

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Уфимский государственный авиационный технический университет»
|
100 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 11 12 |
|||
Расчетно-графическая работа
по дисциплине: «Управление техническими системами»
Вариант 1
|
Группа ЭМз-504 |
Ф.И.О. |
Подпись |
Дата |
Оценка |
|
Студент |
Батыров Д.В. |
|
|
|
|
Консультант |
Петров П.В. |
|
|
|
|
Принял |
Петров П.В. |
|
|
|
Уфа 2019
Содержание Введение
Всякая система автоматического управления должна нормально функционировать при действии на нее случайных помех, шумов или, несмотря на действие различных посторонних возмущений, она должна работать устойчиво. В связи с этим чрезвычайно важным является понятие об устойчивости заданного режима работы системы.
Для линейных систем автоматического управления заданным режимом принято состояние равновесия. В простейшем случае понятие устойчивости систем связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в исходное состояние.
При рассмотрении вопросов устойчивости интерес вызывает только свободная составляющая, определяемая общим решением однородного дифференциального уравнения без правой части. Физический смысл этой составляющей заключается в том, что это как раз то решение, которое отлично от нуля только в течение переходного процесса и исчезает при установившемся режиме. Вынужденная составляющая выходной величины, зависящая от вида внешнего воздействия и правой части дифференциального уравнения, на устойчивость системы не влияет.
Определение асимптотической устойчивости формулируется следующим образом: cистема является устойчивой, если свободная составляющая переходного процесса с течением времени стремится к нулю.
1 Составление и преобразование структурной схемы и предварительное исследование сар
1.1 Начальные условия
Работа системы автоматического управления задана системой дифференциальных уравнений:
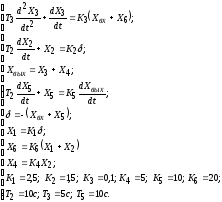
1.2 Составление структурной схемы
Составим структурную схему САУ. Перепишем в операторной форме исходную систему дифференциальных уравнений, приняв начальные условия нулевыми:
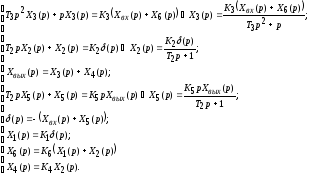
Полученной системе уравнений соответствует структурная схема, представленная на рисунке 1.1.
