

методички / 4041 ЭИ
.pdf4041 |
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ |
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА |
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Автоматика, телемеханика и связь на железнодорожном транспорте»
СОСТАВЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ СИСТЕМ УПРАВЛЕНИЯ РАЗЛИЧНОЙ СТРУКТУРЫ
Методические указания к выполнению практической работы по дисциплине
«Теория автоматического управления»
для студентов специальности 23.05.05 «Системы обеспечения движения поездов» специализаций «Автоматика и телемеханика на железнодорожном транспорте», «Телекоммуникационные системы и сети железнодорожного транспорта» очной формы обучения
Составитель: В. Л. Бажанов
Самара
2016
1
УДК 517.2, 62-50
Составление передаточных функций систем управления различной структуры : методические указания к выполнению практической работы по дисциплине «Теория автоматического управления» для студентов специальности 23.05.05 «Системы обеспечения движения поездов» специализаций «Автоматика и телемеханика на железнодорожном транспорте», «Телекоммуникационные системы и сети железнодорожного транспорта» очной формы обучения / составитель : В. Л. Бажанов. – Самара : СамГУПС, 2016. – 20 с.
Построение математических моделей систем управления в виде передаточных функций является одним из базовых разделов курса «Теория автоматического управления». В указаниях рассматриваются простейшие способы соединения звеньев, а также системы сложной структуры. Излагается универсальный подход к построению передаточной функции систем управления произвольной конфигурации. Сформулированы правила записи передаточной функции системы для основных видов соединения составляющих звеньев.
Методические указания содержат подборку вариантов заданий для самостоятельного решения. Успешное выполнение всего цикла заданий служит гарантией качественного усвоения изучаемого материала. В указаниях содержится перечень вопросов для самоконтроля усвоения материала.
Утверждены на заседании кафедры «Автоматика, телемеханика и связь на железнодорожном транспорте» 16 февраля 2016 г., протокол № 6.
Печатаются по решению редакционно-издательского совета университета.
Составитель: Бажанов Владимир Леонидович
Рецензенты: д. т. н., профессор, заведующий кафедрой «Электротехника» СамГУПС А. Е. Дубинин; к. т. н., профессор кафедры «АТ и С на железнодорожном
транспорте» СамГУПС В. Б. Леушин
Под редакцией составителя
Подписано в печать 17.06.2016. Формат 60.90 1/16. Усл. печ. л. 1,25. Заказ 112.
© Самарский государственный университет путей сообщения, 2016
2
СОСТАВЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ СИСТЕМ УПРАВЛЕНИЯ РАЗЛИЧНОЙ СТРУКТУРЫ
Введение
Каждая система автоматического управления представляет собой совокупность соединенных между собой функциональных элементов (звеньев).
Для анализа свойств системы управления необходимо знать ее передаточную функцию (математическую модель). Поэтому в обязательном порядке требуется умение определять передаточные функции систем различной структуры, при условии, что известны передаточные функции составляющих их звеньев. Наработка такого умения является главной целью данной практической работы.
В результате изучения материала и успешного выполнения заданий студент будет знать свойства передаточной функции, а также ее достоинства, как математической модели динамических звеньев или систем. При решении каких задач может применяться данная форма математической модели; уметь пользоваться универсальным подходом к построению передаточной функции систем управления произвольной структуры, формулировать правила записи передаточной функции для основных вариантов соединения звеньев; владеть навыками анализа структуры сложных систем управления и приемами корректного применения типовых правил при составлении передаточных функций сложных систем.
Изучаемый материал помогает студентам обрести следующие компетенции: ПК-21: умение анализировать технологический процесс эксплуатации, технического
обслуживания и ремонта систем обеспечения движения поездов как объекта управления; ПК-29: умение проводить научные исследования и эксперименты; анализировать, интерпретировать и моделировать в областях проектирования и ремонта систем
обеспечения движения поездов; ПК-30: умение составлять описания проводимых исследований и разрабатываемых
проектов, собирать данные для составления отчетов, обзоров и другой технической документации;
ПК-31: владение способами сбора, систематизации, обобщения и обработки научнотехнической информации, подготовки обзоров, аннотаций, составления рефератов, отчетов и библиографий по объектам исследования; наличием опыта участия в научных дискуссиях и процедурах защиты научных работ и выступлений с докладами и сообщениями по тематике проводимых исследований.
3

Основные теоретические сведения
Одним из основных достоинств передаточной функции W(p), как формы математической модели, является удобная линейная взаимосвязь между изображениями по Лапласу входного x(p) и выходного y(p) сигналов:
y(p)=W(p)•x(p).
