

ТАУ - контрольная - 21 вариант 2011
.docУчреждение образования
«Белорусский государственный университет
информатики и радиоэлектроники»
Кафедра информационных технологий автоматизированных систем
КОНТРОЛЬНАЯ РАБОТА
ВАРИАНТ №21
По дисциплине
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Выполнил: Лещенко Станислав Владимирович
Студент 4 курса ФЗО, специальности ИТиУвТС
Группа 802401
г. Минск, пр. газеты «Правда» д.54, кв. 26
дом. тел. 270-59-70
e-mail:mobylka@gmail.com
Проверил:
Хаджинов Михаил Касьянович
Минск 2011
Исходные данные:
|
Номер варианта |
|
|
|
|
|
|
21 |
0,06 |
0,7 |
0,6 |
6,5 |
3 |

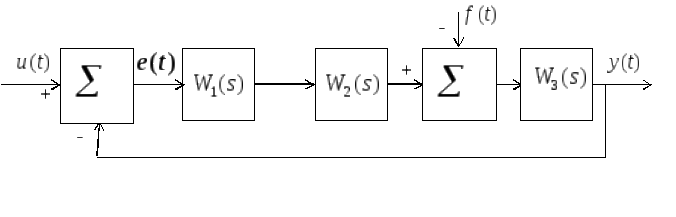
Структурная схема линейной САУ имеет вид:
Передаточные функции имеют вид апериодических звеньев:
![]() ;
;
![]()
![]() ;
;
![]()
Параметры
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() соответствуют
варианту. Размерность
соответствуют
варианту. Размерность
![]() в с,
в с,
![]() ,
,
![]() −
безразмерные величины. Величина
коэффициента
−
безразмерные величины. Величина
коэффициента
![]() выбирается из условия обеспечения
устойчивости.
выбирается из условия обеспечения
устойчивости.
Решение:
-
Требуемые передаточные функции находят с использованием правил структурных преобразований.
![]() при
при
![]() ,
,
![]() (разомкнута главная обратная связь)
(разомкнута главная обратная связь)
![]() при
при
![]() главная передаточная
функция замкнутой системы
главная передаточная
функция замкнутой системы

![]() при
при
![]() передаточная функция замкнутой системы
по ошибке
передаточная функция замкнутой системы
по ошибке
![]()
![]() при
при
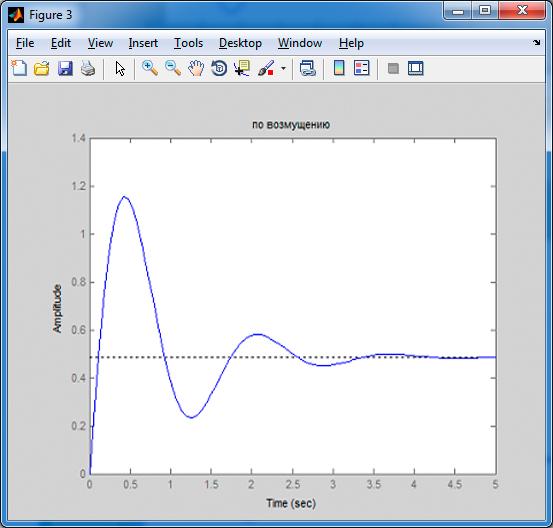
![]() передаточная функция замкнутой системы
по возмущению
передаточная функция замкнутой системы
по возмущению

-
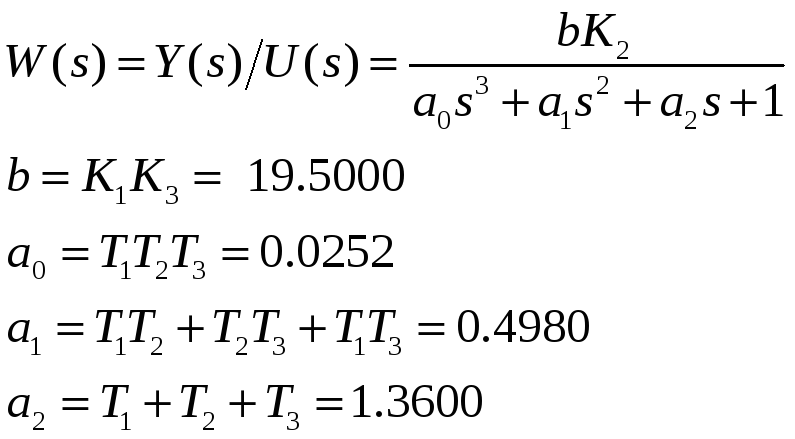
 , где
, где
 − общий коэффициент передачи прямой
цепи,
− общий коэффициент передачи прямой
цепи,
 полином относительно
полином относительно
 ,
то характеристическое уравнение
замкнутой системы имеет вид:
,
то характеристическое уравнение
замкнутой системы имеет вид:
![]() .
