

Учебные пособия и литература / Пособие по СДМ Курсовой проект
.pdfФедеральное агентство железнодорожного транспорта Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования «ПЕТЕРБУРГСКИЙ
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Подъемно-транспортные, путевые и строительные машины»
КИНЕМАТИЧЕСКИЙ И ПРОЧНОСТНОЙ РАСЧЕТ, РАБОЧЕГО ОБОРУДОВАНИЯ ГИДРАВЛИЧЕСКИХ ЭКСКАВАТОРОВ.
Учебное пособие для выполнения курсового проекта по дисциплине «Строительные и дорожные машины»
Санкт-Петербург ПГУПС
2013
1
УДК 69.002.51(075.3) ББК 38.6-5
Кинематический и прочностной расчет, рабочего оборудования гидравлических экскаваторов: учебное пособие для выполнения курсового проекта по дисциплине « Строительные и дорожные машины». Д.Е. Попов
– Спб.: Петербургский государственный университет путей сообщения,
2013 – 60 с.
Учебное пособие для студентов университета всех форм обучения по специальности 190205.65 – Подъемно-транспортные, строительные, дорожные машины и оборудование».
УДК 69.002.51(075.3) ББК 38.6-5
©Петербургский государственный университет путей сообщения, 2013
2
Введение
Выполнение кинематического расчета стрелового оборудования гидравлических экскаваторов, с помощью аналитико-графического метода
очень трудоемкая работа. |
При этом |
у студента |
довольно ограниченный |
||
временной интервал на |
выполнение |
курсового проекта. |
Современные |
||
средства CAD/CAE |
проектирования |
позволяют |
использовать более |
||
совершенные способы |
в учебном процессе, увеличить точность расчетов |
||||
и объем результатов, |
а так же позволяют использовать |
дистанционную |
|||
групповую работу над проектом.
В данном пособии рассмотрен общий подход к расчету стрелового оборудования с использованием системы CAD SolidWorks.
1. Содержание и последовательность выполнения кинематического и прочностного расчета.
Кинематический и прочностной анализ рабочего оборудования гидравлических одноковшовых экскаваторов состоит из следующих этапов:
1Выбрать тип и форму рабочего органа.
2Выбрать кинематическую схему стрелового оборудования.
3Определить по одной из формул силы сопротивления резания.
4Выбрать форму деталей стрелового оборудования и сделать 3-d модели.
5Произвести силовые и прочностные расчеты в программной среде
SolidWorks.
Параметры для проектирования выдаются преподавателем в виде задания или выбираются студентом самостоятельно на основе предложенных диапазонов и анализа научно-технической литературы.
2. Общие сведения о функционировании рабочего оборудования прямая и обратная лопата.
В процессе рабочего цикла гидравлический экскаватор разрабатывает грунт, перемещает к месту выгрузки, выгружает и возвращает рабочее оборудование в забой.
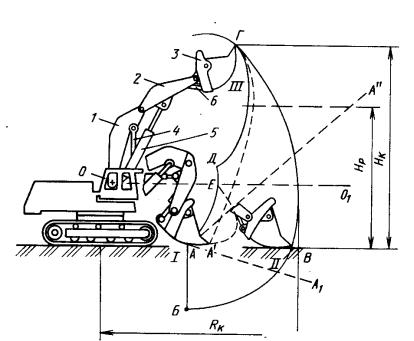
Экскаватор, оборудованный обратной лопатой (рис. 1.) копает грунт движением ковша в сторону машины. Начинается копание обычно при наиболее удаленном от экскаватора положении I ковша на максимальном радиусе R копания. Для этого в зависимости от исходного положения оборудования, например, при нахождении его в положении IV втягиваются
3
штоки гидроцилиндра 6 стрелы, 5 рукояти и 4 ковша. При квалифицированном управлении машиной перевод ковша в положение I совмещается с поворотом в забой оборудования после выгрузки.
Копание грунта на начальной стадии работы машины в забое может выполняться при повороте ковша 3 относительно рукояти, когда зубья перемещаются по траектории А-A1 при повороте рукояти с ковшом относительно стрелы 1 по траектории А-Б или при совмещении движений ковша и рукояти. По мере выработки грунта в забое начало копания (точка А) смещается вниз до уровня установки машины к точке А' (положение II). Здесь копание чаще выполняется поворотом рукояти с ковшом относительно стрелы и опусканием последней.
