

Кошкин Ю.Н. ОТУ / tau_2
.pdf
|
W(p) = x(p) = |
T |
2 |
p |
2 |
k |
. |
(5) |
|
G(p) |
|
|
+ T p+1 |
|
|
||
|
|
1 |
|
|
2 |
|
|
|
3.1. Переходная характеристика получается при решении уравнения (1), если g(t) = 1 и имеет вид, |
||||||||
показанный на рис.38 для ряда значений ξ = |
T2 |
|
. Из рисунка видно, что с ростом ξ |
колебательность |
||||
|
|
2T |
|
|
|
|
||
|
|
|
1 |
|
|
|
|
|
переходного процесса уменьшается, исчезая совсем при ξ ≥1. |
|
|||||||
g(t) |
ξ=0,1 |
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
|
ξ=0,4 |
|
|
xуст |
|
|
||
|
ξ=1 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
k |
g(t)=1 |
t |
|
|
|||
|
Рис.38 |
|
|
|
|
|
|
|
3.2. Дифференцируя переходную функцию получим импульсную переходную функцию, один из |
||||||||
возможных видов импульсной переходной функции показан на рис.39. |
|
|||||||
δвых(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δвых(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.39 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.3. Частотная характеристика |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
3.3.1. |
|
|
|
|
|
|
|
x(jω) |
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
W(jω) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
G(jω) = |
|
(1− T |
2ω 2 ) + jT ω . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(6) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Освобождаясь от мнимой части в знаменателе, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
k(1− T2ω2) |
|
|
|
kTω |
|
|
|
|
|
|
|
|
|
|
||||||||||||
W( jω) = P(ω) + jQ(ω) = |
|
|
|
|
1 |
|
2 2 − j |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 . |
|
(7) |
|
|||||||||||
(1 |
2 |
|
2 |
) |
2 |
|
(1− T |
2 |
|
2 |
) |
2 |
+ T |
2 |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
− T ω |
|
|
+ T ω |
ω |
|
|
|
ω |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
График ЧХ в обычном масштабе при различных ξ имеет вид (рис.40): |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Im |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k(1− T2ω2) |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
P(ω) = |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
, |
|
(8) |
|||
|
|
|
|
|
|
Re |
|
|
|
|
|
|
|
|
(1− T |
2 |
|
2 |
) |
2 |
+ T |
2 |
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
ω |
|
|
|
|
|
||||||||||
ω=∞ |
|
|
|
|
|
|
ω=0 |
|
|
|
|
|
|
|
|
|
|
1 |
|
kT2ω |
2 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
,5 |
|
|
|
|
|
|
|
Q(ω) = − |
|
|
|
|
|
|
|
|
|
|
, |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
2 |
|
|
|
2 |
|
|
2 |
(9) |
|||||||
ω3 |
ξ= |
|
|
ω1 |
|
|
|
|
|
|
|
(1 |
− T |
ω |
) |
+ T |
ω |
|||||||||||||||||||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T2ω |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
|
|
|
ω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ξ |
|
|
|
|
|
|
|
|
A(ω) = |
|
|
|
|
|
|
|
|
|
, |
ϕ(ω) = −arctg |
, |
|||||||||||||||
ωi |
|
|
|
|
|
|
|
|
|
(1− T2ω2) |
2 + T2ω2 |
|
1− T12ω2 |
|||||||||||||||||||||||
|
|
Рис.40 |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
ωi |
– частота собственных колебаний |
|
|
|
|
|
|||||||||||||||||||||||||
3.3.2. ЛАХ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
20lg A= 20lgk − 20lg (1− T12ω 2 )2 + T22ω 2 |
(10) |
при k = 1
20lg A = −20lg
 (1− T12ω2 )2 + T22ω2 ,
(1− T12ω2 )2 + T22ω2 ,
27

20lgA |
|
|
|
|
т.к. ξ = T2 |
, |
то |
|
T = 2ξ T |
и |
|||||
|
|
ξ=0,1 |
|
|
|
||||||||||
40 |
|
|
|
|
|
2T1 |
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
20lg A = −20lg |
1+ (4ξ |
2 −1)T2ω2 |
; |
|
||||||
30 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1) |
При малых частотах |
|
|
|
|
|
|||||
|
|
ξ=0,3 |
|
|
(4ξ2 −1)T2ω2 << 1, |
тогда |
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
20lg A= −20lg1= 0. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