Чтобы научиться определять передаточную функцию системы управления произвольной (сложной) структуры, следует сначала рассмотреть простейшие варианты соединения звеньев и выяснить для них правила записи общей передаточной функции. Простейшими являются три варианта:
-последовательное соединение;
-параллельное соединение;
-соединение в виде контура обратной связи.
Последовательное соединение звеньев
x(p) |
W1(p) |
y1(p) |
W2(p) |
y(p) |
|
|
|
||
|
|
|
|
|
Рис. 1. Система из последовательно соединенных звеньев
По определению общая передаточная функция системы W(p) представляет собой отношение:
W ( p) |
y( p) |
. |
(1) |
|
|||
|
x( p) |
|
|
Чтобы выразить W(p) через передаточные функции составляющих звеньев W1(p) и W2(p), воспользуемся взаимосвязями между их входными и выходными сигналами:
y1 ( p) W1 ( p) x( p) ; |
(2) |
y( p) W2 ( p) y1 ( p) . |
(3) |
Значение y1(p) из равенства (2) подставим в равенство (3):
y( p) W2 ( p) W1 ( p) x( p) . |
(4) |
Выразим из (4) отношение:
4

y( p) |
W ( p) W ( p) . |
(5) |
|
|
|||
x( p) |
1 |
2 |
|
|
|
|
|
Сопоставляя равенства (1) и (5), получаем искомое соотношение, связывающее передаточную функцию системы с передаточными функциями составляющих звеньев:
W(p) = W1(p)·W2(p).
Правило 1. При последовательном соединении динамических звеньев общая передаточная функция системы равна произведению передаточных функций составляющих звеньев.
Сформулированное Правило 1 справедливо для любого числа последовательно соединенных звеньев.
Параллельное соединение звеньев
x(p) |
x(p) |
|
y1(p) |
y(p) |
x(p) |
|
|
y1(p) |
y(p) |
|||
W1(p) |
W1(p) |
|||||||||||
|
x(p) |
|
y2(p) |
|
x(p) |
|
y2(p) |
|
||||
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
W2(p) |
|
|
W2(p) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
а) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
б) |
|
||||
Рис. 2. Системы с параллельным соединением звеньев
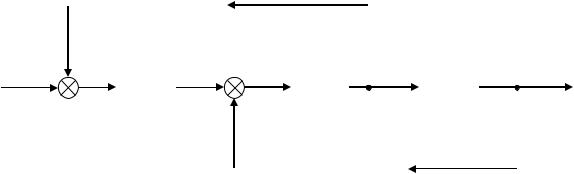
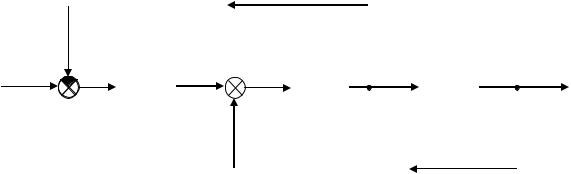
При параллельном соединении звеньев на их входы подается один и тот же сигнал. Выходные сигналы звеньев могут, как суммироваться (рис. 2,а), так и вычитаться (рис. 2,б). Знак алгебраического суммирования указывается штриховкой сектора сумматора.
Чтобы получить выражение для передаточной функции системы, следует записать соотношения для каждого ее элемента.
для сумматоров
y( p) y1 y2 ; |
(6) |
для первого звена |
|
y1 ( p) W1 ( p) x( p) ; |
(7) |
для второго звена |
|
y2 ( p) W2 ( p) x( p) . |
(8) |
Подставим (7) и (8) в соотношение (6): |
|
5 |
|

y( p) W1 ( p) x( p) W2 ( p) x( p) (W1 ( p) W2 ( p)) x( p) . |
(9) |
|||
Из формулы (9) выражается отношение, представляющее собой передаточную |
||||
функцию системы: |
|
|
|
|
|
y( p) |
W ( p) W ( p) . |
(10) |
|
|
|
|||
|
x( p) |
1 |
2 |
|
|
|
|
|
|
Следовательно, |
|
|
|
|
W(p) = W1(p) ± W2(p). |
(11) |
|||
Правило 2. При параллельном соединении звеньев общая передаточная функция системы равна алгебраической сумме передаточных функций составляющих звеньев.
Правило 2 справедливо для любого числа параллельно соединенных звеньев.
Соединение звеньев в виде обратной связи
x(p) |
x1(p) |
y(p) |
x(p) |
x1(p) |
y(p) |
|
|
W1(p) |
|
|
W1(p) |
y1(p) |
|
y(p) |
y1(p) |
|
y(p) |
|
W2(p) |
W2(p) |
|||||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
б) |
|
Рис. 3. Соединение звеньев в виде обратной связи: а – положительная ОС; б – отрицательная ОС
Соединение в виде обратной связи представляет собой контур, в котором выходной сигнал прямой цепи y(p) (звено W1(p)) возвращается по обратной цепи (звено W2(p)) и алгебраически суммируется с входным сигналом. Если знаки суммируемых сигналов одинаковы, то обратная связь (ОС) называется положительной. Если знаки разные, то имеет место отрицательная обратная связь.
