

Гидроманипуляторы и лесное технологическое оборудование Бартенев
.pdfГИДРОМАНИПУЛЯТОРЫ И ЛЕСНОЕ ТЕХНОЛОГИЧЕСКОЕ
ОБОРУДОВАНИЕ
Монография
Под редакцией доктора технических наук,
профессора И.М. Бартенева
Москва Издательство «ФЛИНТА» Издательство «Наука»
2011
УДК 630*:65.011.54 |
Печатается по решению научно- |
ББК 43.43 |
технического совета ГОУ ВПО «ВГЛТА» |
Г46 |
(протокол № 3 от 06.06.2011 ) |
Р е ц е н з е н т ы:
д.т.н. проф. ГОУ ВПО «ВГАУ» А.П. Тарасенко;
д.с.-х.н. проф. В.В. Цыплаков
А в т о р ы:
З.К. Емтыль, И.М. Бартенев, М.В. Драпалюк, П.И. Попиков, А.П. Татаренко, Л.Д. Бухтояров
Гидроманипуляторы и лесное технологическое оборудование : монография / Г46 З.К. Емтыль, И.М. Бартенев, М.В. Драпалюк, П.И. Попиков, А.П. Татаренко, Л.Д. Бухтояров; под ред. д-ра технических наук, проф. И.М. Бартенева. – М. : ФЛИНТА :
Наука, 2011. – 408 с. : илл.
ISBN 978-5-9765-1189-7 (ФЛИНТА) ISBN 978-5-02-037696-0 (Наука)
В монографии изложены результаты исследований по выбору параметров механизмов конструкций манипуляторов с учётом инерционных сил, податливости рабочей жидкости и элементов гидропривода; динамической нагруженности манипулятора при совмещении движений отдельных звеньев и эффективности совмещения; рассмотрена динамика гидропривода с дополнительным демпфером и представлены механико-технологические основы совершенствования конструкций гидроманипулятора, а также эксериментальные данные по динамике составляющих его механизмов и звеньев; представлено технологическое оборудование к гидроманипуляторам для выполнения отдельных рабочих операций в лесном хозяйстве.
Монография предназначена для научных работников и конструкторов лесного машиностроения, аспирантов и студентов лесотехнических вузов.
УДК 630*:65.011.54 ББК 43.43
Научное издание
Бартенев Иван Михайлович, Емтыль Зауркан Камболетович, Татаренко Александр Петрович, Драпалюк Михаил Валентинович, Попиков Петр Иванович, Бухтояров Леонид Дмитриевич
ГИДРОМАНИПУЛЯТОРЫ И ЛЕСНОЕ ТЕХНОЛОГИЧЕСКОЕ ОБОРУДОВАНИЕ
Монография
Компьютерная верстка Л.Д. Бухтоярова
Подписано в печать 17.06.11. Формат 60х84 1/16. Усл. печ. л. 24,99. Уч.-изд. л. 20,82. Тираж 500 экз. Заказ №
ООО «ФЛИНТА», 117342, г. Москва, ул. Бутлерова, д. 17-Б, комн. 324.
Тел/факс: (495) 334-82-65; тел. (495) 336-03-11 E-mail: flinta@mail.ru; WebSite: www.flinta.ru
Издательство «Наука», 117997, ГСП-7, г. Москва В-485, ул. Профсоюзная, д. 90
Отпечатано с готового оригинал-макета в типографии ГОУ ВПО «ВГЛТА» 394087, г. Воронеж, ул. Докучаева, д. 10
ISBN 978-5-9765-1189-7 |
(ФЛИНТА) |
© Колл. авторов, 2011 |
ISBN 978-5-02-037696-0 |
(Наука) |
|
3
Предисловие
Сложившиеся за многие годы технологии лесовосстановления и лесоразведения, выработанные технологические процессы и операции характеризуются не только положительными, но и отрицательными факторами, к числу которых относятся большая энерго- и материалоемкость, нарушение экологии природной среды.
Существующий технологический процесс лесовосстановления на вырубках включает такие операции как сбор и удаление порубочных остатков, корчевка пней, подготовка почвы, посадка культур, лесоводственный и агротехнический уходы за ними. Все эти операции, за исключением корчевки пней, выполняются при непрерывном поступательном движении агрегатов за счёт мощности двигателя, реализуемой через движители тракторов. В результате образуется колея, глубина которой зависит от удельного давления движителя на почву, сдирается напочвенный покров, нарушается сложившаяся веками структура почв, повреждается подрост ценных пород.
