

Введение
В настоящее время микропроцессоры применяются практически повсеместно – от бытового оборудования до суперкомпьютеров. Чрезвычайное расширение области применения привело к неизбежной их специализации, появлению наряду с универсальными процессорами микросхем (МС), предназначенных для решения задач определенного класса. Универсальные процессоры содержат устройства выполнения операций с плавающей запятой, управления памятью, кэш – память, устройство, реализующее магистраль процессора. Они обычно не содержат блоков для выполнения специальных функций.
В отличие от этих микросхем однокристальные микроконтроллеры имеют устройства, выполняющие различные периферийные функции, при этом на кристалле отсутствуют блоки выполнения операций с плавающей запятой и управления памятью. Разнообразие разработанных типов микроконтроллеров определяется системами команд, набором реализуемых на кристалле периферийных функций, производительностью.
Наиболее специализированы процессоры, предназначенные для решения задач цифровой обработки сигналов (Digital Signal Processor – DSP). Уникальная система команд, особенности архитектуры обеспечивают высокую производительность обработки аналоговых сигналов, представленных в цифровой форме в реальном времени.
Кроме центрального процессора на основе однокристального микропроцессора или микроконтроллера в систему обычно входят дополнительные элементы памяти, периферийные интерфейсные большие интегральные схемы (БИС) для сопряжения с датчиками и с объектом управления. Все задачи, решаемые системой встроенного управления, делятся на два больших класса: задачи управления событиями в реальном времени и управления потоками данных.
Каждый класс предъявляет специфические требования к микропроцессору или микроконтроллеру. Это находит отражение, прежде всего, в наборе функций, реализуемых на кристалле, и в системе команд.
К первому классу относят задачи, требующие быстрой реакции микропроцессорной системы на изменения внешних условий (на срабатывания датчиков, изменение параметров объекта управления). Для решения этих задач применяют микроконтроллеры с размещенными на кристалле памятью программ, памятью данных, устройствами ввода-вывода. Обычно для реализации алгоритмов требуется память программ небольшой емкости (до 32 Кб).
Второй класс составляют задачи, требующие быстрой обработки значительных объемов информации. Процессор при этом выполняет большое количество вычислительных операций, в том числе с плавающей запятой. Для решения таких задач применяются высокопроизводительные 32 - или 64 - разрядные процессоры.
Например, продукция фирмы Intel,ориентированная на встраиваемые системы управления, может быть представлена следующим образом. Для решения задач управления событиями в реальном времени используются однокристальные микроконтроллеры:
8-разрядные – MCSR-51, MCSR-251;
16-разрядные – MCSR-96, MCSR-196, MCSR‑296.
Целью настоящего курсового проекта является разработка микропроцессорной управляющей микроЭВМ на однокристальной СБИС К1816ВЕ51 (ОМЭВМ), реализующей заданные взаимодействия с объектом управления (ОУ), а также разрабатываются программные средства системы, обеспечивающие выполнение заданного алгоритма управления.
1 РАСШИФРОВКА И АНАЛИЗ ЗАДАНИЯ
1.1. Общая структура разрабатываемой микроЭВМ
Система проектируется на базе однокристальной микроЭВМ и включает в себя следующие основные устройства:
- процессорный модуль, в качестве которой используется ОМЭВМ К1816ВЕ51 (МК51);
- память, состоящую из оперативного запоминающего устройства (ОЗУ) и постоянного запоминающего устройства (ПЗУ): МС КР537РУ8 и МС К556РТ6 соответственно;
- устройства параллельного ввода-вывода для связи с ОУ;
- блок последовательного канала для связи с ЭВМ верхнего уровня;
- программируемый системный таймер;
- контроллер прерываний;
- контроллер прямого доступа в память;
- пульт управления.
Процессорный модуль включает в себя микропроцессор, и при необходимости, дополнительные БИС, обеспечивающие реализацию вспомогательных функций.
Устройства ввода для связи с ОУ должны обеспечить ввод в процессорный модуль значений x1, x2, x3 двоичных датчиков, а также 8-разрядных двоичных кодов NU1, NU2, NU3, принимаемых с выходов аналого-цифрового преобразователя (АЦП). Сигнал датчика аварийной ситуации xa воспринимается только подсистемой прерываний.