.
Условие
устойчивости в соответствии с критерием
Гурвица для системы третьего порядка
имеет вид
![]() ,
,
![]() .
При заданных
.
При заданных
![]() из полученных условий устойчивости
определяем ограничение на величину
коэффициента передачи
из полученных условий устойчивости
определяем ограничение на величину
коэффициента передачи
![]() и принимаем далее
и принимаем далее
![]() .
.
Тогда
![]() ,
и следовательно примем
,
и следовательно примем
![]()
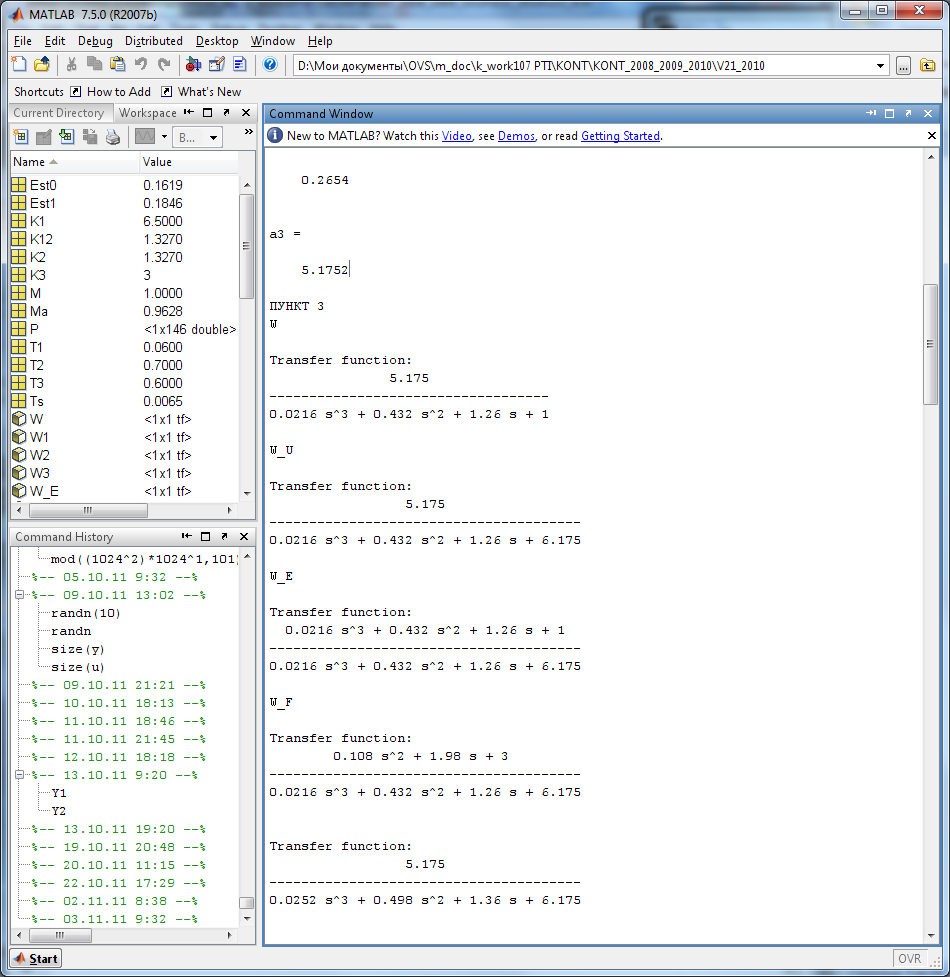
3. Найдем командой feedback передаточные функции замкнутой системы по управлению, по возмущению, по ошибке:
4. Найти аналитические выражения и построить графики:
