

методички / 4046 ЭИ
.pdf4046 |
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ |
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА |
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Механика и инженерная графика»
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Лабораторный практикум для обучающихся по специальности 23.05.01
«Наземные транспортно-технологические средства» очной и заочной форм обучения
Составители: Ю.Д. Карышев Ю.К. Мустафаев Л. В. Кудюров В. П. Червинский
Самара
2016
1
УДК 531/534
Теоретическая механика : лабораторный практикум для обучающихся по специальности 23.05.01 «Наземные транспортно-технологические средства» очной и заочной форм обучения / составители : Ю. Д. Карышев, Ю. К. Мустафаев, Л.В. Кудюров, В.П. Червинский. – Самара : СамГУПС, 2016. – 55 с.
Лабораторный практикум составлен в соответствии с рабочей программой дисциплины «Теоретическая механика» для обучающихся по специальности 23.05.01 «Наземные транспортно-технологические средства» очной и заочной формы обучения.
В лабораторном практикуме содержатся основные теоретические сведения из разделов дисциплины «Теоретическая механика», соответствующих теме выполняемой лабораторной работы. Приводится краткое описание лабораторной установки и порядок выполнения лабораторной работы. В конце каждой работы приведен образец выполнения отчета по лабораторной работе. Для закрепления пройденного материала, обучающимся предлагается ответить на контрольные вопросы по теме выполненной работы.
Утвержден на заседании кафедры 16.05.2016 г., протокол № 10. Печатается по решению редакционно-издательского совета СамГУПС.
Составители: Карышев Юрий Дмитриевич Мустафаев Юрий Кямалович Кудюров Лев Владимирович Червинский Вилен Петрович
Рецензенты: к.т.н., доцент, зав. кафедрой «СДМ» СамГУПС В. А. Кожевников; профессор, д.т.н., профессор кафедры «Механика и инженерная графика» СамГУПС В. В. Янковский.
Под редакцией составителей
Подписано в печать 17.06.2016. Формат 60х90 1/16. Усл. печ. л. 3,44. Заказ 114.
© Самарский государственный университет путей сообщения, 2016
2
ВВЕДЕНИЕ
Дисциплина «Теоретическая механика» – одна из дисциплин, преподаваемых на кафедре «Механика и инженерная графика» СамГУПС, являющаяся неотъемлемым звеном в цикле дисциплин, отвечающих за полноценную подготовку будущего инженера. Выполнение лабораторных работ в ходе изучения дисциплины «Теоретическая механика» предусмотрено учебным планом подготовки инженеров специальности 23.05.01 «Наземные транспортно-технологические средства».
За дисциплиной закреплены следующие компетенции:
ОК-1 – способность представить современную картину мира на основе целостной системы естественнонаучных и математических знаний, ориентироваться в ценностях бытия, жизни, культуры;
ОК-8 – способность самостоятельно применять методы и средства познания, обучения и самоконтроля для приобретения новых знаний и умений, в том числе в новых областях, непосредственно не связанных со сферой деятельности, развития социальных и профессиональных компетенций;
ПК-3 – способность к работе в многонациональном коллективе, в том числе и над междисциплинарными, инновационными проектами, способность в качестве руководителя подразделения, лидера группы сотрудников формировать цели команды, принимать решения в ситуациях риска, учитывая цену ошибки, вести обучение и оказывать помощь сотрудникам.
Для успешного освоения дисциплины «Теоретическая механика» от студента требуются знания таких дисциплин, как «Высшая математика», «Физика». Знания, полученные при изучении данной дисциплины, необходимы для дальнейшего успешного обучения таким дисциплинам, как «Динамика подвижного состава», «Конструкция и расчет механического оборудования электрического транспорта», «Проектирование тягового привода электрического транспорта».
В результате успешного освоения дисциплины студент должен знать законы и методы теоретической механики, уметь применить их в осуществлении проектирования новых машин, конструкций и сооружений, владеть навыками решения задач статики, кинематики, динамики материальной точки и механической системы, построения математических моделей исследуемых явлений на основе законов теоретической механики.
ОБЩИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ ЛАБОРАТОРНЫХ РАБОТ
Варианты исходных данных, количество и состав подгрупп определяется преподавателем. При выполнении лабораторных работ необходимо неукоснительное выполнение требований техники безопасности, правил эксплуатации электроустановок, правил пожарной безопасности. На первом занятии проводится вводный инструктаж, о чем делается запись в журнале инструктажа. Студент, не прослушавший инструктаж, обязан сообщить об этом преподавателю или лаборанту и не должен приступать к
3
выполнению лабораторных работ, не расписавшись о проведенном с ним инструктаже в соответствующем журнале.
Оформление отчетов по проведенным лабораторным работам должно сопровождаться всеми необходимыми пояснениями и обосновываться ссылками на соответствующие теоремы или иные теоретические положения, на основе которых производится решение. В качестве основы для выполнения отчета может использоваться отчет, приводимый в данных методических указаниях в каждой работе. Необходимо описывать свои действия в форме множественного числа прошедшего времени в соответствии с правилами русского языка (напр. «измерили, выполнили, рассчитали…» вместо приведенных в методических указаниях «измерить, выполнить, рассчитать…» и т.п.). Вывод по лабораторной работе формулируется студентом самостоятельно и приводится в конце отчета.
Лабораторная работа № 1
ИССЛЕДОВАНИЕ ПЛОСКОЙ СИСТЕМЫ СХОДЯЩИХСЯ СИЛ
Цель работы: изучение свойств плоской системы сходящихся сил; закрепление навыков определения равнодействующей и уравновешивающей силы для плоской системы сходящихся сил графическим и аналитическим методами.
Теоретические сведения
Графический метод нахождения равнодействующей сходящейся плоской системы
сил.
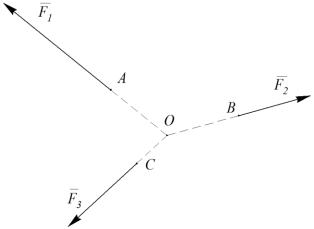
Система сходящихся сил – это система, образованная силами, линии действия которых пересекаются в одной точке (рис. 1).
Рис. 1
4

Система сходящихся сил эквивалентна одной силе, которая равна векторной сумме всех сил, входящих в эту систему, и проходит через точку пересечения этих сил. Эта сила называется равнодействующей данной системы сил или главным вектором системы сил. Воспользовавшись аксиомой о переносе силы вдоль линии ее действия, систему сил, изображенную на рис 1, можно заменить эквивалентной системой сил в виде пучка векторов F1, F2, и F3 , исходящих из точки O, являющейся точкой пересечения линий действия этих сил (рис. 2).
Векторную сумму можно найти геометрически, используя способ построения силового многоугольника (рис. 3) или последовательного сложения пар векторов по правилу параллелограмма (рис. 4). Данный метод называется графическим.
Рис. 2 |
Рис. 3 |
Рис. 4
Для реализации графического метода нахождения равнодействующей, необходимо задать масштабный коэффициент kF для изображения векторов сил. Длина вектора силы Fi на плане сил определится по формуле:
lF = Fi / kF,
где lF – длина вектора на плане, F – величина вектора.
5

Точность определения равнодействующей при помощи графического метода сильно зависит от точности и аккуратности построений.
Уравновешивающая сходящейся системы сил представляет собой вектор, равный по модулю и противоположный по направлению вектору равнодействующей. На рисунках 3 и 4 он обозначен как Fур.
Аналитический метод нахождения равнодействующей системы сходящихся сил. Для определения равнодействующей плоской системы сходящихся сил
аналитическим методом можно использовать метод суммирования проекций сил на координатные оси. Для этого сначала находим проекции каждой силы на оси координат
Fix Fi cos i ,
Fiy Fi sin i
где αi – угол между положительным направлением горизонтальной оси x и направлением вектора силы Fi. Затем находим алгебраическую сумму проекций на соответствующую ось с учетом знака проекции.
F1x F2 x F3x RxF1y F2 y F3 y Ry .
В результате получим проекции равнодействующей R на оси координат. Модуль равнодействующей находим по теореме Пифагора:
R 
 Rx2 Ry2 .
Rx2 Ry2 .
Направление равнодействующей R определится направляющим косинусом:
R cos(i ; R) Rx ,
откуда определяется искомый угол:
R arccos RRx .