Устройства вывода на ОУ должны обеспечить выдачу двоичных управляющих воздействий y1, y2, y3 определенной длительности и кода управляющего напряжения Y4 – 8 – разрядного двоичного вектора на вход цифроаналогового преобразователя (ЦАП). В структуру ОУ входит устройство, принимающее массив данных из ПЗУ (ОЗУ) в режиме прямого доступа в память (ПДП). Запрос на ПДП возникает асинхронно по отношению к процедуре управления.
Пульт управления должен обеспечивать ввод в процессорный модуль значения 8 – разрядной двоичной константы К, ввод двоичного значения сигнала «СТОП», формирование сигнала начальной установки системы, вывод на светодиодную индикацию значений x1, x2, x3, y1, y2, y3, NU1, Y4.
Системны таймер должен обеспечить отсчет временных задержек, реализуемых при работе алгоритма управления.
Блок последовательного обмена предназначен для передачи на микроЭВМ верхнего уровня информации о состоянии процесса управления. По запросу со стороны микроЭВМ разрабатываемая управляющая микроЭВМ должна обеспечить выдачу по последовательному каналу кадра (прерывание INT3). Передача информации с верхнего уровня на нижний не предусмотрена.
Контроллер прерываний обеспечивает фиксацию запросов на прерывания от различных источников и дисциплину обслуживания запросов. В подсистеме векторного прерывания контроллер формирует код команды вызова, а при наличии в системе радиального входа запроса на прерывания – код состояния регистра
1.2 Реакция системы на внешние события
В системе необходимо предусмотреть следующие линии запроса на внешние прерывания:
INT0 - отказ источника питания;
INT1 - сигнал ха аварийного датчика ОУ;
INT2 - запрос от пульта управления (прерывание оператора);
INT3 - запрос от микроЭВМ верхнего уровня.
Запросы на прерывания приведены в порядке убывания приоритетов (INT0 - высший приоритет). Система должна реагировать на запросы следующим образом:
INT0 - вырабатывается сигнал установки системы в исходное состояние; выполняется команда СТОП.
INT1 - на пульте управления включается аварийная сигнализация (световая с частотой 2Гц или звуковая с частотой 500Гц); на индикацию пульта выдается состояние двоичных датчиков х1, х2, х3 и цифровой код NU1; выполняется команда СТОП.
INT2 - выдается на индикацию значения следующих булевых переменных: функция fl, результат сравнения NU<=Q, значение выражения xl & х2 & х3, значение выражения xl v x2 v x3; выдается на индикацию значение сохраняемой в ПЗУ константы Q; организуется выход из прерывания на начало цикла управления.
INT3 - выдать в последовательный канал следующую информацию:
- код символа '!' ("Внимание!");
- двухзначный номер абонента (номер студента в списке группы);
- максимальное значение Y4, вычисленное за период от предыдущего сеанса связи до текущего цикла управления;
- минимальное значение Y4 за тот же период;
- код символа '#' ("Конец передачи").
Кроме перечисленных, в системе могут использоваться прерывания от внешних устройств, обеспечивающих связь с ОУ.
2 РАЗРАБОТКА ПРОЦЕССОРНОГО МОДУЛЯ, ИНТЕРФЕЙСА И УПРОЩЕННОЙ СТРУКТУРНОЙ СХЕМЫ
2.1 Архитектура однокристальной микроЭВМ К1816ВЕ51
2.1.1 Организация архитектуры К1816ВЕ51. Микросхема К1816ВЕ51 представляет собой СБИС семейства высокопроизводительных однокристальных микроЭВМ соответственно со встроенной постоянной памятью программ. Она предназначена для использования в системах обработки информации в качестве высокопроизводительных контроллеров и управляющих устройств в изделиях самого широкого применения.