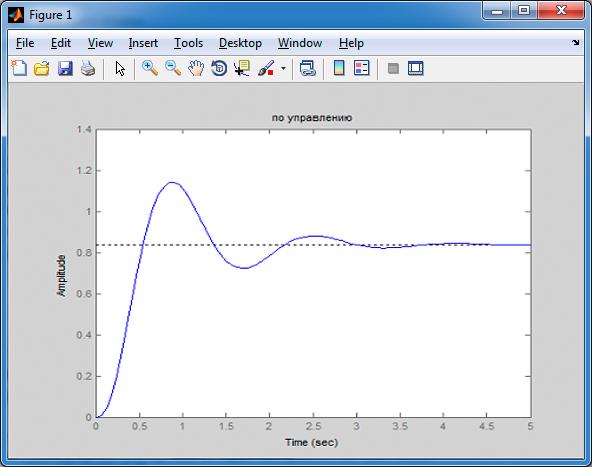
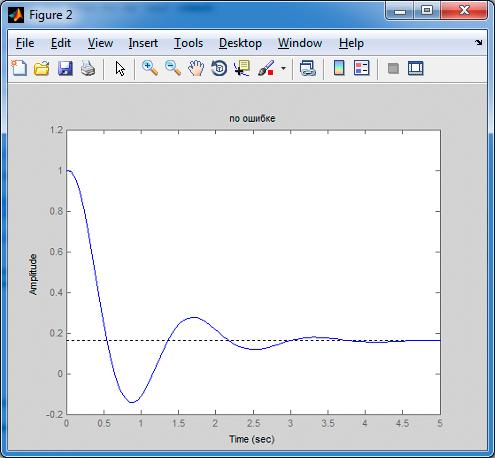
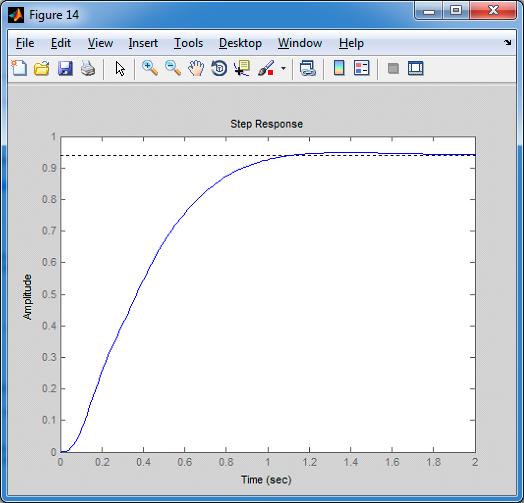
h(t) – переходные характеристики замкнутой системы по управлению, по возмущению, по ошибке; командой step – на ступенчатое воздействие
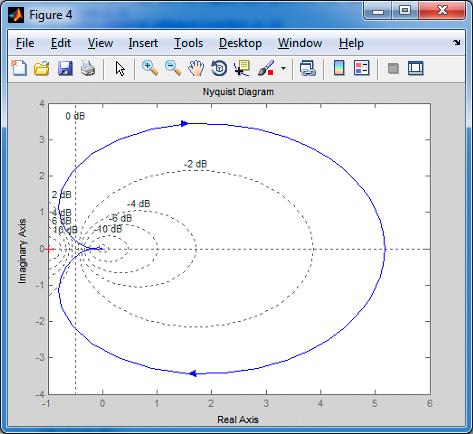
АФЧХ разомкнутой системы
АФЧХ разомкнутой системы
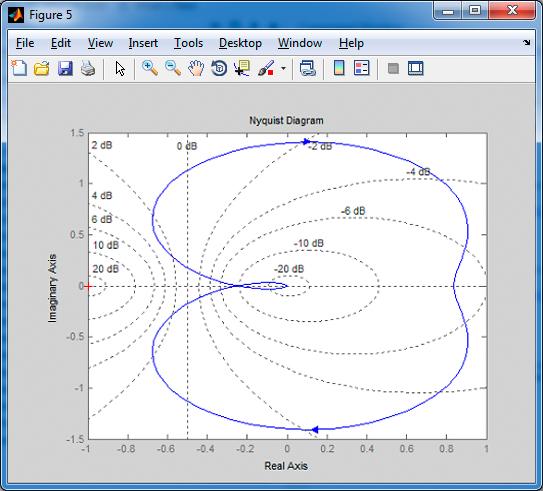
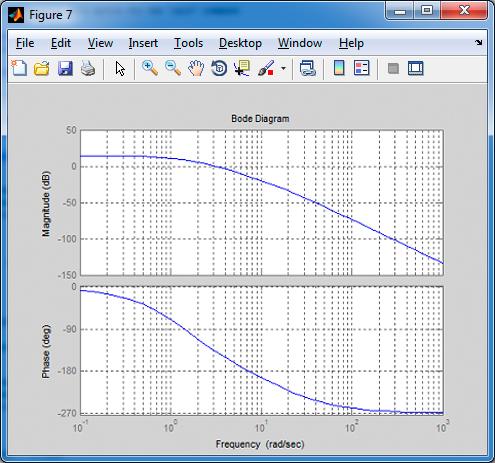
АФЧХ замкнутой системы
Построим
ЛАЧХ замкнутой системы
![]()
АЧХ разомкнутой системы
![]()
ФЧХ разомкнутой системы
![]()
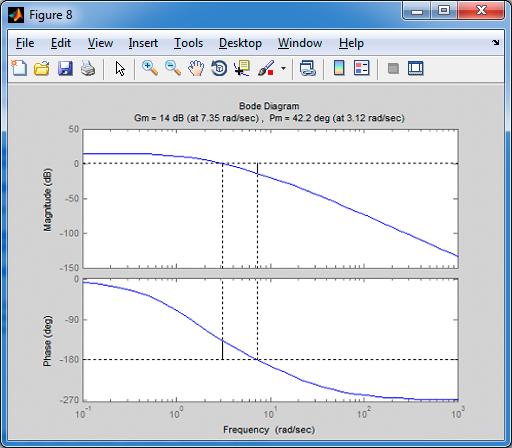
ЛАЧХ разомкнутой системы
![]()
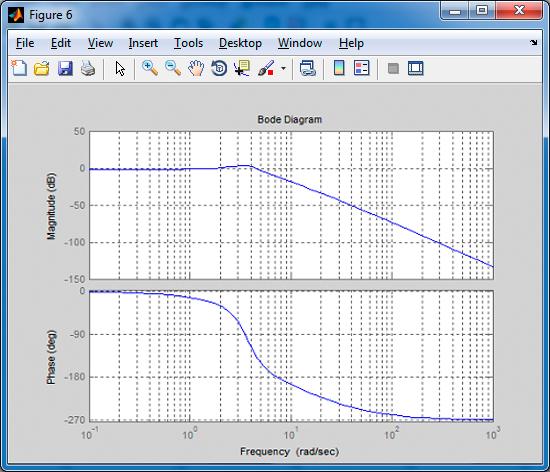
