

ВВЕДЕНИЕ
С развитием технологии цифровых интегральных схем появилась возможность создавать сложные устройства обработки цифровой информации в виде компактных микросхем. Однако увеличение сложности реализуемого алгоритма обработки, как правило, сужает область его применения. Устранить противоречие между сложностью БИС и ее универсальностью удалось за счет программирования выполняемых микросхемой функций.
Широкую популярность микропроцессоры получили благодаря своим высоким функциональным возможностям и эксплуатационным характеристикам, придавшим средствам вычислительной техники и автоматики качественно новые свойства: появились и получили широкое распространение микрокалькуляторы, микроЭВМ, персональные ЭВМ, интеллектуальные роботы. Такие характеристики микропроцессоров как малые габариты, масса, потребляемая мощность позволили применять их в областях, в которых использование традиционных средств вычислительной техники было принципиально невозможным.
В настоящее время промышленностью освоено и серийно выпускается более пятнадцати микропроцессорных комплектов БИС различной, архитектуры. Развитие элементной базы микропроцессоров при этом идет по нескольким, взаимодополняющим направлениям, что обеспечивает возможность гибкой адаптации архитектуры систем управления требованиям конкретных применений и специфике условий их эксплуатации.
Целью данного курсового проекта является разработка микропроцессорной управляющей микроЭВМ, реализующей заданные взаимодействия с объектом управления и разработка программных средств системы, обеспечивающих выполнение заданного алгоритма управления.
Расшифровка и анализ задания
Задания на курсовой проект включают в себя набор исходных данных и ограничений для проектирования управляющей микроЭВМ.
Задание определяет:
- базовый микроконтроллер на основе которого требуется построить управляющую микроЭВМ;
- алгоритм управления определяется в задании видом функции f1, f2, t1, t2, t3.
Вариант № 4
микроконтроллер МС68НС11Е9
Функция y1=f(x1, x2, x3, x4) X1 & X2 X3 & X4
Функция NU=f(NU1,NU2,K) max ( NU1; NU2 + K)
Время t1 60мкс
Время t2 90мкс
Время t3 80мкс
2 РАЗРАБОТКА ПРОЦЕССОРНОГО МОДУЛЯ, ИНТЕРФЕЙСА,
УТОЧНЕННОЙ СТРУКТУРНОЙ СХЕМЫ
2.1 Основные параметры микроЭВМ
Изготовленный по КМОП - технологии с высокоплотной структурой восьмиразрядный микроконтроллер MC68HC11E9 предназначается для выполнения сложных задач. Для достижения номинальной частоты шины 2 МГц были использованы новые технологии. Кроме того, полностью статическая конструкция позволяет работать на очень низких частотах, тем самым уменьшая потребление энергии.
Основные характеристики микроконтроллера MC68HC11E9:
12 Кбайт ПЗУ;
512 байт ОЗУ;
расширенный 16-разрядный таймер:
4-разрядный предделитель частоты.
Три функции входного захвата и пять-выходного сравнения или
Четыре функции входного захвата и четыре-выходного сравнения.
восьмиразрядный счетчик внешних импульсов.
последовательный интерфейс связи расширенного формата NRZ;
последовательный периферийный интерфейс;
восьмиканальный, восьмиразрядный АЦП;
прерывания реального времени;
система слежения за правильностью работы ОЭВМ;
52-выводной квадратный пластиковый корпус.
Технология с использованием КМОП-структур с высокой степенью компоновки, использованная для создания MC68HC11E9, сочетает в себе малые размеры и высокую тактовую частоту по сравнения с КМОП технологией, одновременно с низким потреблением энергии и высокой устойчивостью по отношения к различным помехам. Основные периферийные функции обеспечиваются встроенными схемами микроконтроллера. В их числе: восьмиканальный 8-разрядный АЦП; асинхронный последовательный интерфейс связи; синхронный последовательный периферийный интерфейс; основной 16-разрядный таймер с тремя входными и пятью выходными линиями, поддерживающий прерывания реального времени; 8-разрядный счетчик внешних импульсов для подсчета внешних импульсов или измерения периодов внешних сигналов.
Схема определения неверного кода операции вызывает немаскируемое прерывание, если в процессе выполнения программы встречается неправильный код команды. Для уменьшения потребления энергии, доступно два программно устанавливаемых режима работы-WAIT и STOP. Блок-диаграмма микроконтроллера MC68HC11E9 показана на рисунке 1.