2) |
При больших частотах |
|
|
|
|
|||||
10 |
|
|
|
|
(4ξ2 −1)T2ω2 >>1, тогда |
|
|
|
|
|
|||||
|
ξ=0,4 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20lg A = −20lgTω |
4ξ2 −1. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|||||||
1 |
|
1/T1 |
10 |
lgω |
|
|
1 |
|
|
|
|
|
|
|
|
ξ |
3) |
В области средних частот |
|
|
|
||||||||||
0 |
=1, |
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
0 |
|
1= (4ξ2 −1)T2ω2 |
или |
ω |
|
= |
|
|
. |
||||
|
|
|
|
|
C |
T |
|
|
|||||||
|
|
|
|
|
|
1 |
|
|
|
|
4ξ2 −1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
- |
|
На |
рис.41 |
приведены |
|
|
ЛАХ |
|||||
|
|
|
|
колебательного |
звена. |
Она |
представляет |
||||||||
|
|
|
4 |
|
|||||||||||
|
|
|
0 |
|
|||||||||||
-90° |
|
|
д |
|
|||||||||||
|
|
б |
|
собой |
ломанную линию, состоящую из двух |
||||||||||
|
|
/ |
|
||||||||||||
|
|
д |
|
||||||||||||
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
асимптот, к которым стремится |
ЛАХ |
при |
||||||||
|
|
|
1, |
|
|||||||||||
|
|
|
0 |
|
ω → 0 и при ω → ∞. Одна асимптота – ось |
||||||||||
|
|
|
|
|
|||||||||||
|
|
|
−ϕ(ω) |
|
абсцисс при k = 1. В общем случае она идет |
||||||||||
|
|
|
|
вдоль оси абсцисс |
на |
расстоянии |
20lgk . |
||||||||
-180° |
|
|
|
|
Другая асимптота имеет наклон -40 дб/дек. |
||||||||||
−ϕ |
|
Рис.41 |
|
Точка |
пересечения |
асимптот |
соответствует |
||||||||
|
|
|
частоте ωc = T1 . |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Если 0,4 < ξ < 0,7, то расхождение между асимптотической и истинными ЛАХ не превышает ±3дб., |
|||||||||||||||
поэтому для таких звеньев можно пользоваться асимптотическими ЛАХ. |
|
|
|
|
|
|
|
|
|
||||||
При других значениях ξ |
асимптотическую ЛАХ корректируют с помощью графиков поправок, |
||||||||||||||
приведенных в литературе (рис.42). |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
δ, дб |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
ξ=0,05 |
|
|
|
|
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
ξ=0,10 |
|
|
|
|
14 |
|
|
|
|
|
|
ξ=0,15 |
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ξ=0,20 |
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ξ=0,25 |
|
|
||
|
8 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ξ=0,30 |
|
|
||
|
6 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
ξ=0,40 |
|
||
|
4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
ξ=0,50 |
||
|
2 |
|
|
|
|
|
|
|
|
|
ωΤ |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-2 |
|
|
|
|
|
|
|
ξ=0,60 |
|
|
|
-4 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ξ=0,80 |
|
|
||
|
-6 |
|
|
|
|
|
|
ξ=1,0 |
|
|
|
|
-8 |
|
|
|
|
|
1 |
2 |
3 |
4 |
5 6 7 8 910 |
|
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,8 0,9 |
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Рис.42 |
|
|
|
||
Фазовая характеристика имеет при ω → ∞, ϕ → |
−π . |
|
|
|
|||||||
4. |
Пример: Покажем, что двигатель постоянного тока является колебательным звеном. |
||||||||||
|
|
|
|
|
|
28 |
|
|
|
|
|

|
|
|
|
|
|
ОВД |
Uв |
U = Eд +iя Rя + Lя |
|
diя |
, |
(1) |
|||
|
|
|
|
|
iя |
|
|
dt |
|||||||
|
|
|
|
|
|
|
Eд = keω , |
|
dω |
|
|
|
|
(2) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
ω |
|
Mд − MСТ |
= J |
|
, |
|
|
(3) |
||
U |
Д |
|
|
|
|||||||||||
Mд |
dt |
|
|
||||||||||||
|
|
|
|
|
|
|
Mд = kмiя |
, |
|
|
|
(4) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
MСТ |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
где |
|
|
|
|
U |
– входное напряжение якоря двигателя (входной сигнал); |
|
|||||||
ω– скорость вращения двигателя (выходной сигнал);
ke,kм – постоянные коэффициенты;
J– момент инерции якоря двигателя;
|
|
Mд ,MСТ |
– момент, развиваемый двигателем и момент сопротивления. |
|||||||||||||||||||||||||||||||||||||
Положим MСТ |
= 0. Решив совместно уравнения (1) ÷ (4) относительно U и ω , получим |