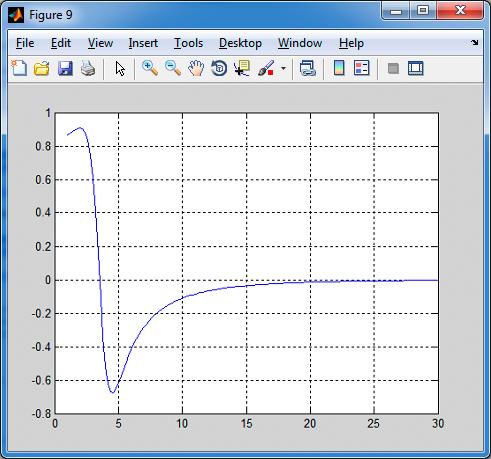
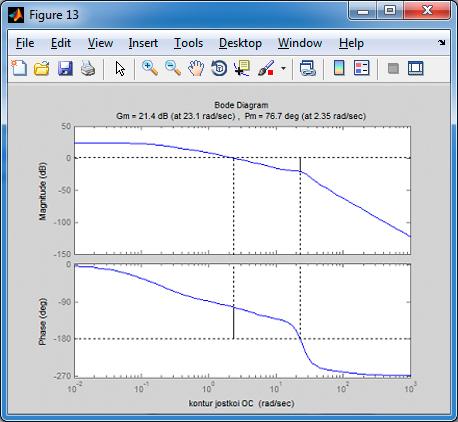
Диаграмма Bode разомкнутой системы
Если система устойчива в разомкнутом состоянии, то условие устойчивости замкнутой системы сводится к требованию, чтобы амплитудно-фазовая характеристика замкнутой системы не охватывает точку (-1;0*j).
Для систем устойчивых в разомкнутом состоянии логарифмический критерий устойчивости Найквиста сводится к тому, что ЛАЧХ должна пересечь ось абсцисс раньше, чем фаза спадая, окончательно перейдет значение -, или на частоте среза величина фазы должна быть меньше .
При
проектировании САУ рекомендуется
![]()
Исходя из
диаграммы Bode
![]() .