Система команд ОМЭВМ содержит 111 базовых команд с форматом 1, 2, 3 байта. В составе микросхема МК51 имеет:
- 8-ми битовый канал данных с возможностью обработки следующих форматов данных: бит, байт, два байта;
- внутренюю память данных емкостью 128 байт;
- внутренюю память емкостью 8 Кбайт;
- 32 РОН;
- четыре способа адресации данных (прямая побайтовая и побайтная, косвенная, непосредственная, регистровая);
- пять векторов прерывания;
- 2 уровня прерывания;
- четыре 8-ми разрядных программируемых канала ввода/вывода;
- последовательный канал ввода/вывода;
- 128 определяемых пользователем программно управляемых флага;
- два 16-битовых многорежимных таймеров (счетчиков);
- стек с полной глубиной для связи подпрограмм возврата и памяти данных;
- двоичную и десятичную арифметику.
Базовая организация предоставляет встроенные средства расширения своих ресурсов, которые предусматривают либо реализацию вне кристалла всей памяти программ, либо расширение памяти, имеющейся внутри кристалла до 64 Кб. Имеется возможность подключения дополнительной внешней памяти данных в 64 Кб. Дальнейшее расширение ресурсов может быть выполнено только с помощью внешних средств.
Микроконтроллер конструктивно выполнен в корпусе, имеющем 40 выводов, как изображено на рисунке 1. Назначение выводов микросхемы приведено в таблице 1.
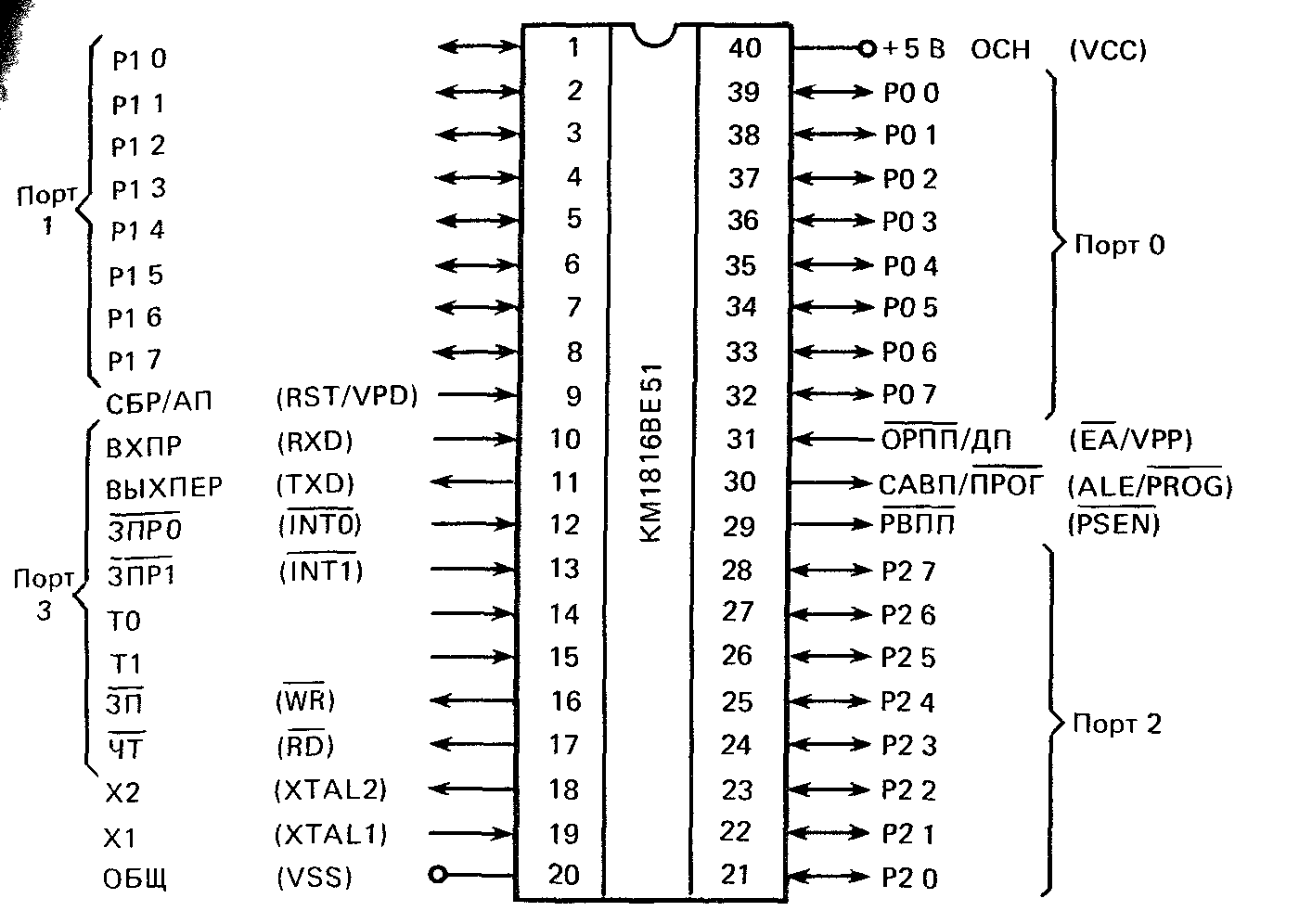
Рисунок 1 - Расположение и обозначение выводов КМ1816ВЕ51
Таблица 1- Назначение выводов микросхемы КМ1816ВЕ51
|
Номера контактов |
Обозначение англ. – рус. |
Назначение |
Тип сигнала |
Состояние |
|
1 |
2 |
3 |
4 |
5 |
|
1-8 |
1-8 Р1.0 - Р1.7 |
Входы-выходы порта Р1 |
вх/вых |
1, 0, z |
|
9 |
RST/VРD – СБР/АП |
Cброс/питание холостого хода |