Процесс копания в каждом из этих случаев продолжается до заполнения ковша грунтом. После этого рабочее оборудование переводится в положение IV, и платформа поворачивается на угол обычно 70—110° для выгрузки грунта из ковша в отвал или транспортные средства. Выгружается грунт после перевода оборудования в положение V. Разгрузив ковш, платформу поворачивают в обратном направлении в забой, и цикл работы машины повторяется.
Копание при одной стоянке машины в забое заканчивается после выработки в нем грунта на глубину Нк — в границах области АГВА, определяемой частью зоны возможного перемещения зубьев ковша ниже уровня площадки, на которой находится экскаватор. Полная зона, называемая зоной досягаемости ковша, значительно больше области АГВА. При нижнем копании зубья ковша могут находиться и в области ГБВГ (положение III). Однако здесь копание не производится ввиду невозможности наблюдения за ковшом из кабины машины.
Выше площадки, где установлена машина, зону досягаемости дополняет область АДСВА. Однако разработка грунта здесь и в области АГВА одновременно возможна только в забоях с малым объемом земляных работ. При значительном объеме, выполнение второго связано с передвижениями машины, грунт может разращиваться только раздельно, так как после выработки грунта верхней области машина должна передвинуться в сторону забоя, а при выработке в нижней области — в обратную сторону. Знание полной зоны досягаемости ковша важно при установке на обратной лопате вместо ковша других видов рабочих органов, например, грейфера, рыхлителя, гидромолота.
После выработки грунта в пределах зоны досягаемости и экскаватор при нижнем копании отодвигается на 1,5—2 м от забоя и рабочий процесс продолжается. [4]
4

Рис.1 Схема рабочей зоны экскаватора оборудованного ковшом обратная лопата.
Экскаватор, оборудованный прямой лопатой (рис.2), копает большей частью выше уровня стоянки машины. Начинается копание тогда, когда ковш находится вблизи от гусениц (положение I) Для перевода ковша, например из положения III, стрела 1 и рукоять 2 с ковшом 3 поворачиваются по часовой стрелке и достигается втягиванием штоков гидроцилиндров 4 стрелы и рукояти. Отдельно эту операцию практически не проводят. Опытный машинист, как правило, выполняет ее в процессе поворота машины в забой.
Процесс копания на начальной стадии образования и разработки забоя может осуществляться перемещением зубьев ковша по траектории А—А1 . После образования забоя площадка, на которой установлена машина, располагается горизонтально. С одной установки на этой площадке экскаватор может разрабатывать грунт в пределах зоны АВГДЕА досягаемости ковша. Это он осуществляет за несколько рабочих циклов.
Анализируя конфигурацию зоны досягаемости, видно что по мере разработки забоя наблюдается ускоренное образом навеса грунта в нем. На максимальном радиусе копания навес не образуется только ниже горизонтали О—О1 проведенной через ось пяты стрелы. При разработке связного грунта в пределах высоты Нк подъема ковша (точка Г) размер навеса достигает примерно, 0,3 Нк . Сбить этот навес экскаватор, не передвинувши не может, так как все траектории зубьев ковша сходятся в одной точке Г. Оставлять навес по условиям техники безопасности так нельзя. Учитывая это, обычно реальную высоту забоя Нр принимают
5
равной около 0,7Нк.
В течение рабочего цикла процесс копания ведется различно. Наиболее часто при работе в связном грунте копание осуществляется по так называемой традиционной схеме. В этом случае зубья ковша первоначально перемещаются по траектории А—А' на толщину стружки, а затем ковш идет вверх по траектории А/ - Г. Заглубление ковша в грунт и снятие им стружки нужной толщины при этом достигается выдвижением и втягиванием штоков гидроцилиндров 5 рукояти и 4 стрелы. Немаловажное значение при этом имеет и поворот ковша относительно рукояти, осуществляемый с помощью гидроцилиндра 6. Поворот ковша позволяет существенно менять угол резания и снижать сопротивление копанию.