.
Система, которая теоретически является устойчивой, но находится близко к границе устойчивости, практически при её реализации может оказаться неустойчивой, как вследствие неточности мат.описания системы, использованного при оценке устойчивости, так и из-за применения во времени параметров системы. Поэтому обеспечение запасов устойчивости является важным.
5. Используя полученные и построенные характеристики, найдем и оценим следующие показатели качества системы:
5.1
![]()
![]() статическая
ошибка при подаче на ее входе единичного
ступенчатого воздействия
статическая
ошибка при подаче на ее входе единичного
ступенчатого воздействия
Коэффициенты ошибок полностью определяют
зависимость вынужденной ошибки от
структуры системы автоматического
управления. Если воздействие
![]() есть величина постоянная, т. е.
есть величина постоянная, т. е.
![]() ,
,
то вынужденная ошибка равна
![]() ,
,
где
 .
.
Коэффициенты ошибок
![]() равны
равны
![]() -м
производным от передаточной функции
ошибки при
-м
производным от передаточной функции
ошибки при
![]() .
.
Эта ошибка называется установившейся или статической.
Величина статической ошибки пропорциональна величине постоянного внешнего воздействия.
Системы автоматического управления, имеющие статическую ошибку, называются статическими.
 и С(0)= 0.1141,
и С(0)= 0.1141,
 и С(1)= 0.1375.
и С(1)= 0.1375.
5.2 частоту среза системы
![]() ,
запасы устойчивости системы по амплитуде
,
запасы устойчивости системы по амплитуде
![]() и фазе
и фазе
![]() - определены ранее на Figurе
6
- определены ранее на Figurе
6
![]() и Figurе 8
и Figurе 8
![]()
5.3 показатель колебательности
системы
![]()
Колебательность системы характеризуется
числом колебаний регулируемой величины
за время переходного процесса
![]() .
Если за это время переходный процесс в
системе совершает число колебаний
меньше заданного по условиям технологии,
то считается, что система имеет требуемое
качество регулирования в части ее
колебательности.
.
Если за это время переходный процесс в
системе совершает число колебаний
меньше заданного по условиям технологии,
то считается, что система имеет требуемое
качество регулирования в части ее
колебательности.
Для
оценки запаса устойчивости можно
использовать один критерий, который
назван показателем колебательности.
Показателем колебательности называется
значение ординаты
![]() амплитудной характеристики замкнутой
системы при начальной ординате, равной
единице.
амплитудной характеристики замкнутой
системы при начальной ординате, равной
единице.
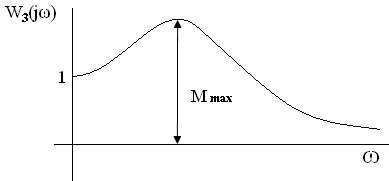
Показатель колебательности определяется модулем частотной передаточной функции замкнутой системы, максимальное значение этого модуля
 .
.
Чем меньше запас устойчивости, тем больше склонность системы к колебаниям и тем выше резонансный пик частотной характеристики. В хорошо демпфированных системах автоматического управления показатель колебательности находится в диапазоне 1.1−1.5.
Показатель
колебательности системы
![]() находим
из [M,wm]=norm(sys,inf)
– max модуля частотной
характеристики (показатель колебательности
M) и соответствующую
частоту wm
находим
из [M,wm]=norm(sys,inf)
– max модуля частотной
характеристики (показатель колебательности
M) и соответствующую
частоту wm
На графике Figure 6 он составляет M= 1.4155 раз wm= 3.3778.
5.4 время регулирования
![]() и перерегулирования
и перерегулирования
![]() .
.
Система
склонна к колебаниям, следовательно,
запас устойчивости можно охарактеризовать
максимальным значением выходного
параметра
![]() .
Этот параметр хорошо согласуется с
максимальными выбросами технологических
параметров. Для оценки систем управления
на основании данного параметра
используется так называемое
перерегулирование:
.
Этот параметр хорошо согласуется с
максимальными выбросами технологических
параметров. Для оценки систем управления
на основании данного параметра
используется так называемое
перерегулирование:
 ,
,
где
![]() − установившееся значение выходного
параметра на единичное воздействие.
− установившееся значение выходного
параметра на единичное воздействие.
В большинстве случаев считается, что запас устойчивости, является достаточным, если величина перерегулирования не превышает 10−30%.
Быстродействие системы можно определить по длительности переходного процесса.
