Министерство Образования и науки Российской Федерации
Санкт-Петербургский государственный университет технологии и дизайна
Кафедра автоматизации производственных процессов
Курсовой проект:
«Расчет динамики систем управления».
Вариант №4.
Санкт-Петербург
2011 г.
Содержание
Введение……………………………………………………………………………………3
Технологическая часть………………………………………………………....................4
1. Задание для курсового проектирования…………………………………….....………...5
2. Вывод передаточной функции для рабочей емкости, в которой регулируется уровень жидкости……………………………………………………………………………………...8
3. Получение уравнения движения САР…………………………………………………..16
4. Синтез САР на ЭВМ с применением метода эффективных полюсов и нулей……....19
5. Исходная предпосылка метода………………………………………………………….21
6. Расчет границ рабочей области…………………..……………………………………..22
7. Расчет переходного процесса с помощью решателей системы MATLAB………...…31
8. Автоматизация расчета рабочей области………………………………………………33
9. Принципиальная схема сар…………………………………………………………….36
Список использованной литературы………………………………………………….....39
Приложение…………………………………………………………………………...…..40
Введение
В курсовом проекте привожу выводы передаточных функций объектов регулирования и некоторых других элементов, содержащихся в предлагаемых системах автоматического регулирования (САР). Кроме того рассматриваю вопросы синтеза САР с применением метода эффективных полюсов и нулей, разработанного профессором кафедры АПП В.А. Климовым.
Я рассматриваю систему автоматического регулирования уровня жидкости в гидравлической емкости.
Нужно самостоятельно сформировать структурную схему САР, подобрав для нее все необходимые элементы и обеспечить, если это потребуется, динамическую коррекцию системы в целях достижения требуемых показателей качества регулирования, а также необходимы рекомендации для автоматизации расчетов на компьютере в системе МАТLАВ показателей качества регулирования и построения переходных процессов.
Технологическая часть:
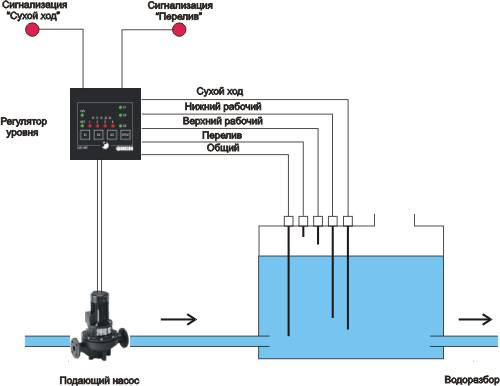
При эксплуатации баков, емкостей и резервуаров часто стоит задача по автоматическому поддержанию уровня жидкости в емкости в заданном диапазоне. Применение автоматики позволяет легко контролировать уровень жидкости, снизить время работы насосов и потребление электроэнергии ими, а также защитить насосы от работы в сухом режиме, то есть при отсутствии жидкости. В систему регулирования уровня входят датчики уровня, регулятор уровня и подающий или опорожняющий насос. Такая система позволяет поддерживать уровень жидкости в резервуаре, сигнализировать о переливе и защищать насос от «сухого хода». На рисунке показан пример системы регулирования уровня. Работа системы организована по следующей схеме. В ёмкости устанавливается пятиэлектродный кондуктометрический датчик (в зависимости от задач электродов может быть меньше). К входу 1 подключается электрод «сухого хода», к входам 2 и 3 – датчики нижнего и верхнего рабочих уровней, к входу 4 – электрод перелива. Пятый электрод осуществляет функцию общего. Система работает на долив от нижнего до верхнего рабочего уровня. Включение насоса осуществляет реле в зависимости от уровня жидкости в ёмкости. Реле обеспечивает защиту насоса от «сухого хода» и сигнализацию об этом. Другое реле используется для сигнализации о переливе. Для предотвращения преждевременного срабатывания защиты от «сухого хода» и от перелива введены задержки включения/отключения реле при смачивании/осушении соответствующих электродов.