|||||||||||||||||||||||||||||||||||||||
подставляя (4) в (3) |
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|
dω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
iя |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
kм |
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
и полученный результат в (1), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
U = k |
ω + |
|
JRя |
|
|
dω |
+ |
|
JLя |
|
d2ω |
, |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
kм |
|
|
|
dt |
|
|
|
kм |
|
dt2 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Разделим левую и правую часть на ke |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
JL |
я |
RЯ d2ω |
+ |
|
JR |
я |
|
|
dω |
|
+ω = kU , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
k |
e |
k |
м |
|
|
|
|
|
dt2 |
|
|
k |
e |
k |
м |
|
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RЯ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где k = |
|
|
– коэффициент передачи двигателя (1/сек). |
|
||||||||||||||||||||||||||||||||||||
ke |
|
|||||||||||||||||||||||||||||||||||||||
Обозначим |
|
Lя |
= T |
; |
|
JRя |
|
|
|
= T . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Rя |
|
kekм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
я |
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Имеем T T |
|
d2ω |
+ T |
dω |
+ω = kU . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
dt2 |
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
я м |
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
5.Идеальное дифференцирующее звено
1.Звено, выходной сигнал которого пропорционален дифференциалу от входного сигнала называется дифференцирующим звеном:
g(t) |
ИДЗ |
x(t) |
|
|
рис. 43
Передаточная функция
x(t) = k |
dg(t) |
, |
(1) |
|
dt |
||||
|
|
|
k – коэффициент передачи дифференцирующего звена имеет размерность [сек].
Переходим к преобразованию по Лапласу
X(p) = kpG(p). |
(2) |
|
X(p) |
|
(3) |
|
W(p) = |
G(p) = kp. |
|||
|
||||
Уравнение (3) показывает, что порядок оператора p числителя выше порядка знаменателя. Это говорит о том (как уже ранее говорилось), что реально такого звена не существует.
Однако с теоретической точки зрения идеальное дифференцирующее звено представляет интерес.
29

3.3.1. Переходная функция идеального дифференцирующего звена при g(t) =1, равна x(t) = kδ(t) |
||||||||
(рис.44), где δ(t) = |
d1(t) |
– единичная импульсная функция. |
|
|
||||
|
dt |
|
|
|
||||
x(t) |
|
|
|
3.2. Импульсная переходная функция будет также δ-функцией (рис.44). |
||||
|
|
|
3.3. Частотная характеристика |
|
|
|||
δ(t) |
|
|
|
|
|
|||
|
|
|
|
X(jω) |
|
|
||
|
|
|
|
|
|
|
||
|
|
|
t |
3.3.1. W(jω) = |
G(jω) = jkω |
|
(4) |
|
|
|
|
|
|
|
|
||
Рис.44 |
|
|
|
|
|
Im |
|
|
P(ω) = 0; |
|
|
Q(ω) = kω ; |
|
|
|||
|
|
|
ω→∞ |
|
||||
|
|
|
ϕ(ω) = π . |
|
|
|||
A(ω) = kω ; |
|
|
|
W(jω) |
|
|||
|
|
|
|
2 |
|
ω→0 |
Re |
|
Графически ЧХ в обычном масштабе имеет вид (рис.45) |
||||||||
|
|
|||||||
3.3.2. ЛАХ: |
20lg A(ω) = 20lgk +20lgω |
|
Рис.45 |
|
||||
при k =1 |
|
20lg A(ω) = 20lgω |
|
|
|
|||
20lgA |
|
|
+20 дб/дек |
Наклон ЛАХ соответствует +20 дб на декаду |
||||
|
|
(почему?) (рис.46). |
|
|||||
|
|
|
|
ϕ |
При k ≠1 ЛАХ перемещается параллельно |
|||
+90° |
|
|
|
самой себе по оси ординат на величину 20lgk . |
||||
|
|
|
|
|||||
|
|
|
|
lgω |
ЛФХ: |
ϕ(ω) = π2 . |
|
|
|
|
|
|
|
|
|||
–ϕ |
|
|
|
Рис.46 |
|
|
|
|
4. Пример: |
|
|
|
|
|
|
|
|
|
|
|
iвых |
при |
R = 0; |
|||
|
|
|
iвых |
= C |
Uвх |
; |
||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
Uвх |
|
|
С |
|
|
dt |
||
|
|
|
|
|
|
|
|
|
6. Реальное дифференцирующее звено
Как было указано выше, реализовать идеальное дифференцирующее звено практически невозможно. Оно реализуется только при наличии дополнительных помех, т.е. звеном, обладающим конечной инерционностью.