При аналитическом определении угла по направляющему косинусу, следует проанализировать, в какой четверти системы координат находится вектор, что можно сделать, оценив знаки проекций вектора на оси. Это обстоятельство связано с тем, что при расчете на микрокалькуляторе в качестве результата возвращается первый из пары углов, удовлетворяющих заданному значению косинуса угла. Например, значение функции arccos(0,5) – это углы 60° и 300°, но калькулятор возвращает только результат
6

|
|
|
|
|
|
|
|
|
|
3 |
|
||||
60°, |
arccos |
|
|
|
– это пара углов 150° и 210° при возвращаемом калькулятором |
||
|
|
|
|||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
||
значении 150° и т.д.
Геометрическое условие равновесия: система сходящихся сил уравновешена, когда силовой многоугольник замкнут. Чтобы уравновесить систему сходящихся сил, изображенную на рис. 1.2, надо добавить к ней силу Fур, равную по величине равнодействующей, но противоположную ей по направлению (рис. 3, рис 4). Сила, которая уравновешивает данную систему сходящихся сил, называется
уравновешивающей.
Аналитическое условие равновесия: плоская система сходящихся сил уравновешена, когда суммы проекций всех сил на каждую из двух координатных осей равны нулю. Исходя из этого условия, можно сразу найти величину и направление уравновешивающей силы, не находя равнодействующую.
Описание лабораторной установки.
Приборы и принадлежности, используемые в данной работе: лабораторная установка ТМт-01 (рис. 5), тарированные грузы по 0,1; 0,2; 0,5 кг, набор подвесов.
Рис. 5. Внешний вид лабораторной установки ТМт-01
Работа проводится на лабораторной установке ТМт-01, схема которой изображена на рис. 6. Установка состоит из рамы 1, закрепленной на двух основаниях. На раме закреплено десять подвижных блоков 2, фиксируемых в выбранном положении при помощи винтов. Через блоки перекинуты капроновые тросики 3 с подвесом для грузов 4. Второй конец тросиков 4 надевается при помощи металлической петли на центральный штифт 5 подвижного диска 6. Усилие, приложенное к штифту 5, вызывает смещение подвижного диска 6 относительно неподвижного диска-транспортира 7 благодаря деформации блока радиально закрепленных пружин (расположены за дисками 6 и 7).
7
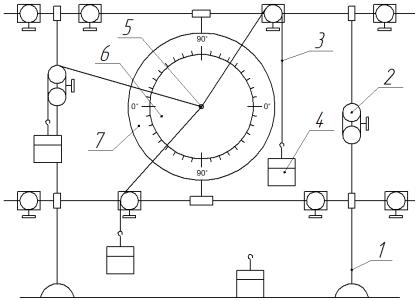
Смещение диска 6 контролируется по отклонению горизонтальных и вертикальных рисок. В покое и в случае приложения к штифту 5 уравновешенной системы сходящихся сил риски на подвижном и неподвижном дисках должны совпадать. В случае несовпадения рисок производится регулировка натяжения отдельных пружин блока за счет вращения регулировочных гаек.
Рис. 6. Схема лабораторной установки ТМт-01
Порядок выполнения работы
Расчетная часть
Исходные данные
Выбрать исходные данные согласно выданному преподавателем варианту из табл. 1.
Таблица 1
Номер варианта |
F1, Н |
α1, град. |
F2, Н |
α2, град |
F3, Н |
α3, град |
|
|
|
|
|
|
|
1 |
2 |
40 |
4 |
240 |
2 |
105 |
|
|
|
|
|
|
|
2 |
3 |
45 |
2 |
200 |
2 |
140 |
|
|
|
|
|
|
|
3 |
5 |
15 |
3 |
80 |
4 |
230 |
|
|
|
|
|
|
|
4 |
4 |
25 |
2 |
110 |
4 |
160 |
|
|
|
|
|
|
|
5 |
1 |
15 |
2 |
85 |
3 |
335 |
|
|
|
|
|
|
|
Определение уравновешивающей силы графическим способом
1.Выбрать масштаб построений kF.
2.В выбранном масштабе построить заданную систему сил на координатной плоскости.
3.По правилу параллелограмма найти равнодействующую R заданной системы сил.
8
4.Отложить противоположно равнодействующей уравновешивающую силу F*ур.