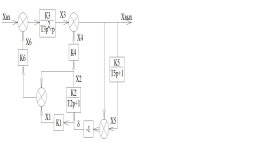
Рисунок 1.1 – Структурная схема САУ
Построим полученную схему в пакете Simulink Matlab с подстановкой численных значений. Результат представлен на рисунке 1.2.

Рисунок 1.2 – Схема САУ с подставленными числовыми значениями
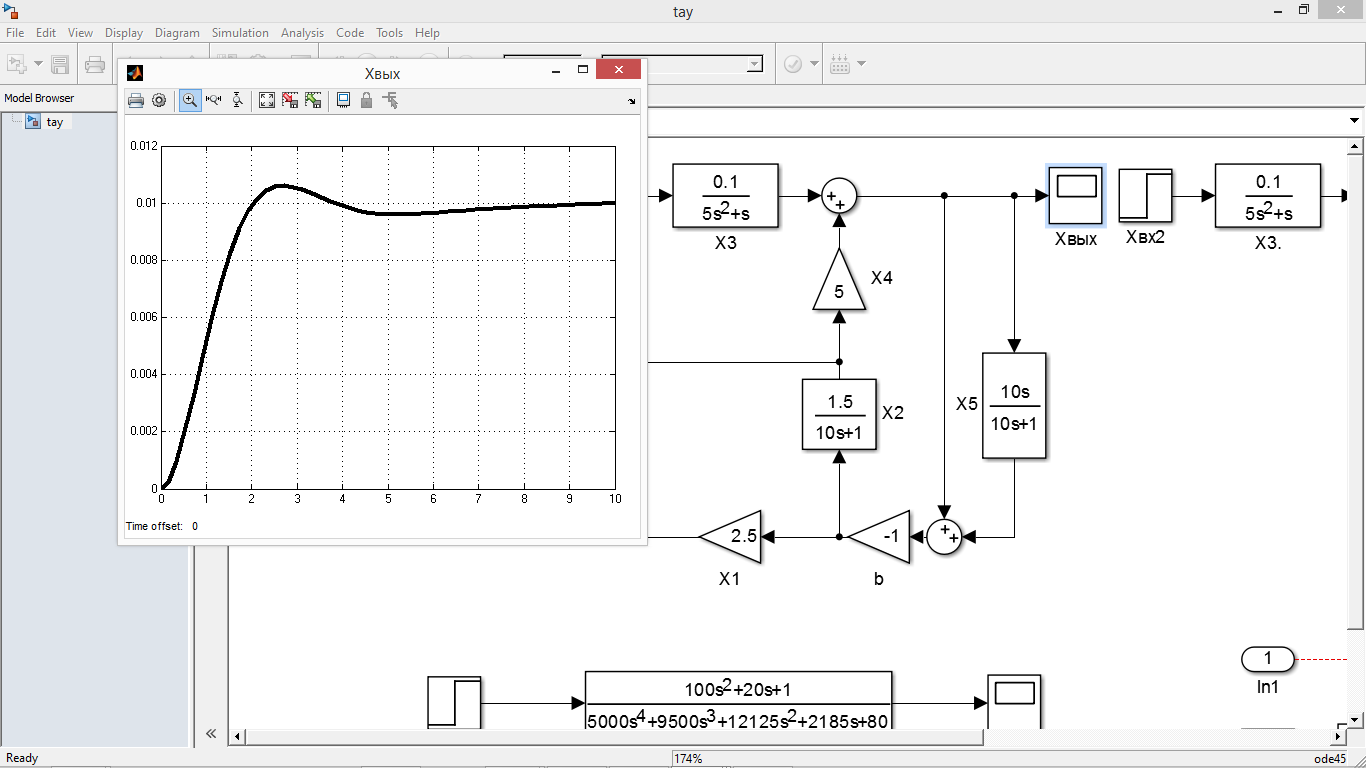
Рисунок 1.3 – Переходная характеристика замкнутой САУ
1.3 Преобразование структурной схемы
Для
нахождения передаточной функции системы
 преобразуем структурную схему САУ,
изображенную на рис. 1.2. Для этого
используем известные правила структурных
преобразований. Последовательность
преобразований показана (рис. 1.4, а –
г).
преобразуем структурную схему САУ,
изображенную на рис. 1.2. Для этого
используем известные правила структурных
преобразований. Последовательность
преобразований показана (рис. 1.4, а –
г).
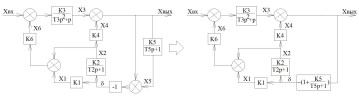
Рисунок 1.4а – Преобразование исходной схемы САУ. 1-й этап: Параллельное соединение звенев, последовательное соединение звеньев
При параллельном соединении динамических звеньев их передаточные функции алгебраически складываются. [3,с.51]
При последовательном соединении динамических звеньев их передаточные функции перемножаются. [3,с.51]
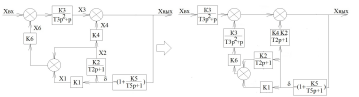
Рисунок 1.4б – Преобразование исходной схемы САУ. 2-й этап: Перенос сумматора с входа звена на выход, перенос узла с выхода звена на вход
Перенос узла с выхода звена на вход требует включение второго такого же звена, через которое осуществлено перемещение, в ответвлениях от узла. [3,с.52]
Перенос сумматора с входа звена на выход требует включение второго такого же звена, через которое осуществлено перемещение, в ответвлениях от сумматора. [3,с.52]
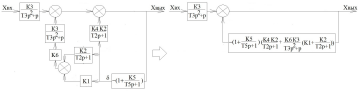
Рисунок 1.4 в – Преобразование исходной схемы САУ. 3-й этап: Параллельное соединение звеньев, последовательное соединение звеньев
При параллельном соединении динамических звеньев их передаточные функции алгебраически складываются. [3,с.51]
При последовательном соединении динамических звеньев их передаточные функции перемножаются. [3,с.51]
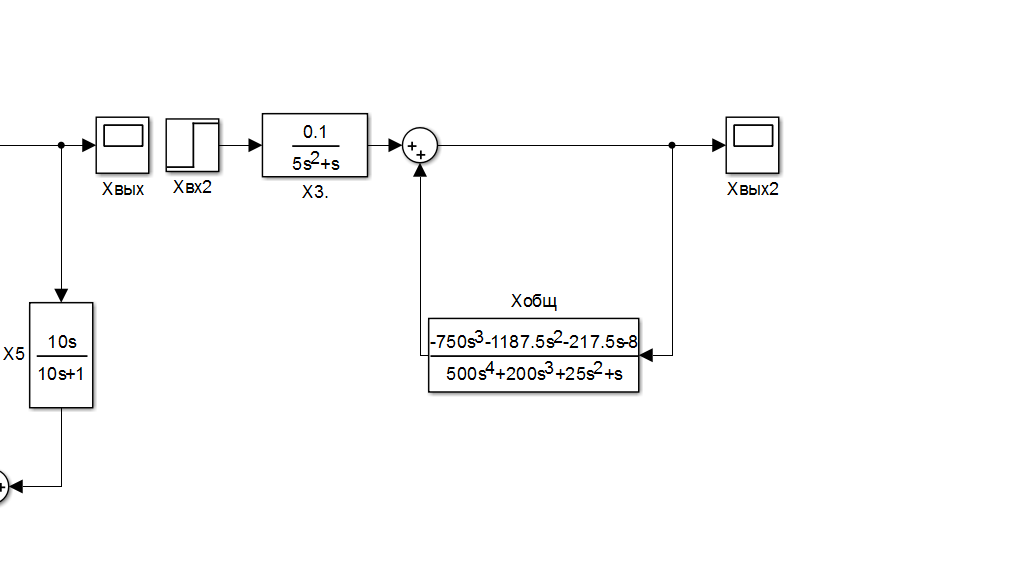
Рисунок 1.4г – Преобразованная схема САУ
Переходную характеристику строим по схеме, представленной на рис. 1.4г.