Многооперационность технологических процессов приводит к многократным перемещениям различных агрегатов по одному следу и большой степени покрытия лесокультурой площади колеёй, что увеличивает плотность почвы и снижает её водопроницаемость. В результате в зоне расположения корней, плотность почвы превышает допустимые пределы оптимального значения и возрастает водная эрозия почв на площадях с уклоном всего лишь в 2 – 30 и более.
Корчевка пней вместе с корнями сопровождается минерализацией окружающей поверхности с разрушением структуры почв, образованием подпневых ям, удалением гумусового горизонта и снижением плодородия. Остающиеся нераскорчеванные кулисы между расчищенными полосами, заполненные дополнительно выкорчеванными пнями, зарастают порослью второстепенных по-
4
род и становятся непреодолимым препятствием на пути движения тракторных агрегатов, осуществляющих уходы за культурами.
Всё это выдвигает перед учеными, конструкторами, машиностроителями и работниками лесного комплекса важные задачи по разработке и применению энергоресурсо- и экологосберегающих технологий и средств механизации работ в лесном хозяйстве. Одним из путей решения стоящих задач является научно обоснованный переход от непрерывного способа выполнения технологических операций к дискретному способу, к более широкому внедрению рабочих органов активного действия, пневмно- и гидравлического привода, обладающего демпфирующими свойствами за счёт упругих элементов. В качестве средства, транспортирующего рабочие органы при выполнении ими рабочих операции, например, по дроблению или срезанию пней, подготовке почвы площадками, посадке растений в них и уходу за ними и др., можно использовать гидравлические манипуляторы разного класса и типа.
В монографии дан подробный анализ гидравлических манипуляторов, теоретические основы выбора параметров их конструктивных элементов, рассмотрены вопросы податливости рабочей жидкости и её влияния на динамическую нагруженность манипулятора и ряд других вопросов. Представлено технологическое оборудование, навешиваемое на манипуляторы, для выполнения различных видов работ.
Книга предназначена для научных работников и конструкторов лесного машиностроения, аспирантов и студентов лесотехнических вузов.
Главы 1,2,3,4,5 и 7 написаны З.К. Емтылем и А.П. Татаренко под научным руководством и непосредственном участии И.М. Бартенева в процессе подготовки З.К. Емтылем и А.П. Татаренко кандидатских и З.К. Емтылем докторской диссертаций; главы6,8 – М.В. Драпалюком, П.И. ПопиковымиЛ.Д. Бухтояровым.
5
1.Область применения манипуляторов
инаправления, связанные
с повышением их технического уровня
1.1. Типы манипуляторов и область их применения
История зарождения и развития лесозаготовительных машин манипуляторного типа достаточно молода [118]. Начало было положено созданием и успешной эксплуатацией на протяжении почти 10 лет валочно-пакетирующей машины для рубок ухода ЛП-2, которую в 60–70-ых годах производил Великолукский машиностроительный завод «Торфмаш». Подобные машины обеспечивают не только достаточную производительность, но и сохранность подроста ценных пород [153].
Базируясь на опыте создания и эксплуатации машины ЛП-2, отечественными учеными, конструкторами и производителями в 70–80-ых годах была создана целая гамма лесосечных машин манипуляторного типа: бесчокерные трелевочные машины ТБ-1 (Онежский тракторный завод) и ЛП-18 (Пермское ПО «Коммунар»); валочно-пакетирующая машина ЛП-19 (Йошкар-Олинский машиностроительный завод «Лесмаш»), валочно-трелевочная машина ЛП-49 (Пермское ПО «Коммунар»), которые позволили довести уровень машинизации наиболее тяжелых лесозаготовительных работ до 60–65% [152].
В1980 году были начаты интенсивные работы по созданию отечественных манипуляторов для лесозаготовительных машин.
Врезультате анализа сложившихся и перспективных технологий лесозаготовительных работ были определены типы и основные параметры манипулято-
ров [110, 147].

6
В зависимости от конструкции манипуляторы лесозаготовительных машин подразделяются на следующие типы (рис.1.1):
Рис. 1.1. Типы манипуляторов лесозаготовительных машин: МШ - шарнирно-рычажный (а); МТ - телескопический (б); МК - комбинированный (в).