5.Измерить угол между направлением уравновешивающей и положительным направлением оси х. Записать в табл. 2.
|
|
|
|
Таблица 2 |
|
|
|
|
|
|
|
Величина |
Угол вектора |
Величина |
Угол вектора |
Погрешность |
|
уравновешивающей |
уравновешивающей |
уравновешивающей |
определения |
||
уравновешивающей, |
|||||
силы, полученная |
силы, вычисленная |
силы, вычисленный |
силы |
||
полученный |
|||||
графическим |
аналитическим |
аналитическим |
графическим |
||
графически |
|||||
способом |
способом |
способом |
способом |
||
|
|||||
|
|
|
|
|
|
F*ур, Н |
α*, град. |
Fур |
α |
δF |
|
|
|
|
|
|
6. Измерив длину уравновешивающей (или равнодействующей), определить ее значение, используя масштаб диаграммы сил.
F*ур=lF·kF.
7. Величину записать в таблицу 2.
Определение уравновешивающей силы аналитическим способом
1. Для определения уравновешивающей силы воспользуемся условием равновесия сходящейся системы сил:
|
|
|
|
|
|
|
|
|
|
|
F |
0 . |
|
|
|
|
|
||
Для условий данной задачи получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F1 |
F2 |
F3 |
Fур |
0 . |
|
||||
Для плоской системы сил, спроецировав данное уравнение на оси координат, |
|||||||||
получим систему скалярных уравнений: |
|
|
|
|
|
|
|
|
|
F |
F |
F |
|
F |
|
|
0 |
|
|
1x |
2 x |
3x |
|
ур x |
|
. |
|||
|
F2 y F3 y |
Fур |
|
0 |
|||||
F1y |
y |
|
|||||||
|
|
|
|
|
|
|
|
|
|
Проекции каждой из сил на оси координат можно найти по формулам (учитывая |
|||||||||
знак): |
|
|
|
|
|
|
|
|
|
|
Fix Fi cos i |
, |
|
|
|
||||
|
F |
F sin |
i |
|
|
|
|||
|
iy |
i |
|
|
|
|
|
|
|
тогда неизвестные проекции уравновешивающей силы будут равны с точностью до знака
Fур x F1 cos 1 F2 cos 2 F3 cos 3 .
Fур y F1 sin 1 F2 sin 2 F3 sin 3
9

2. Величину (модуль) уравновешивающей силы нужно найти по вычисленным выше проекциям, используя теорему Пифагора:
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
ур |
|
F |
|
2 |
F |
2 . |
|||||
|
|
|
|
ур x |
|
|
|
ур y |
||||
3. Для нахождения угла между |
осью |
|
х |
и |
|
вектором уравновешивающей силы |
||||||
|
|
|
|
|
|
|
F |
ур x |
|
|
||
используется направляющий косинус: cos(i ; F |
|
|
) |
|
|
|
, зная который, можно вычислить |
|||||
ур |
|
Fур |
|
|||||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
искомый угол: |
|
|
|
|
|
|
|
|
|
|
|
|
arccos Fур x .
Fур
4. Следует отметить, что полученному значению направляющего косинуса соответствует два значения угла, в то время как микрокалькулятор возвращает только первое значение, отсчитываемой от оси x против часовой стрелки. Поэтому, при нахождении истинного значения угла следует руководствоваться знаками проекции и проверить, в какую четверть координатной плоскости направлен вектор.
5. Результаты, полученные аналитическим путем, занести в таблицу 2.
6. Определить погрешность определения уравновешивающей силы графическим способом по формуле
|
|
F |
|
F * |
|
|
|
F |
|
|
ур |
ур |
|
|
100% , |
|
|
|
|||||
|
|
|
|
|
|
||
|
|
|
Fур |
||||
результат записать в таблицу 2.
Экспериментальная часть
1. Ознакомиться с устройством лабораторной установки.
3.Разместить установку на ровной горизонтальной поверхности стола.
4.Произвести настройку устройства визуального контроля до совпадения рисок на подвижном диске с рисками транспортира посредством натяжения пружин регулировочными гайками.
5.Надеть на палец устройства визуального контроля петли с капроновыми тросиками и привязанными подвесами.
6.Установить подвижные блоки в выбранные положения и перебросить через ролики блоков тросики с подвесами.
7.Нагрузить подвесы наборами гирь и задать углы наклона натянутых тросиков к оси X в соответствии с исходными данными.
10