Длительность переходного процесса определяется как время от момента приложения на входе системы единичного скачка до того момента, когда начнет выполняться условие
![]() ,
,
где
![]() −
заданная допустимая ошибка.
−
заданная допустимая ошибка.
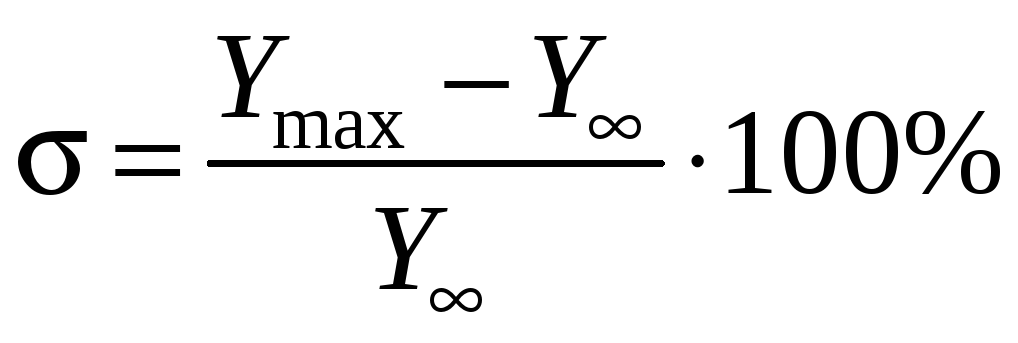
![]()
вещественная частотная характеристика
замкнутой системы
вещественная частотная характеристика
замкнутой системы


Перерегулирование σ(Pmax=0.93)=15%, tp=2.5π/wc=2.52c
6. Решим задачу коррекции неустойчивой системы с помощью обратной связи. Для этого задаём К2=3*К2гр для третьих 30 вариантов (из условия)
Вычисляем частоту среза wc неустойчивого контура управления по ЛАХ.
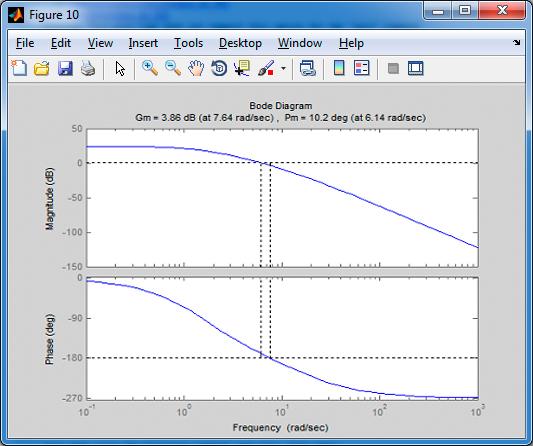
Убеждаемся в устойчивости контура гибкой обратной связи

Просматриваем, на ЛАХ как обратной характеристикой обратной связи отсекается часть спектра объекта
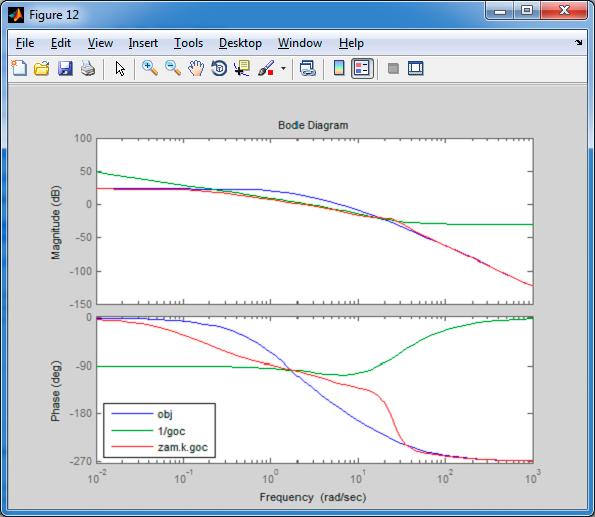
Так как замкнутый контур гибкой обратной связи подлежит замыканию жёсткой (единичной) обратной связью, то проверяем и его на устойчивость
Для вычисления показателя колебательности M замкнутой системы используем команду вычисления максимума АЧХ который в системе с гибкой обратной связью обычно равен единице.
