

Лаб №7
.docxМИНОБРНАУКИ РОССИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
«ЛЭТИ» ИМ. В.И. УЛЬЯНОВА (ЛЕНИНА)
Кафедра КСУ
отчет
по лабораторной работе №7
по дисциплине «Проектирование оптимальных систем управления»
Тема: Задача максимального быстродействия. Объект 3 порядка
Вариант 1
Санкт-Петербург
2018
Решение задачи
Задание: Необходимо определить набор моментов переключения знака управляющего воздействия, который необходим для перевода объекта из состояния [10 0 0] в состояние [0 0 0], а также определить момент выключения управления.
Модуль управляющего воздействия не может превосходить 1.
Кроме определения моментов переключения необходимо построить графики зависимости состояний объекта и управления от времени, соответствующие оптимальному переходу из начального состояния в конечное.
|
Вариант |
Объект управления |
|
1 |
|

Решение задач управления по критерию максимального быстродействия резко усложняется с повышением порядка дифференциальных уравнений, описывающих объект управления.
Основным методом решения задачи максимального быстродействия для объектов, описываемых дифференциальными уравнениями выше второго порядка, является поиск моментов переключения. Для случая объекта 3 порядка, собственные числа которого являются вещественными (вычисление корней ХП приводится дальше в тексте работы) задача поиска может быть сформулирована следующим образом:
Требуется найти такие значения параметров
 ,
,
 и
и
 ,
где
,
где
 и
и
 моменты переключения знака управляющего
воздействия, а
моменты переключения знака управляющего
воздействия, а
 - момент выключения управления, при
которых расстояние между изображающей
точкой, соответствующей моменту
- момент выключения управления, при
которых расстояние между изображающей
точкой, соответствующей моменту
 и требуемым конечным состоянием объекта,
было бы минимальным. Практика выполнения
расчетов показывает, что зависимость
точности обеспечения заданных конечных
условий от набора моментов переключения
носит очень сложный характер и содержит
большое количество локальных экстремумов.
В таких условиях существенно возрастает
значение выбора начальной точки поиска.
и требуемым конечным состоянием объекта,
было бы минимальным. Практика выполнения
расчетов показывает, что зависимость
точности обеспечения заданных конечных
условий от набора моментов переключения
носит очень сложный характер и содержит
большое количество локальных экстремумов.
В таких условиях существенно возрастает
значение выбора начальной точки поиска.
Одним из возможных способов определения
начальной точки поиска является решение
промежуточной задачи максимального
быстродействия для усеченного объекта
2 порядка. Возможность рассмотрения
усеченной задачи обусловливается тем,
что уравнения для
 и
и
 не зависят от
не зависят от
 .
.
Объект управления описывается следующими уравнениями:







где
 ,
,
 ,
,
 - состояния объекта управления,
- состояния объекта управления,
 - управляющее воздействие,
- управляющее воздействие,
 - момент времени перевода объекта в
конечное состояние.
- момент времени перевода объекта в
конечное состояние.
Собственными числами матрицы А являются корни характеристического полинома:
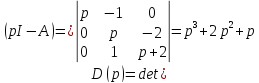
Характеристический полином имеет
следующие корни:

Собственные числа рассматриваемого
объекта являются вещественными,
следовательно, в соответствии с теоремой
об
 интервалах, для управления этим объектом
управляющее воздействие должно быть
максимально по модулю и менять знак 2
раза.
интервалах, для управления этим объектом
управляющее воздействие должно быть
максимально по модулю и менять знак 2
раза.
Очевидно, также, что оптимальной
траектории с заданными граничными
условиями на плоскости
 соответствует замкнутая кривая, на
которой находятся две точки переключения.
соответствует замкнутая кривая, на
которой находятся две точки переключения.
На первом этапе решения задачи выберем
первую точку переключения произвольно
 =10.
При выбранном значении
=10.
При выбранном значении
 момент второго переключения
момент второго переключения
 и момент выключения управления
и момент выключения управления
 могут быть однозначно определены с
помощью построения линии переключения
в плоскости
могут быть однозначно определены с
помощью построения линии переключения
в плоскости
 методом обратного времени.
методом обратного времени.