Чтобы получить выражения для передаточной функции системы в виде замкнутого контура, используем прежний универсальный подход – запишем соотношения для каждого элемента системы, чтобы затем выразить отношение y(p)/x(p), определяющее искомую передаточную функцию:
для сумматора (рис. 3,а):
x1 ( p) x( p) y1 ( p) ; |
(12) |
для прямой цепи (звено W1(p)): |
|
y( p) W1 ( p) x1 ( p) ; |
(13) |
6 |
|
для обратной цепи (звено W2(p)):
y1 ( p) W2 ( p) y( p) . |
(14) |
Соотношения (12)–(14) дают возможность выполнить следующие преобразования:
подставить значение y1(p) из (14) в равенство (12):
x1 ( p) x( p) W2 ( p) y( p) ; |
(15) |
полученное x1(p) подставить в равенство (13):
y( p) (x( p) W2 ( p) y( p)) W1 ( p) . |
(16) |
После алгебраических преобразований формула (16) приводит к искомому результату:
y( p) x( p) W1 ( p) y( p) W1 ( p) W2 ( p) ; y( p) y( p) W1 ( p) W2 ( p) x( p) W1 ( p) ; y( p) (1 W1 ( p) W2 ( p)) x( p) W1 ( p) ;
y( p) |
|
W1 ( p) |
|
. |
x( p) |
1 W ( p) W ( p) |
|||
|
|
1 |
2 |
|
Таким образом, передаточная функция контура с положительной обратной связью описывается следующим выражением:
W ( p) |
W1 ( p) |
|
. |
(17) |
1 W ( p) W ( p) |
||||
|
1 |
2 |
|
|
Правило. Передаточная функция системы в виде контура с положительной ОС записывается как дробь, в числителе которой передаточная функция прямой цепи (от входа к выходу), в знаменателе – единица минус произведение передаточных функций всех звеньев контура.
В случае отрицательной ОС (рис. 3,б):
x1 ( p) x( p) y1 ( p) .
Соотношения (13), (14) остаются в силе.
Путем преобразований, аналогичных предшествующему случаю, выражение для передаточной функции контура с отрицательной ОС:
W ( p) |
|
W1 ( p) |
|
. |
|
1 W ( p) W ( p) |
|||
|
1 |
2 |
|
|
|
7 |
|
|
|
(18)
получается
(19)
Отличие от формулы (17) заключается в знаке, стоящем в знаменателе перед произведением передаточных функций контура. В этом состоит принципиальное отличие контуров с положительной и отрицательной ОС.
В общем случае правило записи передаточной функции системы в виде контура обратной связи можно сформулировать следующим образом.
Правило 3. Передаточная функция системы в виде контура ОС записывается как дробь, в числителе которой передаточная функция прямой цепи (от входа к выходу), в знаменателе – единица, алгебраически суммируемая с произведением передаточных функций всех звеньев, входящих в контур. Знак суммы противоположен знаку ОС.
При разработке систем автоуправления приходится регулярно сталкиваться с типовыми видами соединения звеньев, отличающимися от рассмотренных выше простейших видов. С некоторыми из них полезно познакомиться.
Система со свя́зными контурами обратной связи
Свя́зными называются контуры, имеющие общее звено. Структура системы со свя́зными контурами представлена на рис. 4. Оба контура с положительной обратной связью. Звено W2(p) является общим.
|
|
e(p) |
|
|
|
|
d(p) |
|
|
|
|
|
|
|
|
|
|
|
W4(p) |
|
|
|
d(p) |
|
|
|
|||||
x(p) |
|
|
|
|
|
c(p) |
|
|
|
|
|
y(p) |
|||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
a(p) |
|
|
b(p) |
|
|
|
|
|
|
|||||
|
W1(p) |
|
|
W2(p) |
|
W3(p) |
|
||||||||
|
|
|
|
|
f(p) |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(p) |
|
||
|
|
|
|
|
|
|
|
W5(p) |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||||||
|
Рис. 4. Структура системы с двумя связными контурами обратной связи |
||||||||||||||
Чтобы определить правило составления передаточной функции изображенной на |
|||||||||||||||
рис. 4 системы, запишем соотношения для каждого ее элемента: |
|
||||||||||||||
|
|
для первого сумматора: |
|
|
a( p) x( p) e( p) ; |
(20) |
|||||||||
|
|
для второго сумматора: |
|
|
c( p) b( p) f ( p) ; |
(21) |
|||||||||
|
|
для звена W1(p): |
|
|
|
|
b( p) W1( p) a( p) ; |
(22) |
|||||||
|
|
для звена W2(p): |
|
|
|
|
d( p) W2 ( p) c( p) ; |
(23) |
|||||||
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
для звена W3(p): |
y( p) W3 ( p) d ( p) ; |
(24) |
для звена W4(p): |
e( p) W4 ( p) d( p) ; |
(25) |
для звена W5(p): |
f ( p) W5 ( p) y( p) ; |
(26) |
Требуется вывести соотношение, связывающее входной x(p) и выходной y(p) сигналы системы. Для этого следует провести ряд замен с целью исключить из соотношения промежуточные сигналы.