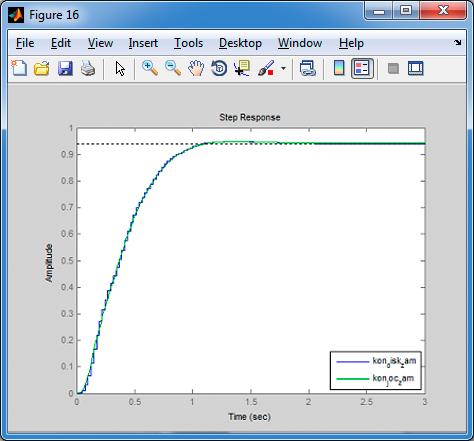
По графику переходной характеристики замкнутой системы вычислить перерегулирование и длительность переходной характеристики, которая будет близка к 5/wc или 4/wc при выбранных параметрах коррекции.
Перерегулирование практически отсутствует, а длительность переходного процесса ~1-1.2с
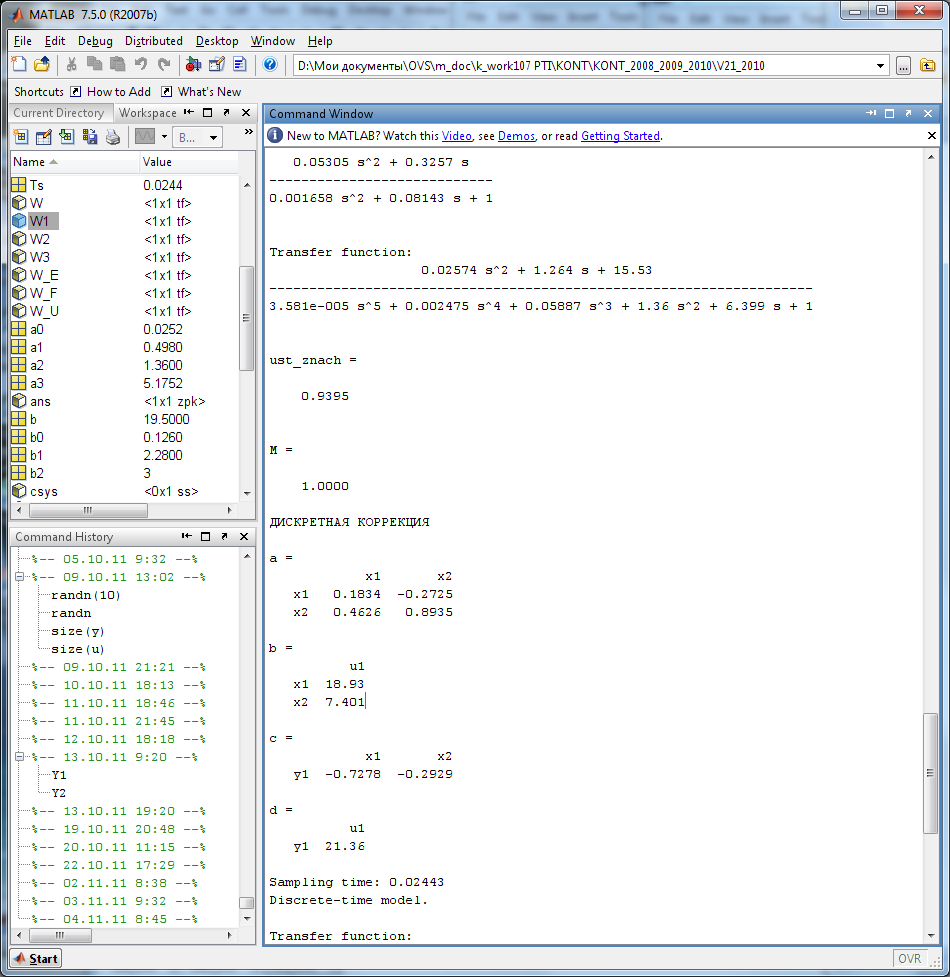
7. Дискретная реализация коррекции.