1. Такое звено описывается уравнением:
g(t) |
|
x(t) |
|
dx(t) |
|
|
|
|
dg(t) |
|
|
|||
|
|
|
|
|
|
|
||||||||
РДЗ |
T dt |
|
+ x(t) = k |
dt , |
(1) |
|||||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
2. Преобразование Лапласа: |
|
||||||||
|
|
рис. 47 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Tp +1)X(p) = kpG(p). |
(2) |
||||||||
Передаточная функция |
|
|
|
X(p) |
|
|
kp |
|
|
|||||
|
|
|
|
|
W(p) = |
|
(3) |
|||||||
|
|
|
|
|
|
G(p) = Tp +1. |
||||||||
|
|
|
|
|
|
|
||||||||
30
Реальное дифференцирующее звено (3) уже нельзя считать типовым, т.к. его можно заменить последовательным соединением идеального дифференцирующего звена W1(p) = kp и апериодического
1
W2 (p) = Tp +1.
3.1.проанализировать самостоятельно;
3.2.проанализировать самостоятельно;
3.3.1.проанализировать самостоятельно;
3.3.2. ЛАХ: 20lg A(ω) = 20lg |
|
kp |
|
+ 20lg |
1 |
. |
|
|
|||||
|
|
Tp +1 |
||||
|
|
|
|
|
|
4. Пример:
R
 iвых
iвых
Uвх С
20lgA
+90°
+45°
0
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
k |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
lg |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
ϕ |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
||
|
|
|
|
к |
|
|
|
|
|
|
|
з |
|
|
|
|
||
|
|
|
е |
|
|
|
|
|
|
|
|
|
у |
|
|
|
||
|
|
/д |
|
|
|
|
|
|
|
|
|
|
|
л |
ь |
ти |
||
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
д |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
+2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕидз |
|
20lg W(jω) |
|
|
рующая |
2 |
lgω |
|
||
-45°
-90° -ϕ°
Uвх = iвых
|
|
|
|
|
|
|
ω=1/Τ |
20 |
|
|
|
||
|
|
- |
д |
|||
|
|
|
|
б |
||
|
|
|
|
/ |
|
|
|
|
|
|
д |
||
|
|
|
|
е |
||
|
|
|
|
к. |
||
ϕ |
20lg (1/Tp+1) |
|
|
АЗ |
|
Рис.48
1 T
R + C ∫0 iвыхdt ,
T
CUвх − CRiвых = ∫iвыхdt ,
0 |
|
||
T |
diвых |
+iвых = kUвх , |
T = RC; k = C . |
|
|||
|
dt |
|
|
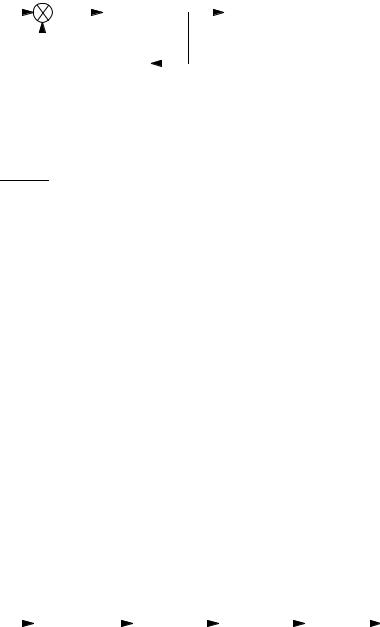
Охват апериодического звена обратными связями
1. Охват ООС. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишем уравнения: |
|
|
||||||||||||
G(p) |
|
ε |
|
|
|
|
|
k |
|
|
X(p) |
|
|
|
|
|
||||||||||||||
|
|
|
|
(p) |
|
|
|
|
|
|
|
|
ε(p) = G(p) − X1(p), |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Tp+1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
X1(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X(p) =ε(p) |
|
, |
|
(1) |
||||||
|
|
|
|
|
|
|
koc |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tp + |
1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X1(p) = X(p)koc . |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
рис. 49 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Решаем (1) совместно относительно G(p) |
и X(p), получим |
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: (1+kkoc ) |
|
|
|
|
k |
|
|
|
|
|
|
|||
W(p) = |
X(p) |
|
= |
|
|
|
k |
|
|
|
|
= |
|
|
1+ kkoc |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
G(p) |
|
Tp + (1+ kkoc): (1+kkoc ) |
|
|
|
T |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
p +1 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
1+ kkoc |
|
|
|
|
|
|||||||||||||||||||
или обозначив
31
k |
|
= |
k |
|
, |
T = |
T |
|
, получим W(p) = |
k1 |
|
. |
|
1+ kk |
|
1+ kk |
|
T p+1 |
|||||||
|
1 |
|
oc |
1 |
oc |
|
|
|||||
|
|
|
|
|
|
|
1 |
|
|
|||
Таким образом при охвате апериодического звена ООС, получим также апериодическое звено, однако, уменьшается коэффициент усиления (передачи) этого звена в установившемся режиме, и увеличивается быстродействие звена, т.к. уменьшается его постоянная времени.
