

СОДЕРЖАНИЕ
Введение 3
1 Техническое задание 4
2 Разработка электрической принципиальной схемы индикатора шин 5
3 Обоснование выбора микропроцессора 8
4 Описание структуры микропроцессора 10
5 Описание блок-схемы работы устройства 21 Заключение 22 Список литературы 23 Приложение 24
ВВЕДЕНИЕ
Задачей курсового проекта является развитие и закрепление навыков самостоятельной работы при решении конкретной задачи, подбора и разработки управляющей программы МП.
Микроэлектроника, заявившая о себе в начале шестидесятых годов, сегодня оказывает решающее влияние на техническое перевооружение во всех областях радиоэлектроники. Цифровая техника - самое перспективное направление в современной электронике, в науке, народном хозяйстве, в учебном процессе в общеобразовательных школах, лицеях, техникумах, институтах и университетах. Без нее немыслим дальнейший научно-технический прогресс.
Постоянное повышение требований к качеству и надежности - характерная черта современного производства. Это обстоятельство приводит к необходимости постоянно модернизировать соответствующие информационно - управляющие системы. При этом, если эксплуатационные особенности, точность работы, надежность узлов системы, являющихся объектами контроля и управления (датчики, сигнализаторы, измерители и т.д.) не будут соответствовать функциональным и коммутационным возможностям устройств микропроцессорной техники, то рассчитывать на существенное улучшение свойств модернизируемой системы вряд ли стоит.
Цель курсового проекта: разработать устройство индикатор шин, изложить и оформить соответствующую документацию в соответствии с системой государственных и отраслевых стандартов.
1 Техническое задание
Как с технической, так и с экономической стороны индикатор шин удовлетворяет большинству критериев идеального индикатора шин: он простой, высоко-интегрированный, с малыми габаритами. Многие параметры ИШ программно -управляемые, что позволяет заложить в устройство новые возможности. Все это делает индикаторы очень перспективными приборами.
Индикатор шин применяют при настройке и ремонте аппаратных устройств на базе МП К1810ВМ86. Индикатор состоит из микропульта, платы процессора и сорокаштырьковой вилки.
При начальной настройке устройства, когда нет готовых программ в ПЗУ, с помощью подстановки данных можно запрограммировать предусмотренные на плате ВУ и проверить ОЗУ.
Режим подстановки данных позволяет использовать индикатор шин как оценочное устройство при работе с МП К1810ВМ86.
i
Технические характеристики индикатора шин определяются характеристиками применяемого микропроцессора. Таким образом, индикатор обладает следующими параметрами:
- допустимый диапазон температур -10° С до + 70° С \
- напряжение (питание индикатора шин осуществляется через соответствующие контакты вилки) + 5 В;
- максимальная тактовая частота 5МГц ;
- максимальная потребляемая мощность <\.15Вт.
2 РАЗРАБОТКА ЭЛЕКТРИЧЕСКОЙ ПРИНЦИПИАЛЬНОЙ СХЕМЫ ИНДИКАТОРА ШИН
Индикатор шин предназначен для аппаратной настройки устройств на основе МП К1810ВМ86. Индикатор состоит из микропульта, платы процессора и сорокаштырьковой вилки (рисунок 1).
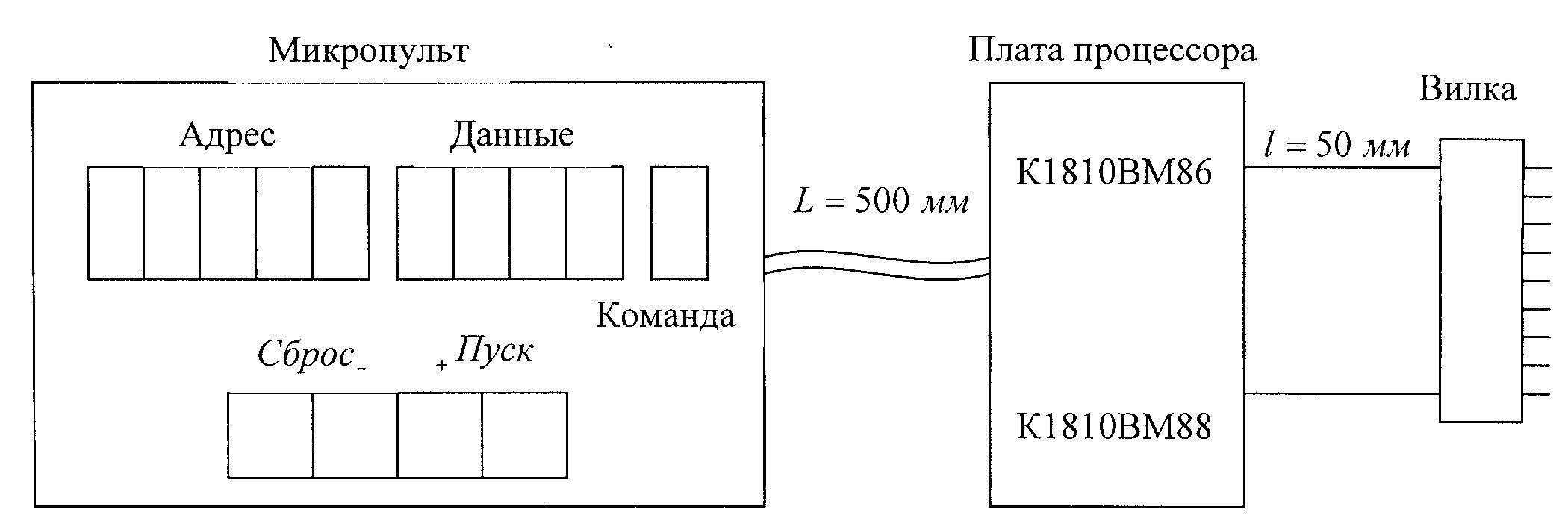
Рисунок 1 - Общая структура индикатора шин