Близость дискретной и непрерывной обратных связей следует обязательно проконтролировать по частотным характеристикам

Убеждаемся по переходным характеристикам дискретного контура, что он получился достаточно близким к непрерывному контуру
8. Найти дифференциальное уравнение замкнутой системы
Тогда:
![]()
или
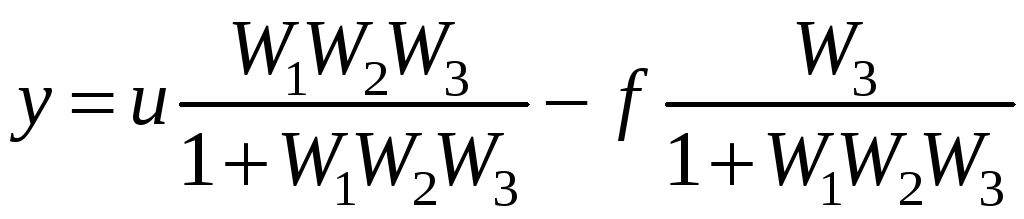
С учетом введенных раньше обозначений, а также обратного преобразования Лапласа уравнение имеет вид

Для f=0 получаем

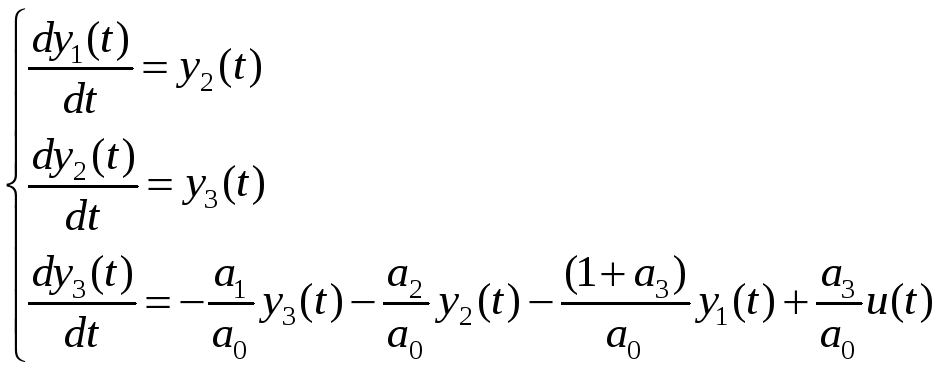
9. Найти уравнения состояния замкнутой системы в векторно-мат-ричном виде.
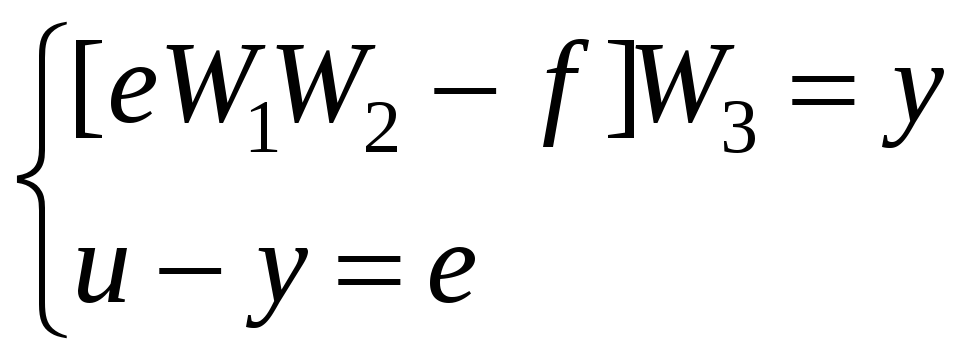
Составляем систему уравнений
Тогда в векторно-матричной форме
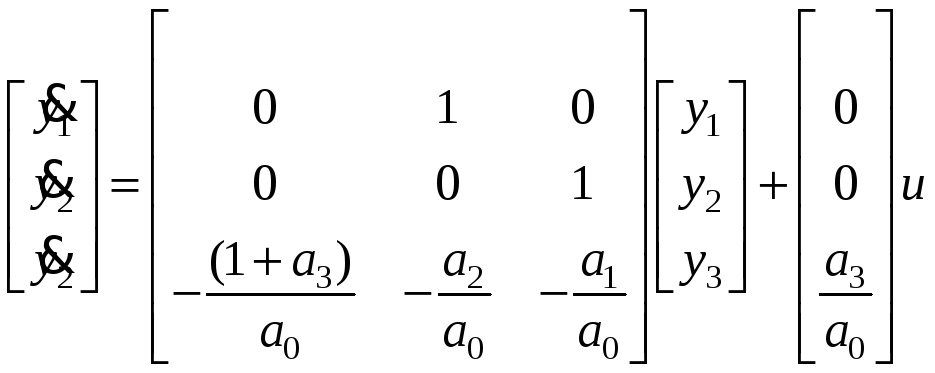
или
![]() .
.
СПИСОК ЛитературЫ
|
|
|
|
|
|
|
|
|
|
|
|