2. Охват ПОС. |
|
|
|
|
|
|
|
|
Проделывая аналогичные выкладки, получим: |
|||||||||||||||||||||
G(p) |
|
|
ε |
|
|
|
k |
X(p) |
||||||||||||||||||||||
|
|
|
|
(p) |
|
|
|
|
|
|
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Tp+1 |
|
|
|
|
|
|
|
|
W(p) = |
|
|
, |
|
|
|
|
|
|
|
|||
|
|
|
X1(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T p+ |
1 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
koc |
|
|
|
|
|
|
|
|
|
k |
1 |
|
|
|
|
|
T |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
где |
k |
1 |
= |
|
|
и T |
= |
|
|
|
. |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
рис. 50 |
|
|
|
|
|
1− kkoc |
1 |
|
|
1 |
− kkoc |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
2.1. |
Если kk |
|
|
>1, то |
характеристическое |
уравнение |
Tλ +1= 0, |
|
|
T |
λ +1= 0, где |
|||||||||||||||||||
oc |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1− kkoc |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
λ = −1−Tkkoc , имеет положительный вещественный корень, следовательно имеем расходящийся
(неустойчивый) процесс.
2.2.Если kkoc < 1, то корень характеристического уравнения отрицателен, следовательно
полученное апериодическое звено остается устойчивым. При этом возрастает как коэффициент усиления (передачи) звена, так и его постоянная времени, т.е. быстродействие звена уменьшается.
Структурные преобразования
В результате разбиения САУ на типовые звенья направленного действия и получения их передаточных функций, составляется структурная схема всей системы.
Структурная схема – это диаграмма прохождения сигналов управления и их преобразования в САУ. Структурная схема – это математическая модель системы.
Структурные схемы для реальных САУ имеют сложный и запутанный вид. С целью упрощения структурной схемы или приведения ее к более удобному виду, можно производить структурные преобразования по определенным правилам:
Правила преобразования структурных схем
1. Преобразование последовательного соединенных звеньев. |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
x1(p) |
|
|
|
x2(p) |
|
|
x3(p) |
|
x1(p) |
|
|
? |
x3(p) |
x |
2 (p) = x1(p)W1(p), |
||||||||||||||||
|
|
|
W1(p) |
|
W2(p) |
|
|
W2(p) |
|
|
|
|
|
|
|
(1) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
3 |
(p) |
= x |
2 |
(p)W |
2 |
(p). |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
рис. 51 |
|
|
|
|
|
|
|
|
|
|
Решая |
|
(1) |
|
совместно, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
получим |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
x3(p) = x1(p) W1(p)W2 (p) или передаточная функция двух последовательно соединенных звеньев |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
W(p) = |
x3(p) |
= W |
(p)W |
(p). |
|
|
|
|
|
|
|
|
|
|
(2) |
|
||||||||
|
|
|
|
|
|
|
|
x (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Итак, |
|
при n последовательно соединённых звеньев с передаточными функциями Wi (p) (i = |
|
), |
||||||||||||||||||||||||||||
|
1,n |
|||||||||||||||||||||||||||||||
результирующая передаточная функция равна |
произведению |
передаточных |
функций |
отдельных |
||||||||||||||||||||||||||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
звеньев: |
W(p) = ∏Wi (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
i=1
32

2. Преобразование параллельного соединенных звеньев.