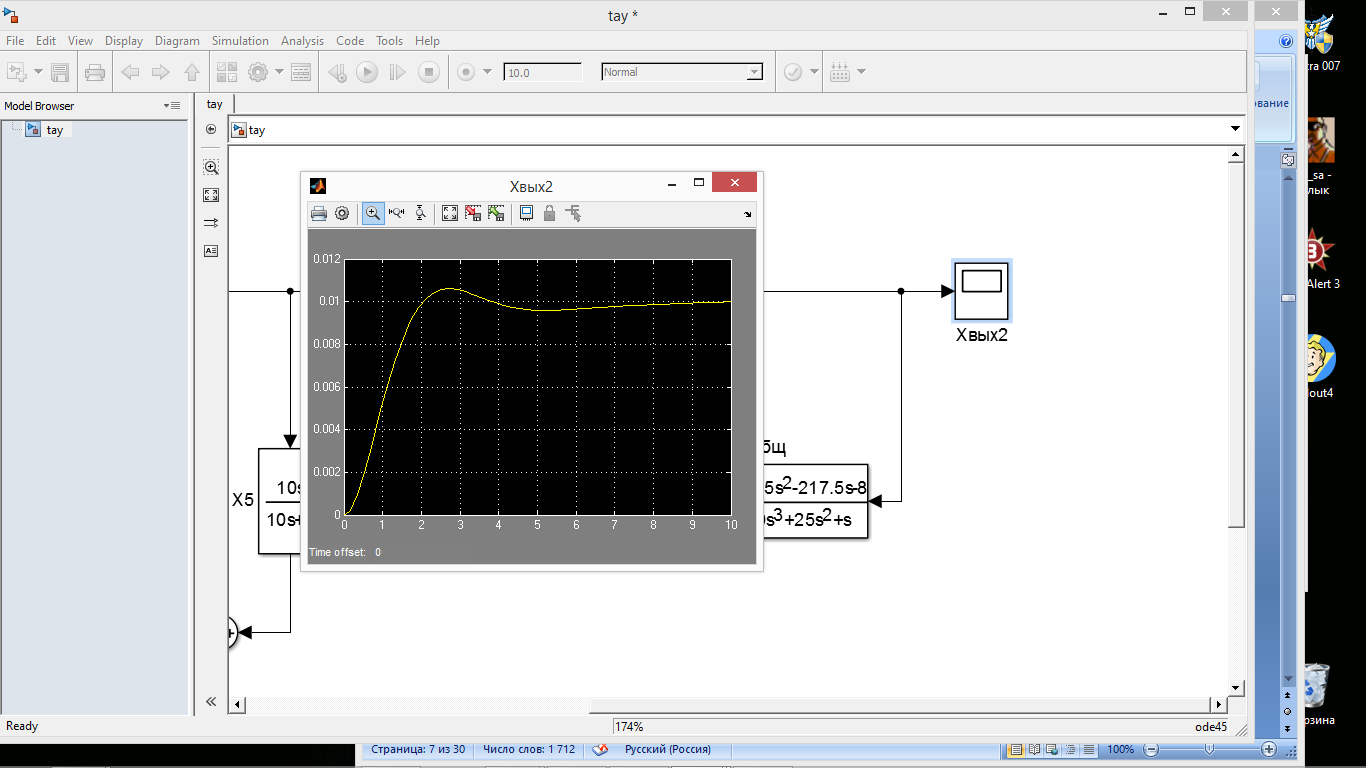
Рисунок 1.5 – Переходная характеристика преобразованной схемы САУ
На рисунках 1.3 и 1.5 видно, что графики переходных процессов h(t) преобразованной и исходной схемы совпадают, отсюда следует вывод, что схема преобразована верно. Для достоверности, выполним проверку в математическом пакете MathCAD. Скрипт программы представлен на рисунке 1.6.

Рисунок 1.6 – Скрипт MathCAD переходной функции замкнутой САУ
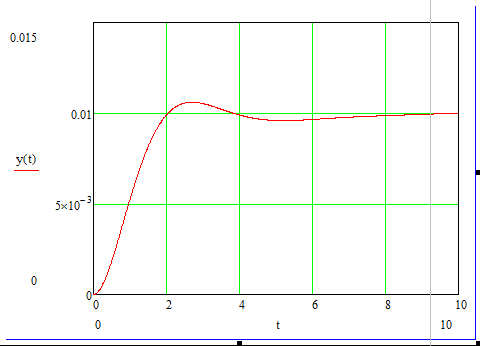
Рисунок 1.7 – График переходной характеристики замкнутой САУ в пакете MathCAD