальном состоянии с выходными воздействиями:
![]()
Для этого вычислим составляющие Q(x,t) по формуле:
Q(x,t)=Q1(x,t)+Q2(x,t)+Q3(x,t) ,
где

Получим:
Q(x,t)=Q1(x,t)+Q2(x,t)+Q3(x,t)
Q(x,t)=
![]()
![]()
![]()
Построим функцию отклонения струны для t=0.1 с. :
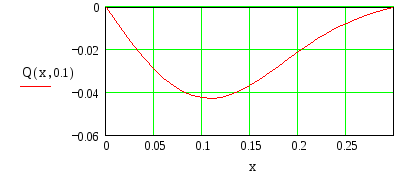
Рисунок 1 – Отклонение струны для t=0.1 с.
Построим функцию отклонения струны для t=1 с:

Рисунок 2 – Отклонение струны для t=1 с.
Построим функцию отклонения струны для t=3 с:
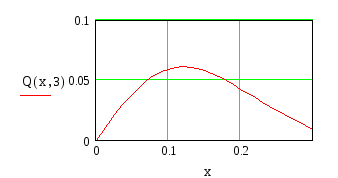
Рисунок 3 – Отклонение струны для t=3 с.
1.3 Расчет динамической характеристики.
Расчет интегральной передаточной функции. Преобразование Лапласа от интегральной передаточной функции. Построение переходного процесса и частотных характеристик. Получение передаточной функции.
По заданному дифференциальному уравнению объекта получим выражение для передаточной функции в распределенных параметрах. Построим ЛАЧХ, аппроксимируем ее с погрешностью 5% , запишем выражение передаточной функции через типовые звенья.
Для расчета необходимо найти преобразование по Лапласу стандартизирующей функции, которая имеет вид:
![]() =f(x,t)+Q
=f(x,t)+Q![]() (x)[
(x)[![]() ’(t)+2
’(t)+2![]()
![]() (t)]+Q
(t)]+Q![]() (x)
(x)![]() (t)+a
(t)+a![]()
![]() ’(x)g
’(x)g![]() (t)+
a
(t)+
a![]()
![]() ’(l-x)g
’(l-x)g![]() (t)
(t)
Преобразуя данное выражение, получим:

Изображение по Лапласу от нормирующей функции имеет вид:

Континуальная передаточная функция имеет вид:

Вычислим интегральную передаточную функцию по формуле:
Ws(x,p)=Ws1(x,p)+Ws2(x,p),
где
![]() ,
,
![]()
Получим:
Ws(x,p)=Ws1(x,p)+Ws2(x,p)
Ws(x,p)=
-5.0*10-5*![]()

![]()

![]()
![]()
![]()

![]()

![]()

Зафиксировав значения величины x=0.15 м, найдем выражение для интегральной передаточной функции:
W s(x,p)=1.0*10-23*
s(x,p)=1.0*10-23*![]()
![]()

![]()
![]()
В
выражении для интегральной передаточной
функции сделаем замену
![]()
Получим:

По полученной передаточной функции построим ЛАЧХ. Найдем выражение для логарифмической амплитудно-частотной характеристики:
![]()
Аппроксимируя ЛАЧХ стандартными наклонами получим -20 дб/дек,
0 дб/дек, и -40дб/дек. Такие наклоны соответствуют инерционному и апериодическому звеньям. Запишем передаточную функцию
По графику определяем, что ЛАЧХ пересекает ось у в точке -26, тогда имеем: k=10-26/20=0.05.
![]()
![]()
T1, T2 - постоянные времени, с.
Рисунок 4 – График логарифмической амплитудно-частотной характеристики.
|
|
|
|
|
|
УИТС.423311.214 ПЗ |
Лист |
|
|
|
|
|
|
|
|
|
Изм |
Лист |
№ докум |
Подп. |
Дата. |