вх |
1 |
|
10 |
RхD - ВХПР |
Вход приемника |
вх |
1 |
|
11 |
ТхD - ВЫХПЕР |
Выход передатчика |
вых |
1 |
|
12 |
INT0 – ЗПР 0 |
Запрос прерывания 0 |
вх |
0 |
|
13 |
INT1 - ЗПР 1 |
Запрос прерывания 1 |
вх |
0 |
|
14 |
Т0 |
Вход таймера/счетчика 0 |
вх |
1 |
|
15 |
Т1 |
Вход таймера/счетчика 1 |
вх |
1 |
|
16 |
WR - ЗП |
Сигнал записи во внешнее ОЗУ |
вых |
0 |
|
17 |
RD - ЧТ |
Сигнал чтения внешнего ОЗУ |
вых |
0 |
|
Продолжение таблицы 1 |
||||
|
1 |
2 |
3 |
4 |
5 |
|
18-19 |
Х1, Х2 |
Подключение внешнего резонатора |
1-вх, 2-вых |
1 |
|
20 |
VSS – ОБЩ |
"Земля" (Общий вывод И.П.) |
|
|
|
21-28 |
P2.0 - P2.7 |
Входы-выходы порта P2 |
вх/вых |
1, 0, z |
|
29 |
PSEN - РВПП |
Активация внешней памяти программ |
вых |
0 |
|
30 |
ALE/PROG – САВП/ПРОГ |
Строб фиксации адреса внешней памяти |
вых |
1/0 |
|
31 |
ЕA/ VPP – ОРПП/ДП |
Активация внутренней памяти программ / программирование внутренней памяти программ |
вх |
0/1 |
|
32-39 |
Р0.7 - Р0.0 |
Входы-выходы порта Р0 |
вх/вых |
1, 0, z |
|
40 |
VCC - ОСН |
Питание + 5В |
|
|
В архитектуре МК51 и ее модификациях использован стандартный для МК принцип независимости сред для хранения программ и данных. Структурную схему МК51 рассмотрим на рисунке 2.
Контроллер состоит из следующих функциональных узлов: - АЛУ (арифметико-логическое устройство); - резидентных памяти программ (РПП) и памяти данных (РПД); - регистров специальных функций (РСФ); - портов параллельного и последовательного ввода-вывода; - таймеров; - системы прерывания.
Архитектура МК51 включает пять типов пространств, четыре из которых являются областями данных:
RSEG Пространство регистров;
DSEG Пространство внутренней памяти данных;
BSEG Битовое пространство данных;