Порядок определения моментов следующий:
-
производим построение линии переключения в фазовой плоскости методом обратного времени;
-
произвольно выбираем момент переключения t_1;
-
момент переключения t_2 подбираем так, чтобы соответствующая этому значению траектория прикоснулась к линии переключения (или была достаточно близка к ней);
-
момент выключения управления Т подбираем так, чтобы в этот момент времени фазовая траектория пришла в требуемую конченую точку x_2=0 x_3=0
Ниже представлены MATLAB скрипты, с помощью которых организуется подбор значений времени второго переключения и времени отключения управления.
Файл main7.m:
global t1 t2 T
% Построение линии переключения в плоскости x2x3 c
% использованием обратного времени
% окончание временного интервала выбрано с учетом масштаба ФТ
[t,x] = ode45('odefun7', [0 0.5], [0 0 0]);
figure
plot(x(:,2),x(:,3),'r')
hold on
% Построение траектории из нач. состояния в прямом времени
t1 = 6.06;
t2 = 7.549;
T = 15.0;
[t,x] = ode45('odefun7_2',[0 T],[10 0 0]);
plot(x(:,2),x(:,3),'b')
xlabel('x2')
ylabel('x3')
grid
text(-1.0,0.8);
text(-1.92,0.2);
% построение графиков переходных процессов
figure
plot(t, x(:,1), t, x(:,2),'.-.', t, x(:,3),'.')
grid
xlabel('t')
ylabel('x1,x2,x2')
legend('x1','x2','x3')
Файл odefun7.m:
function f = odefun7(t,x)
f = [-x(2);-x(3);x(2)+2*x(3)+1];
Файл odefun7_2.m:
function f = odefun7_2(t,x)
global t1 t2 T
if t < t1
u = -1;
elseif t < t2
u = 1;
else
u = -1;
end
if t > T
u = 0;
end
f = [x(2);x(3);-x(2)-2*x(3)+u];
Поскольку момент
 был выбран произвольно конечное состояние
объекта управления по состоянию
был выбран произвольно конечное состояние
объекта управления по состоянию
 будет отличаться от заданного. Обозначим
его
будет отличаться от заданного. Обозначим
его
 .
.
На рисунке 1 представлена фазовая
плоскость, на которой изображены линия
переключения и траектория перехода
объекта управления в точку промежуточного
финиша [ 0 0]. На рисунке 2 изображены графики
переходных процессов.
0 0]. На рисунке 2 изображены графики
переходных процессов.
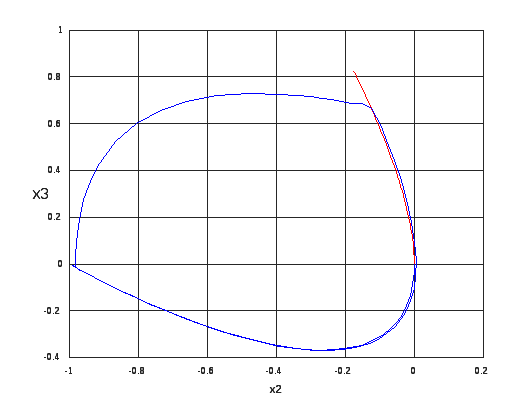
Рисунок 1 – Фазовая траектория перехода ОУ в промежуточное состояние
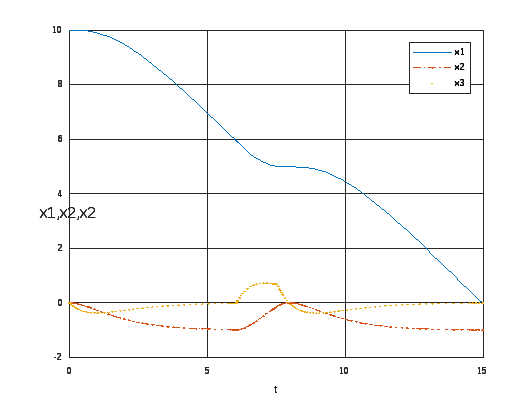
Рисунок 2 – Графики переходных процессов
Выполненные с помощью программы расчеты показали, что набор моментов переключения t1=6.06, t2=7.549 T=15.0 позволяет перевести объект в точку промежуточного финиша с координатами [-0.03587 -0.002721 -0.02901].