W1(p) |
x2(p) |
x1(p) |
x4(p) |
W2(p) |
x3(p) |
|
рис. 52 |
Решая (1) совместно, получим
|
|
|
|
|
? |
|
|
x2 |
(p) = x1(p)W1 |
(p), |
|
|
||
|
|
|
|
|
|
x4(p) |
x3 |
(p) = x1(p)W2 |
(p), |
|
(1) |
|||
|
|
|
|
x1(p) |
W(p) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x4 |
(p) = x2 (p) + x3 (p). |
|
) |
|||
|
|
|
|
|
|
|
|
|
||||||
x |
4 |
(p) = x (p)W (p)+ x (p)W (p) = x (p) W (p)+W (p) |
||||||||||||
|
1 |
1 |
1 |
2 |
1 |
( 1 |
|
2 |
|
|||||
или |
|
|
|
|
W(p) = |
|
x4 (p) |
= W (p) +W (p). |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x1(p) |
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким |
образом, |
передаточная функция n |
параллельно |
соединенных звеньев |
равна |
сумме |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
передаточных функций отдельных звеньев: |
W(p) = ∑Wi (p). |
|
|
|
|
|
|
||||||||||||||||||||||||||
3. Звено, охваченное обратной связью: |
|
|
|
|
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
3.1. ООС. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
|
|
|
||||||
x1(p) |
|
x2(p) |
|
|
|
|
x3(p) |
|
|
x1(p) |
|
|
|
x (p) |
x2 |
(p) = x1(p) − x4 |
(p), |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
W1(p) |
|
|
|
|
|
|
|
|
|
|
W(p) |
3 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3 (p) = x2 (p)W1(p), |
(1) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
x4(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4 (p) = x3 (p)Woc (p). |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Woc(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
рис. 53 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Решая (1) относительно x3(p) и x1(p), получим: |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) = |
x3(p) |
|
= |
|
W1(p) |
|
; |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x (p) |
1 |
+W (p)W (p) |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
oc |
|
|
|
|
|
|||
3.2. ПОС. Проводя аналогичные рассуждения, получим: |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) = |
|
|
|
|
W1(p) |
; |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1−W (p)W (p) |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
oc |
|
|
|
|
|
|
|
3.3. Частный случай: при единичной ОС.
x1(p) |
x2(p) |
|
x3(p) |
|
|
|
x1(p) |
? |
x3(p) |
|
W (p) |
||||||
W1(p) |
|
W(p) |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
W(p) = |
1 |
. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1±W (p) |
||||
+ |
|
– |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||
|
|
|
|
|
|
|
|
|
|
|
Причём знак ”+” соответствует |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
рис. 54 |
|
|
|
ООС. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знак ”–” соответствует ПОС. |
||
Пример:
x1(p) |
x2(p) |
|
x3(p) |
|||
W1(p)=k1/p |
||||||
|
|
|
|
|
||
|
|
|
|
|
|
|

 W2(p)=k2
W2(p)=k2 
рис. 55
1 1
обозначив k = k2 и T = k1k2 , получим
|
|
|
|
|
|
W1(p) |
|
|
|
|
|
|
|
|
|
k1 |
|
|
||||||
W3 |
(p) = |
|
|
|
|
|
|
|
|
= |
|
|
|
|
p |
= |
||||||||
1 |
+W |
(p)W |
|
(p) |
|
|
+ |
|
k1k2 |
|||||||||||||||
|
|
|
|
1 |
|
|
||||||||||||||||||
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
= |
|
k1 |
|
|
|
:k1k2 |
= |
|
|
|
k2 |
|
, |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
p + k1k2 :k1k2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
p +1 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
k1k2 |
|
|
|
|
|
|
|||||||||||||
W (p) = |
|
|
|
k |
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
3 |
|
Tp+1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
33

Таким образом, интегрирующее звено, охваченное безынерционной обратной связью, эквивалентно типовому апериодическому звену, т.е. уже не является интегрирующим.