Манипулятор шарнирно-рычажный состоит из стрелы и рукояти, соединенных шарнирно. Манипулятор телескопического типа представлен как ряд телескопически подвижных звеньев, а рукоять в нём, как элемент конструкции
– отсутствует. Манипулятор комбинированный – это шарнирно-рычажный, в котором рукоять снабжена выдвижной секцией (удлинителем).
Конструкция манипуляторов должна обеспечивать:
-удобный доступ к сборочным единицам, подвергаемым ежедневному техническому обслуживанию;
7
-возможность разборки на составные части для транспортирования;
-удобство выполнения монтажных и демонтажных работ;
-возможность агрегатного ремонта;
-управление и ежесменное обслуживание одним оператором;
-использование с различными сменными рабочими органами, входящими в комплект манипулятора.
Манипуляторы шарнирно-рычажные применяются преимущественно для тяжелых условий работы с грузовым моментом М>110 кНм; телескопические – для лесозаготовительных и лесохозяйственных машин, работающих под пологом леса; комбинированные – для погрузочно-разгрузочных и других основных лесозаготовительных работ в составе различных машин.
Отечественные гидроманипуляторы подразделяются на 7 размерных групп по грузовому моменту (табл.1.1). Минимальный вылет манипулятора, угол поворота в горизонтальной плоскости, момент поворота, мощность основной насосной установки, конструктивная масса зависят от типа и назначения манипулятора.
Наибольшее распространение в лесозаготовительном и лесохозяйственном производстве получили погрузочно-разгрузочные манипуляторы, к которым наряду с технологическими требованиями – максимальный и минимальный вылет рабочего органа, грузовой момент, момент поворота в горизонтальной плоскости, максимальная высота подъема груза – предъявляются требования ограничения манипулятора по массе. Это объясняется тем, что масса манипулятора влияет на выбор базы погрузочно-транспортной машины (форвардера или сортиментовоза), от которой, в значительной мере, зависит соответствие лесозаготовительной или лесохозяйственной машины лесоводственным требованиям, в т.ч. заданному значению удельного давления на грунт и сохранению подроста.
|
|
|
|
|
8 |
|
|
|
|
|
Таблица 1.1 |
Размерные группы манипуляторов по грузовому моменту и вылету стрелы |
|||||
|
|
|
|
|
|
Размерные группы |
|
Сила тяги |
Грузоподъ- |
||
Грузовой мо- |
|
вылет |
Наименование машин |
базового |
емность |
мент, кНм |
|
стрелы, |
|
трактора, |
автомоби- |
|
м |
|
кН |
лей, т. |
|
|
|
|
|||
1. М≥50 |
l ≥ 6 |
Трелевочные тракторы. |
14 30 |
|
|
|
|
|
Валочно-трелевочные машины. |
30 50 |
|
|
|
|
Передвижные рубительные машины. |
14 20 |
|
|
|
|
Ремонтно-заправочные агрегаты. |
|
|
|
|
|
Погрузочно-транспортные средства. |
30 50 |
|
2. М≥70 |
l |
≥ 7 |
Валочно-трелевочные, сучкорезные и |
30 50 |
5 7, 6 |
|
|
|
многооперационные машины. |
|
|
|
|
|
Сортиментовозы. |
|
|
|
|
|
Погрузочно-транспортные средства, |
|
|
|
|
|
лесосплавные агрегаты; сортировочные |
|
|
|
|
|
устройства. |
|
|
3. М≥90 |
l |
≥ 7,5 |
Лесовозные автопоезда. Сучкорезные и |
40 100 |
до 10 |
|
|
|
многооперационные машины. Лесовоз- |
|
|
|
|
|
ные агрегаты. |
|
|
4. М≥110 |
l |
≥ 7,5 |
Трелевочные тракторы, валочно- |
40 100 |
5 10 |
|
|
|
трелевочные, сучкорезные, укладочно- |
|
|
|
|
|
транспортные машины. Лесовозные |
|
|
|
|
|
автопоезда. |
|
|
5. M≥140 |
l ≥ 7,5 |
Валочно-пакетирующие (1 типа) и ва- |
40 100 |
|
|
|
|
|
лочно-трелевочные машины. |
|
|
|
|
|
Сучкорезно-раскряжевочные руби- |
|
|
|
|
|
тельных установок, |
|
|
|
|
|
погрузчики-штабелеры. |
|
|
6. M≥180 |
l |
≥ 8.0 |
Погрузчики-штабелеры. |
|
|
|
|
|
|
|
|
7. M≥320 |
l |
≥ 8.0 |
Валочно-пакетирующие машины(11 |
|
|
|
|
|
типа), сортировочные установки по- |
|
|
|
|
|
грузчики-штабелеры. |
|
|
В настоящее время гидравлические манипуляторы находят все более широкое применение и в других отраслях народного хозяйства: на предприятиях путей сообщений как погрузочно-разгрузочное средство на ремонтных машинах и машинах для обслуживания железнодорожной призмы; на предприятиях нефтегазового и энергетического комплекса в ремонтных и специальных машинах (например – штанговозах), на специальных машинах для перевозки и монтажа железобетонных опор линий электропередач. В перспективе гидроманипуляторы могут найти широкое применение в сельском хозяйстве, автомобильном транспорте.
