

![]()
Физические основы механики.
1. Кинематика поступательного движения.
1.1 Механическое движение.
Материя,
как известно, существует в двух видах:
в виде вещества и поля. К первому виду
относятся атомы и молекулы, из которых
построены все тела. Ко второму виду
относятся все виды полей: гравитационные,
электромагнитные, ядерные, слабые.
Различные виды материи при определенных
условиях могут превращаться друг в
друга: электрон и позитрон аннигилируют
и превращаются в
![]() -квант
и обратно.
-квант
и обратно.
Формой существования материи является движение во времени и пространстве. Под движением понимают любое ее изменение.
Простейшей и в тоже время наиболее распространенной формой движения в природе является механическое движение, т.е. изменение взаимного положения тел во времени.
Раздел физики изучающий закономерности механического движения и взаимодействия тел называется механикой. Механическое действие со стороны других тел приводит к изменению состояния движения рассматриваемого тела или к его деформации, т.е. к изменению взаимного расположения его частей.
Механику тел, которые движутся с ν<<c, называют классической в отличие от релятивистской механики быстро движущихся тел. Основы первой были разработаны Ньютоном и она называется классической или ньютоновской. Релятивистская механика основана на специальной теории относительности Эйнштейна и содержит ньютоновскую механику как частный случай при ν<<c.
Классическая механика содержит два раздела: кинематику и динамику.
Кинематика описывает движение тел, не рассматривая причин, его вызвавших. Основным разделом механики является динамика, которая изучает влияние взаимодействия тел на их механическое движение, т.е. рассматривает движение в причинно-следственной связи.
В механике для описания реальных тел пользуются в зависимости от условий конкретной задачи различными приближенными моделями или абстракциями: материальная точка, абсолютно твердое тело, абсолютно упругое тело, абсолютно неупругое тело и др.
1.2.Пространство и время.
Все тела существуют и движутся в пространстве и времени. Эти понятия являются основополагающими для всех естественных наук. Любое тело имеет размеры, т.е. свою пространственную протяженность. Время выражает порядок смены состояний, составляющий любой процесс, любое движение. Оно является мерой длительности этого процесса. Т.о. пространство и время представляют собой наиболее общие формы существования материи.
Не имеет смысла говорить о положении и механическом движении тела в пространстве «вообще», всегда говорят о положении и движении относительно какого-то другого конкретного тела: Солнца, Земли и др.
1.3. Система отсчета.
Для однозначного определения положения тела в произвольный момент времени необходимо выбрать систему отсчета - систему координат, снабженнуя часами и жестко связаннуя с абсолютно твердым телом, по отношению к которому определяется положение других тел в различные моменты времени. При этом под часами подразумевают любое устройство для измерения времени, точнее промежутков времени между событиями, т.к. в силу однородности времени, его начало отсчета можно выбрать произвольно. В ньютоновской механике свойства пространства описываються геометрией Эвклида, а ход времени одинаков во всех системах отсчета. Систему отсчета, связанную с Землей называют земной.
Наиболее
часто пользуются правой, прямоугольной,
декартовой системой координат, рис.1.
Здесь
![]() -
единичные по модулю, взаимно перпендиклярные
векторы-орты системы координат, образующие
ее ортонормированный
базис.
-
единичные по модулю, взаимно перпендиклярные
векторы-орты системы координат, образующие
ее ортонормированный
базис.
С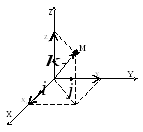 истема
координат называется правой,
т.к.
при наблюдении из конца орта
истема
координат называется правой,
т.к.
при наблюдении из конца орта
![]() вращение от
вращение от
![]() к вектору
к вектору
![]() (по
кратчайшему расстоянию) видно против
часовой стрелки, т.е. взаимная ориентация
векторов
(по
кратчайшему расстоянию) видно против
часовой стрелки, т.е. взаимная ориентация
векторов
![]() ,
,![]() ,
,![]() совпадает
с взаимной ориентацией трех пальцев
правой
руки
(большого, указательного и среднего),
если они перпендикулярны.
совпадает
с взаимной ориентацией трех пальцев
правой
руки
(большого, указательного и среднего),
если они перпендикулярны.
Положение
т. М относительно системы координат
задается двумя способами: указанием
всех координат точки, x, y, z, , либо указанием
её радиус-вектора
![]() ,
который можно разложить по базису
,
который можно разложить по базису
![]() ,
,![]() ,
,![]() :
:
![]()
Координаты
точки М x, y, z, называются также координатами
или компонентами радиуса-вектора
![]() относительно базиса, векторы
относительно базиса, векторы
![]() -
составляющими вектора
-
составляющими вектора
![]() по
осям координат. Т.к. система ортогональна,
то x, y, z, равны соответствующим проекциям
вектора
по
осям координат. Т.к. система ортогональна,
то x, y, z, равны соответствующим проекциям
вектора
![]() на
оси координат.
на
оси координат.
![]()
![]()
![]()
где
α, β, γ - углы между
![]() и ортами осей координат.
и ортами осей координат.