Рис.2 Схема рабочей зоны экскаватора прямая лопата.
При хорошем разрыхлении грунта в забое последний перед машиной имеет пологий откос (по траектории А—А// ). В этом случае копание выполняется по схеме, близкой к имеющейся у погрузчика при его работе. Ковш значительно, примерно на 2/3 высоты его передней стенки, заглубляется в грунт, затем поворачивается влево относительно рукояти и идет вверх по траектории АА'—Е. Это достигается на первой стадии втягиванием штоков гидроцилиндров 4 стрелы и 6 ковша и выдвижением штока рукояти 5, а затем на второй стадии выдвижением штоков гидроцилиндров 4 и 6. После заполнения ковша грунтом последний подтягивается к машине, примерно, на глубину его заглубления в грунт при копании, и рабочее оборудование переводится в положение III. Последнюю операцию опытный машинист чаще совмещает с операцией поворота ковша на выгрузку. В конце поворота ковш обычно останавливается и разгружается. После этого, машина совершает обратный
6
поворот рабочего оборудования в забой, и цикл работы в забое повторяется. [4]
Разновидности стрелового оборудования гидравлических экскаваторов.
В стреловом оборудовании «прямая лопата» (рис. 3) применяют два основных вида разгрузки ковшей.
Рис. 3 Стреловое оборудование «прямая лопата».
1 - ковш; 2 - тяга; 3 - гидроцилиндр поворота ковша; 4 - рукоять; 5 - гидроцилиндр поворота рукояти; 6 - гидроцилиндр подъема стрелы; 7 - стрела; 8 - поворотная платформа;
Это разгрузка ковша путем его поворота и путем раскрытия челюсти ковша (рис.4). Третий вид разгрузки – разгрузкой через открывающееся днище, чаще всего применяется на экскаваторах с канатно-блочной подвеской стрелы.
7
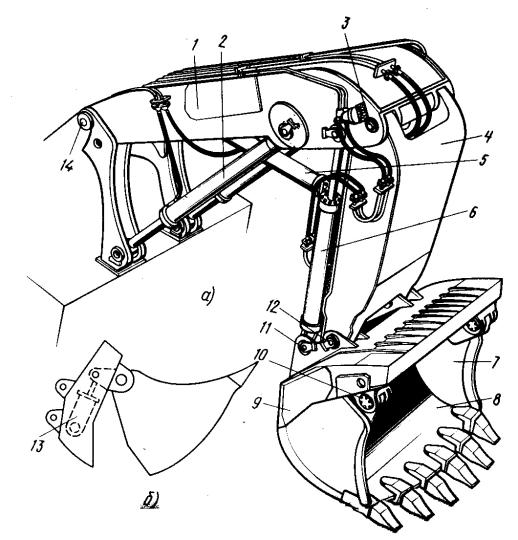
Рис. 4 Стреловое оборудование «прямая лопата» с челюстным ковшом.
1- стрела; 2 - гидроцилиндр подъема стрелы; 3 - ось; 4 – рукоять; 5- гидроцилиндр поворота рукояти; 6 – гидроцилиндр поворота ковша;
7- стенка ковша; 8 – днище ковша; 9 – задняя стенка ковша; 10,11,12,13,14шарнир.
Конструктивными особенностями стрелового оборудования обратная лопата является соединительные шарниры стрелы с рукоятью, стрелы с гидроцилиндрами подъема стрелы и стрелы с поворотной платформой. В зависимости от длины стрелы и нагрузок на нее для повышения изгибной прочности нижнюю часть стрелы (опорную) и верхнюю (соединительную с рукоятью) выполняют в виде двухрожковых вилок. Для равномерной передачи и распределения нагрузок от гидроцилиндров подъема стрелы применяют цельную литую втулку или две втулки, установленные на боковых стенках стрелы. Для первоначального варианта можно использовать местное усиление боковых стенок в виде утолщения стенок стрелы. После усвоения базовых навыков, можно произвести более детальное моделирование данных узлов.