9
На погрузочно-разгрузочные манипуляторы (за исключением специальных) с 1998 года распространяются правила устройства и безопасной эксплуатации грузоподъемных кранов [137, 138], что делает требования безопасности и надежности приоритетными. Требования, предъявляемые к техническому уровню гидроманипуляторов, повышаются. Это прежде всего экологические требования (меньшая удельная материалоемкость; больший вылет; наличие устройств, исключающих розлив рабочей жидкости при разрыве гибких трубопроводов) и требования безопасности (применение соответствующих материалов и технологий, специальных методов контроля, приборов и устройств безопасности).
Поэтому на протяжении всего периода разработки и производства отечественных погрузочно-разгрузочных манипуляторов ученые, конструкторы и производители ищут резервы, направленные на снижение массы манипуляторов, используя накопленный опыт и научно-технический прогресс.
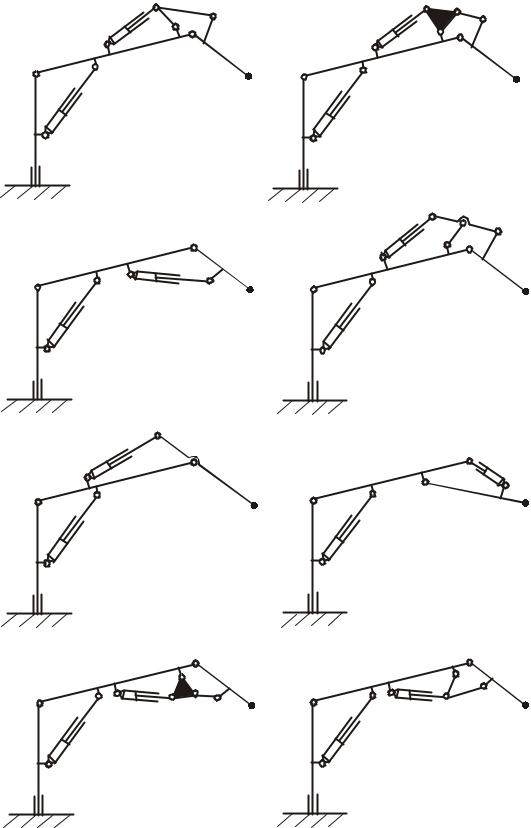
1.2. Компоновочно-кинематические схемы гидравлических манипуляторов и их соответствие предъявляемым требованиям
1.2.1. Механизмы подъема стрелы и привода рукояти
Технический уровень манипулятора во многом зависит от совершенства его кинематической схемы, обеспечивающей работу манипулятора в заданной зоне. Зона работы определяется технологическими и экологическими требованиями. Одним из важнейших показателей технического уровня манипулятора является его масса. Выбор той или иной кинематической схемы, а затем оптимизация ее параметров позволяют существенно снизить массу манипулятора.
Основываясь на данных, опубликованных в работах [102, 15, 18, 14, 17, 24, 25, 35 и др.] и рекламных проспектах, все известные в настоящее время манипуляторы зарубежного и отечественного производства можно объединить в 15 основных групп (рис.1.2; 1.3), отличающихся по кинематике исполнения механизмов подъема стрелы и привода рукояти. Два типа из них №12 и 14 имеют специфическую структурумеханизмаскладываниярукоятиивдальнейшемнерассматриваются.
10
Схема 1 |
Схема 2 |
Схема 3 |
Схема 4 |
Схема 5 |
Схема 6 |
Схема 7 |
Схема 8 |
Рис. 1.2. Кинематические схемы механизма подъема стрелы и привода рукояти гидравлических манипуляторов