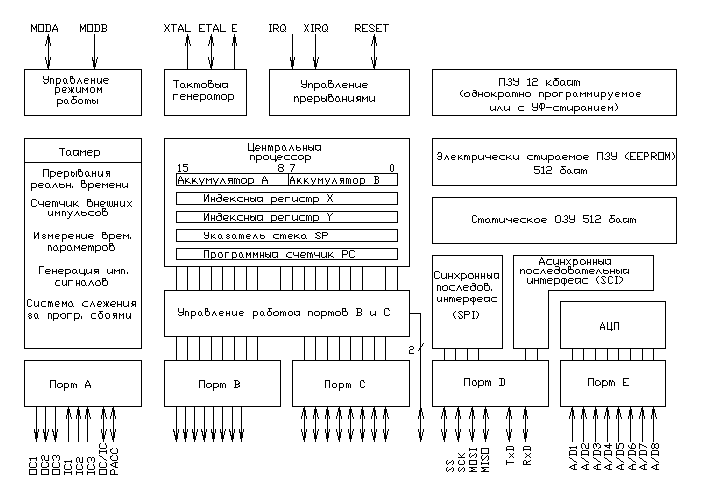
Рисунок 1 - Внутренняя структура ОЭВМ
2.2 Цоколевка и описание выводов
Микроконтроллер изготовляется в квадратном корпусе с четырьмя рядами выводов. Всего выводов-52.
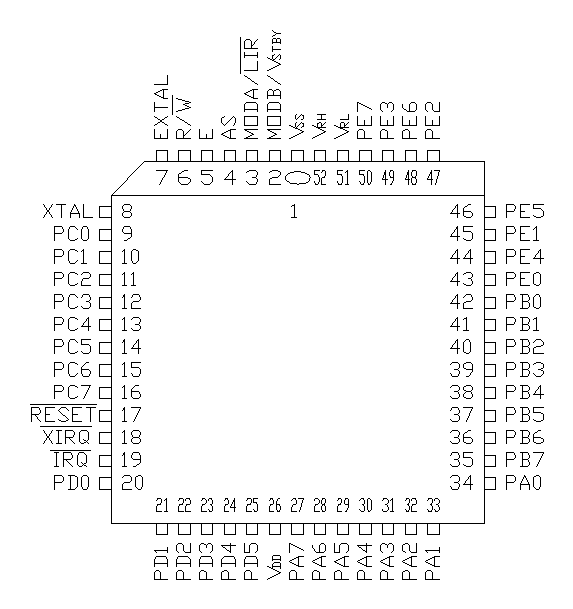
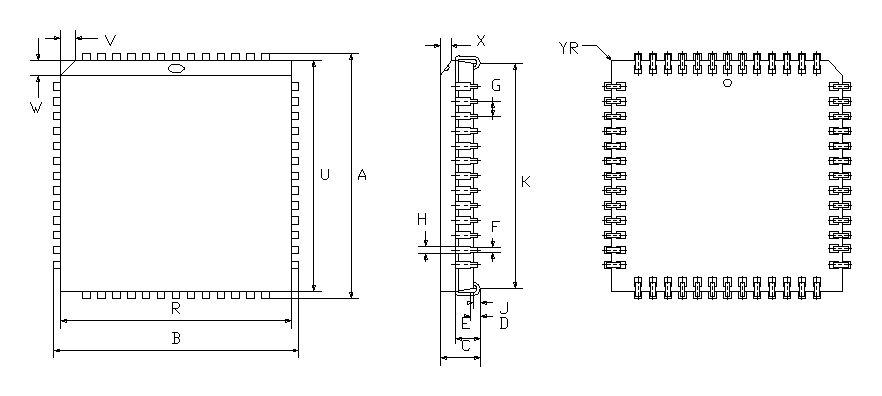
Рисунок 2 – Размеры и расположение выводов
Выводы питания (VDD) и земли (VSS).С помощью этих двух выводов на микроконтроллер подается питание. Вывод VDD является входом положительного потенциала, а VSS - земля. Хотя микроконтроллер MC68HC11E9 и является устройством, изготовленным по КМОП технологии, на многих из его выводах возможны очень быстрые изменения сигналов.
Сброс (RESET/).Двунаправленный сигнал с активным низким уровнем. Используется как вход для начальной инициализации контроллера и является выходом с открытым стоком для инициализации внешних устройств при внутреннем сбросе, вызванным тактовым монитором или системой слежения.
Входы внешней синхронизации (XTAL и EXTAL).Эти два вывода обеспечивают соединение микроконтроллера с другими микроконтроллерами или генераторами, совместимыми с КМОП-схемотехникой для управления схемой внутреннего генератора. Частота синхронизации на этих выводах должна быть в четыре раза выше требуемой внутренней частоты синхронизации E.