Правила переноса сигнала
В общем случае структурные схемы могут иметь различного рода перекрещивающиеся связи, поэтому для приведения структуры к одноконтурной – удобной для исследования, разработаны правила переноса сигналов из одной точки структуры в другую:
1. При прямом переносе сигнала через ПФ W1:
x1(p)  W1(p) x2(p)
W1(p) x2(p)
x1(p) x2(p)= x1(p)W1(p).
рис. 56 2. При обратном переносе сигнала через ПФ W1:
x1(p) |
|
x2(p) |
|||
W1(p) |
|||||
|
|
|
x2(p)= x1(p)W1(p). |
||
|
|
|
|
||
|
|
|
|
||
|
|
|
|
||
|
|
|
x2(p) |
||
рис. 57 3. При прямом переносе суммирующего звена:
|
|
x2(p) |
|
x4(p) |
|
|
|
|||
|
|
|
|
|
|
|||||
x1(p) |
|
|
x3(p) |
|
|
|
|
|||
|
|
|
|
|
|
|||||
W1(p) |
|
|
|
|||||||
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4(p)= (x1(p) – x2(p)) W1(p). |
рис. 58 |
||||||||
4. При обратном переносе суммирующего звена:
x3(p)
x1(p) |
|
W1(p) |
x2(p) |
|
|||
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1(p)= x2(p) 1/ W1(p). 1/W1(p)
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x1(p) |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
x1(p) |
|
|
|
|
|
|
|
|
|
x2(p) |
||||
|
|
|
|
|
W1(p) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
x1(p) |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
W1(p) |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2(p) |
|
|
|
|
x2(p) |
||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
W1(p) |
|
||||
x1(p) |
|
|
|
|
|
|
|
|
|
x4(p) |
|||||
|
W1(p) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4(p)= x1(p) W1(p) – x2(p) W1(p).
x3(p)
1 W1(p)
|
x1(p) |
|
|
|
|
x2(p) |
|
|
|
x4(p) |
|
|
x1(p) |
|
|
|
|
|
|
x4(p) |
|||||||||
|
|
W1(p) |
рис. 59 |
W1(p) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x4(p)= x1(p)W1(p) – x3(p). |
x4(p)=[x1(p) – x3(p)/W1(p)] W1(p). |
|||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||
5. |
|
|
|
|
|
|
|
|
|
|
x2(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x3(p) |
||||||||||||
|
|
|
|
|
x1(p) + |
|
|
– x3(p) |
|
x1(p) |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
+ |
|
– |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
x3(p) = x1(p) ± x2 (p). |
|
x2(p) |
|
|
+ |
|
|
x1(p) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рис. 60 |
x1(p) = x3(p) µ x2 (p). |
||||||||||||
6. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
34

x1(p) |
|
x3(p) |
|
|
x1(p) |
x3(p) |
||||
+ |
|
– |
|
|
|
|
+ |
|
– |
|
|
||||||||||
|
|
|
|
|
|
|||||
|
|
|
|
|
||||||
x2(p) |
|
|
+ |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
|
||
x3(p)= x1(p) ± x2(p). |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
x3(p) |
|
|||||||
|
|
|
|
|
|
|||||
|
|
|
рис. 61 |
|
||||||
Замечание: 1) Структурные преобразования можно производить только в том случае, если анализ динамической системы производится при нулевых начальных условиях. В противном случае структурные преобразования приводят к потере начальных условий и погрешностям при дальнейшем анализе.
2) Структурные преобразования лишены физического смысла.
Передаточные функции систем по управляющему и возмущающему воздействиям
|
|
|
|
F(p) |
|
|
G(p) |
E(p) |
x1(p) |
x2(p) |
x3(p) |
W3(p) |
x(p) |
|
|
W1(p) |
W2(p) |
|
|
|
|
|
|
рис. 62 |
|
|
|
|
E(p) |
– изображение ошибки системы; |
|
|
|
|
|
G(p) |
– управляющий сигнал; |
|
|
|
|
|
F(p) |
– возмущение. |
|
|
|
|
Запишем уравнения по структуре (рис.62)
E(p) = G(p) − x(p),
x1(p) = E(p) W1(p), x2 (p) = x1(p) W2 (p), x3 (p) = x2 (p) − F(p),
x(p) = x (p) W (p).