Полученный набор точек переключения и координаты точки промежуточного финиша использовались для уточнения набора точек переключения и координат точки промежуточного финиша методом поиска, реализованного в следующей программе.
Файл main7_2.m:
% переменная x используется для наблюдения за конечным положением ПС
global x
t0 = [6.06 7.549 15.0]
T = fminsearch('fmsfun7_2_1',t0)
Файл fmsfun7_2_1:
function f = fmsfun7_2_1(T)
global TT x
TT = T;
[t,x] = ode45('odefun7_2_1',[0 T(3)],[10 0 0]);
xf = [-0.03587 -0.002721 -0.02901];
f = (x(length(t),1)-xf(1))^2+(x(length(t),2)-xf(2))^2+(x(length(t),3)-xf(3))^2;
%plot(x(:,2),x(:,3),'b')
plot(t,x)
pause(0.1)
Файл odefun7_2_1.m:
function f = odefun7_2_1(t,x)
global TT
if t < TT(1)
u = -1;
elseif t < TT(2)
u = 1;
else
u = -1;
end
if t > TT(3)
u = 0;
end
f = [x(2);x(3);-x(2)-2*x(3)+u];
На первом шаге использовался набор точек переключения t0 = [6.06 7.549 15.0] и точка промежуточного финиша xf = [-0.03587 -0.002721 -0.02901] Результатом работы программы был уточненный набор точек переключения [6.06 7.549 15.0].
На втором шаге использовался набор
точек переключения, полученный на первом
шаге, и новые координаты точки
промежуточного финиша
 .
В результате второго шага получен набор
точек переключения t
= [6.06 7.5486 15.0000], обеспечивающий перевод
объекта в конечную точку с приемлемой
точностью.
.
В результате второго шага получен набор
точек переключения t
= [6.06 7.5486 15.0000], обеспечивающий перевод
объекта в конечную точку с приемлемой
точностью.
На рисунке 3 изображены графики переходных процессов, соответствующие оптимальному переходу из начального состояния в конечное.
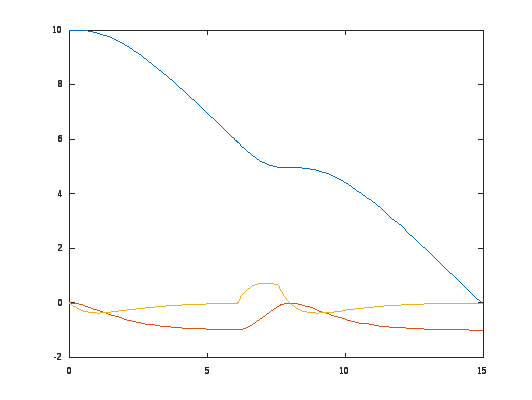
Рисунок 3 – Окончательные графики переходных процессов
Чтобы построить графики зависимости состояний объекта и управления от времени был написан m-файл:
Файл ut.m:
uu = [];
tt = [];
TT = [6.06 7.549 15.0]
for t = 0:0.01:10
if t < TT(1)
u = -1;
elseif t < TT(2)
u = 1;
else
u = -1;
end
if t > TT(3)
u = 0;
end
uu = [uu u];
tt = [tt t];
end
plot(tt,uu,'b')
grid on
xlabel('t'),ylabel('u');
График зависимости управляющего воздействия от времени представлен на рисунке 4.
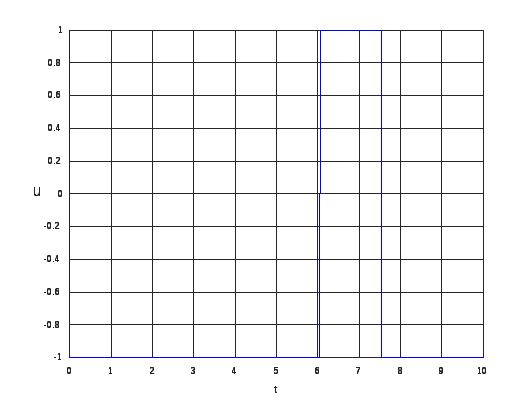
Рисунок 4 - Зависимость управляющего воздействия от времени