8
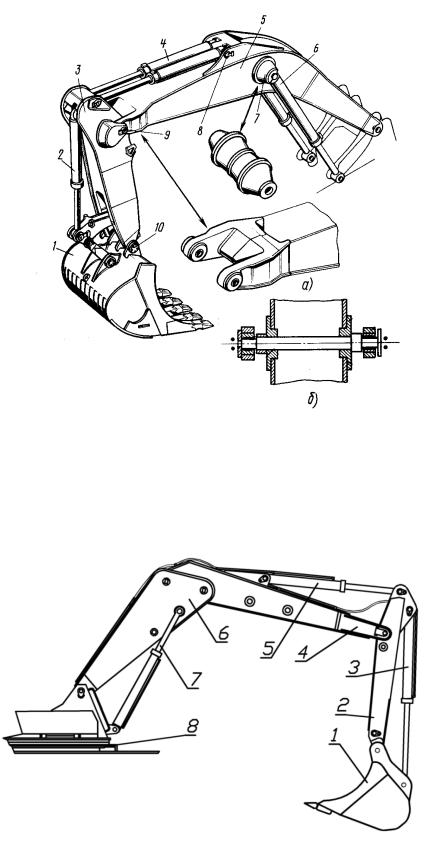
Рис.5 Моноблочная стрела с ковшом обратная лопата.
а) конструкция стрелы. б) разновидность соединения гидроцилиндров подъема стрелы с помощью коротких втулок.
1- ковш; 2- гидроцилиндр поворота ковша; 3- рукоять; 4- гидроцилиндры поворота рукояти; 5- стрела; 6- гидроцилиндры подъема стрелы; 7 – втулка крепления гидроцилиндров; 8 – гидролиния; 9 – соединительный палец стрелы и рукояти. 10 – соединительный палец рукояти и ковша.
Рис. 6 Соединение верхней и нижней секции стрелы с помощью двух пальцев. 1- ковш; 2 - рукоять; 3 - гидроцилиндр поворота ковша; 4 – верхняя часть стрелы; 5-
гидроцилиндр поворота рукояти; 6 – нижняя часть стрелы; 7 – гидроцилиндр подъема стрелы; 8- поворотная платформа;
9
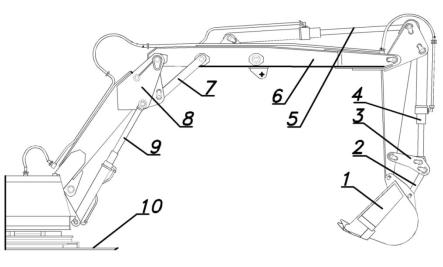
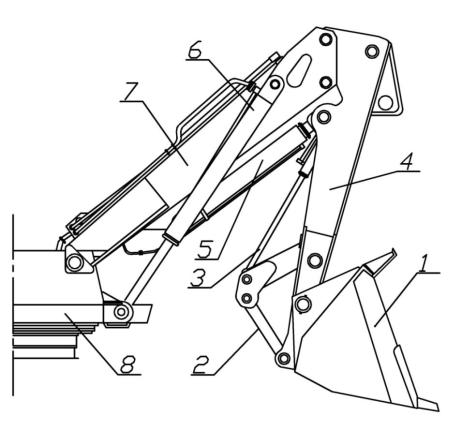
Рис.7 Соединение нижней и верхней частей стрелы с помощью раскоса.
1- ковш; 2 - тяга; 3 - коромысло; 4 – гидроцилиндр поворота ковша; 5- гидроцилиндр поворота рукояти; 6 – верхняя часть стрелы;
7- раскос; 8 – нижняя часть стрелы; 9 – гидроцилиндр подъема стрелы; 10неповоротная платформа;
3. Кинематические схемы управления стреловым оборудованием.
Наиболее распространенные кинематические схемы стрелового оборудования экскаваторов представлены на рис.8
В случае нижнего расположения гидроцилиндра подъема стрелы используются следующие компановки данного соединения:
-один гидроцилиндр, который упирается в стрелу снизу;
-в стреле есть вырез, в который входит шток гидроцилиндра и соединяется с осью, которая установлена на оси симметрии стрелы;
-два гидроцилиндра установленных с боку стрелы и соединенные осью,
которая проходит через сечение стрелы (ось может располагаться как на оси симметрии стрелы, так и выше ее).
10