3 3
Решая систему (1) относительно x(p), |
G(p) и F(p), получим |
|
||||||||||
|
W1(p) W2 (p) W3 (p) |
|
|
W3 (p) |
F(p). |
|||||||
x(p) = |
|
|
|
|
G(p) − |
|
|
|
||||
1+W |
(p) W |
(p) W (p) |
1+W |
(p) W |
(p) W (p) |
|||||||
Обозначим |
1 |
2 |
3 |
|
|
1 |
2 |
3 |
|
|||
|
|
W1(p) W2 (p) W3(p) |
|
|
|
|
|
|
||||
W (p) = |
|
|
|
– передаточная функция по управлению. |
||||||||
|
|
|
||||||||||
y |
|
1 |
+W1(p) W2 (p) W3(p) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||||
(1)
(2)
WF (p) = |
|
|
W3(p) |
|
– передаточная функция по возмущающему воздействию. |
|
1 |
+W1(p) W2 (p) W3 |
(p) |
||||
|
|
|||||
W1(p) W2 (p) W3(p) =Wp (p) |
– есть передаточная функция разомкнутой системы. Чтобы |
|||||
получить её необходимо мысленно разорвать контур обратной связи (волнистые линии на рис.62) и место разрыва считать одновременно входом и выходом системы.
|
Wp (p) |
W (p) |
|
|
x(p) = |
|
G(p) − |
3 |
F(p). |
1+Wp (p) |
1+Wp (p) |
|||
35
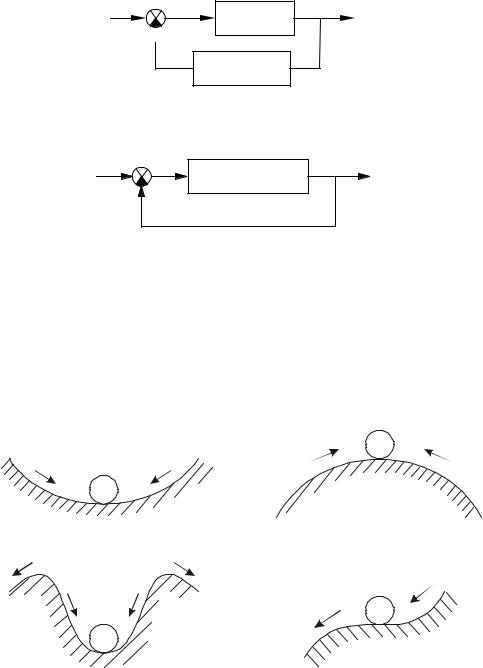
При совместном действии на систему G(p) и F(p) исследование ведется отдельно по каждому
воздействию. Суммарный результат получается алгебраическим сложением всех результатов. Это справедливо лишь для линейных систем.
При исследовании систем стабилизации в качестве исходной служит передаточная функция WF (p) по возмущению, тогда структура преобразуется к виду (рис.63).
F(p) |
X(p) |
|
W3(p) |
 x2(p)
x2(p)
W1(p)W2(p)
рис. 63
Если анализируется следящая система, то за исходную принимается ПФ Wy (p) по управлению при
F(p) = 0 (рис.64).
G(p) |
X(p) |
|
W1(p)W2(p)W3(p) |
рис. 64
Для того, чтобы получить характеристическое уравнение системы достаточно приравнять нулю знаменатель ПФ замкнутой системы.
Проблема устойчивости в САУ
Устойчивость – это свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Пример:
1) |
2) |
устойчивое |
неустойчивое |
3) |
4) |
устойчивое в малом |
полуустойчивое |
и неустойчивое в большом |
|
Рис.65
Устойчивость является важнейшим качественным свойством систем управления. Любая САУ создается таким образом, чтобы её основной режим работы был устойчивым.
Рассмотрим линейную САУ, которая описывается системой дифференциальных уравнений:
& |
n |
, u R |
m |
. |
(1) |
x = Ax+ Bu, x R |
|
|
|||
Основным режимом её работы является статический режим или состояние равновесия, когда
& |
(2) |
x = 0. |
Решая (1) с учетом (2)
36