Вилка устанавливается в розетку МП настраиваемого устройства. Питание индикатора осуществляется через соответствующие контакты вилки. Плата процессора содержит эмулирующий МП К1810ВМ86, который всеми выводами, за исключением RDY, подключен через плоский кабель длиной 50 мм к вилке индикатора шин. Сигнал RDY, поступающий с платы пользователя, «перехватывается» индикатором для обеспечения пошагового режима работы.
Микропульт соединен с платой процессора пятипроводным кабелем длиной 500 мм. С него в плату процессора поступают в последовательном коде соответствующие команды, а с платы также в последовательном коде выдается в микропульт информация о состоянии шины адреса, данных и управляющих сигналов эмулирующего МП.
Микропульт имеет 10-разрядный цифровой дисплей для отображения адреса, данных и управляющих сигналов МП и четыре клавиши управления работой индикатора шин.
Клавиша «Сброс» предназначена для физического сброса микропульта и платы процессора. Клавиши «-» и «+» необходимы для перемещения запятой по разрядам цифрового дисплея влево и вправо соответственно, а также для увеличения и уменьшения шестнадцатеричной цифры соответствующего индикатора. Кратковременное нажатие на клавишу «-» или «+» (менее 1/3 с) изменяет значение шестнадцатеричной цифры, а более длительное - перемещает запятую.
Клавиша «Пуск» служит для запуска индикатора шин в работу в выбранном режиме. По сбросу индикатор переходит в исходное состояние и на его правом крайнем индикаторе появляется символ выбранного режима. По нажатию клавиши «-» или «+» последовательно перебираются все возможные режимы работы индикатора шин. После выбора соответствующего режима можно нажать клавишу «Пуск» и перевести индикатор на работу в этом режиме.
Среди возможных режимов работы индикатора шин: Т - пошаговый, G - автоматический, q - полуавтоматический с остановом на контрольной точке, Р - установки контрольной точки, А - перехода по заданному адресу, Н - полуавтоматический с остановом на контрольной точке и подстановкой данных, U - пошаговый с подстановкой данных.
Опрос клавиатуры, управление индикацией и связь с платой процессора по двухпроводной линии осуществляет однокристальная ЭВМ (ОЭВМ) К1816ВЕ35 под управлением монитора микропульта «зашитого» в РПЗУ К573РФ2.
Выдачу всех необходимых управляющих сигналов на плату процессора и связь с микропультом по двухпроводной линии обеспечивает ОЭВМ под управлением монитора процессорной платы.
Регистры D12 и D14 предназначены для сохранения адреса по сигналу ALE МП и данных по сигналу ALE35 ОЭВМ, регистр D17 - для сбора информации с управляющих выводов МП, регистры D19 и D20 - для подстановки кода команды и данных, системный контроллер D15 - для выработки управляющих сигналов в максимальном режиме. На триггере D16 собрана схема управления готовностью в пошаговом режиме.
При установке эмулирующего МП К1810ВМ86 выключатель SA2 необходимо перевести в соответствующее положение. Индикатор шин удобно применять при настройке и ремонте устройств на базе МП К1810ВМ86, прогоняя «зашитую» в РПЗУ программу в автоматическом, пошаговом или полуавтоматическом режиме с остановом на контрольной точке.
Если неисправность заключается в «залипании» отдельных сигналов адреса, данных или управляющих сигналов, то ее удается локализировать за первые же несколько шагов в пошаговом режиме.