Одна из возможных цепочек замен может выглядеть так:
значение d(p) из формулы (23) подставляется в равенство (24):
y( p) W2 ( p) W3 ( p) c( p) ; |
(27) |
c(p) из (21) → в (27): |
|
y( p) (b( p) f ( p)) W2 ( p) W3 ( p) ; |
(28) |
b(p) и f(p) из (22) и (26) → в (28): |
|
y( p) (W1 ( p) a( p) W5 ( p) y( p)) W2 ( p) W3 ( p) ; |
(29) |
a(p) из (20) → в (29): |
|
y( p) (W1 ( p) (x( p) e( p)) W5 ( p) y( p)) W2 ( p) W3 ( p) ; |
(30) |
e(p) из (25) → в (30): |
|
y( p) (W1 ( p) (x( p) W4 ( p) d( p)) W5 ( p) y( p)) W2 ( p) W3 ( p) ; |
(31) |
значение d ( p) y( p) /W3 ( p) из соотношения (24) подставляется в выражение (31):
y( p) ((x( p) |
y( p) |
W ( p)) W ( p) W ( p) y( p)) W ( p) W ( p) |
||||
|
||||||
|
W3 ( p) |
4 |
1 |
5 |
2 |
3 |
|
|
|
|
|
|
|
x( p) W1 ( p) W2 ( p) W3 ( p) y( p) W1 ( p) W2 ( p) W4 ( p) |
||||||
|
y( p) W2 ( p) W3 ( p) W5 ( p) . |
|
(32) |
|||
Равенство (32) не содержит промежуточных сигналов и позволяет выразить искомое отношение y(p)/x(p), представляющее собой передаточную функцию системы:
9
y( p) (1 W1 ( p) W2 ( p) W4 ( p) W2 ( p) W3 ( p) W5 ( p)) x( p) W1 ( p) W2 ( p) W3 ( p) ;
y( p) |
|
|
|
W1 ( p) W2 ( p) W3 ( p) |
|
|
. |
(33) |
|
x( p) |
1 W ( p) W |
( p) W ( p) W ( p) W ( p) W ( p) |
|||||||
|
1 |
2 |
4 |
2 |
3 |
5 |
|
|
|
Выражение (33) позволяет сформулировать правило записи передаточной функции для системы из двух связных контуров с положительными ОС.
Правило. Передаточная функция представляет собой дробь, в числителе которой произведение передаточных функций прямой цепи от входа к выходу, в знаменателе – единица минус произведение передаточных функций звеньев первого контура и минус произведение передаточных функций звеньев второго контура.
Чтобы выяснить, как изменится это Правило в случае отрицательного знака обратной связи в свя́зных контурах, повторим вывод формулы (33) для передаточной функции системы, изменив знак ОС в одном из контуров на отрицательный (рис. 5).
|
e(p) |
|
|
|
d(p) |
|
|
|
|
|
|
|
|
x(p) |
|
W4(p) |
|
|
|
|
|
|
y(p) |
||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
a(p) |
|
|
b(p) |
|
c(p) |
|
|
d(p) |
|
|
|||
W1(p) |
|
|
W2(p) |
|
W3(p) |
|
|||||||
|
|
|
|
|
f(p) |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(p) |
|
||
|
|
|
|
|
|
W5(p) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||||
|
|
Рис. 5. Система со связными контурами ПОС и ООС |
|||||||||||
Отрицательная ОС изменяет соотношение для первого сумматора. Вместо (20) |
|||||||||||||
имеет место разность: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
a( p) x( p) e( p) . |
(34) |
||||||
Соотношения (21)–(26) остаются без изменений. Последовательность производимых замен остается прежней:
d(p) из (23) → в (24):
|
y( p) W2 ( p) W3 ( p) c( p) ; |
(35) |
|
c(p) из (21) → в (36): |
|
|
y( p) (b( p) f ( p)) W2 ( p) W3 ( p) ; |
(36) |
|
b(p) и f(p) из (22) и (26) → в (36): |
|
|
10 |
|