Вывод тактовой частоты синхронизации E (E).Этот выход можно использовать для синхронизации внешних устройств. Частота на выводе синхронизации E составляет одну четвертую от частоты, которая подается на выводы XTAL и EXTAL. Если уровень сигнала E - низкий, то имеет место внутренний процесс обработки, если уровень E высокий - то разрешается доступ к данным. Генерация сигналов E прекращается при переходе микроконтроллера в режим STOP.
Запрос прерывания (IRQ/).Вход IRQ/ может использоваться для запроса асинхронного прерывания MC68HC11E9. С помощью регистра OPTION можно программно выбирать срабатывание по фронту или уровню сигнала.
Немаскируемое прерывание (XIRQ/).Этот вывод может использоваться для запроса немаскируемого прерывания после инициализации. Во время сброса бит X регистра условий устанавливается и все прерывания маскируются до тех пор, пока они не будут разрешены программно. Вывод XIRQ/ срабатывает по уровню сигнала.
Выводы MODA/LIR/ и MODB/VSTBY.В течение сброса состояние выводов MODA и MODB используется для выбора одного из четырех режимов работы. Соответствие между режимом работы и состоянием этих выводов представлено в таблице 1.
Таблица 1- Режимы работы в зависимости от состояния выводов MODA и MODB.
|
MODB |
MODA |
Выбираемый режим |
|
1 |
0 |
Однокристальный режим |
|
1 |
1 |
Расширенный режим |
|
0 |
0 |
Режим загрузки |
|
0 |
1 |
Режим теста |
Опорные напряжения ацп (vrl и vrh).На эти два вывода подаются напряжения, относительно которых происходят измерения в системе ацп.
2.3 Программируемый таймер
В состав программируемого таймера входит один шестнадцатиразрядный счетчик, на вход которого поступают импульсы с предделителя (с коэффициентом деления 1, 2, 4 или 16). На вход предделителя подается тактовая частота E. Входные функции таймера называются функциями входной фиксации. Эти функции переписывают состояние счетчика в ответ на обнаружения фронта на входной линии. Выходные функции, называемые функциями выходного сравнения, выполняют определенные действия в ответ на совпадение значения в счетчике и в шестнадцатиразрядном регистре выходного сравнения. Данная система таймера содержит три регистра входной фиксации и пять регистров выходного сравнения.
2.4 Счетчик
Шестнадцатиразрядный счетчик, или регистр счетчика таймера, является ключевым элементом системы таймера. После сброса из трех коэффициентов деления. Биты управления предделителем могут быть перезаписаны только в течение первых 64 циклов после сброса. Программа может в любое время считывать показания счетчика, никак не влияя на его состояние, поскольку его считывание и тактирование происходит в противоположных фазах сигнала E.
При чтении значения счетчика первым следует считывать старший байт. При чтении этого байта, младший байт помещается в буфер. Значение этого буфера не изменяется после сброса и доступ к нему происходит только при чтении младшего байта счетчика. Для команд, считывающих два байта, эти два чтения происходят во время двух последовательных микроконтроллер настраивается на использование частоты E в качестве синхронизации для этого счетчика. Программная инициализация может настроить систему таким образом, чтобы использовать один циклов шины.
Сам счетчик во время сброса устанавливается в $0000 и является регистром, доступным только для чтения с одним исключением: в режиме теста любая запись в старший байт счетчика, независимо от его величины, устанавливает в счетчике значение $FFF8.
При изменении значения счетчика с $FFFF на $0000 устанавливается флаг переполнения таймера (TOF) в регистре 2 флагов прерываний таймера (TFLG2). Прерывания разрешаются установкой бита разрешения прерываний (TOI) регистра 2 маскирования прерываний таймера (TMSK).
2.5 Прерывания реального времени
Прерывания реального времени микроконтроллера управляется с помощью двух бит (RTR1 и RTR0) регистра PACTL, которые предназначены для выбора одного из четырех возможных периодов прерываний. Бит RTII регистра TMSK2 разрешает прерывания реального времени. Каждый раз, когда установлен бит RTIF регистра TMSK2, при установке бита RTII регистра TMSK2, запрашивается прерывание. После сброса проходит один период прерывания реального времени перед тем как флаг RTIF будет установлен в первый раз.
2.6 Счетчик импульсов
Счетчик импульсов - это 8-разрядный счетчик, доступный для чтения и для записи. Счетчик импульсов может работать в одном из двух режимов: в режиме счетчика внешних событий или в режиме измерения длины импульса, в зависимости от состояния бита PAMOD регистра PACTL. В режиме счетчика событий 8-разрядный счетчик увеличивает свое значение на единицу с приходом каждого нового импульса на внешнем входе. Максимальная частота счета для этого режима = E/2. В режиме измерения длины импульса во время активного сигнала на внешнем выводе PAI счетчик увеличивает свое значение с каждым 64-м тактом частоты синхронизации E.