4.Удаление невидимых элементов
Задача удаления невидимых линий (hidden lines) и поверхностей (hidden surfaces) является одной из наиболее сложных в машинной графике. Сложность задачи привела к появлению большого числа различных способов ее решения. Наилучшего решения общей задачи удаления невидимых линий и поверхностей не существует.
Существует тесная взаимосвязь между скоростью работы алгоритма и детальностью его результатов. Ни один из алгоритмов не может достигнуть хороших оценок для этих двух показателей одновременно. Все алгоритмы удаления невидимых элементов включают в себя сортировку. Главная сортировка ведется по геометрическому расстоянию от тела, поверхности, ребра или точки до точки наблюдения. Основная идея, положенная в основу сортировки по расстоянию, заключается в том, что чем дальше расположен объект от точки наблюдения, тем больше вероятность, что он будет полностью или частично заслонен одним из объектов, более близких к точке наблюдения. После определения расстояний или приоритетов по глубине проводится сортировка по горизонтали и по вертикали. Эффективность любого алгоритма удаления невидимых элементов в большой степени зависит от эффективности процесса сортировки.
Алгоритмы удаления невидимых линий или поверхностей можно классифицировать по способу выбора системы координат или пространства, в котором они работают. Алгоритмы, работающие в объектном пространстве, имеют дело с физической системой координат, в которой описаны эти объекты. Такие алгоритмы особенно полезны в тех приложениях, где необходима высокая точность. Алгоритмы, работающие в пространстве изображения, имеют дело с системой координат того устройства, но котором объекты визуализируются. Точность ограничена разрешающей способностью устройства.
4.1.Алгоритм Робертса
Алгоритм Робертса представляет собой первое известное решение задачи об удалении невидимых линий (1963 г.) для векторных устройств вывода графической информации. Метод работает в объектном пространстве.
Метод требует, чтобы моделируемое тело было выпуклым. Невыпуклые объекты должны быть расчленены на выпуклые, для каждого из которых осуществляются необходимые расчеты. Суть алгоритма заключается в том, что на основании расчета нормалей к каждой грани объекта все грани, имеющие неположительные нормали по отношению линии наблюдения, полагаются нелицевыми. Разделение граней объекта на лицевые и нелицевые позволяет решить вопрос о видимости ребер.
Алгоритм Робертса для обработки геометрической модели отдельного объекта, включающей топологические отношения, введенные во 2-ом разделе настоящего курса, имеет следующий вид.
2) Для каждого ребра, исходя из топологического отношения A(F), выполнить:
|
В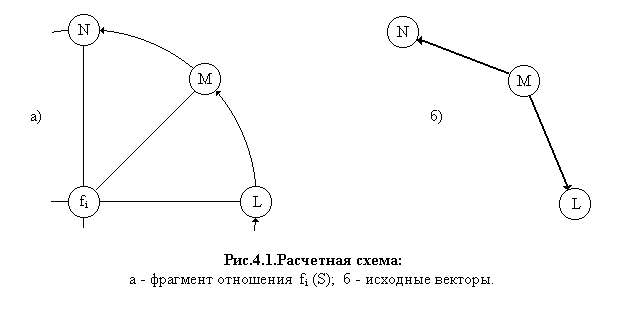 идовые
преобразования, включая проекционные,
необходимо проводить до начала определения
нелицевых граней. При этом следует
выполнять полное проекционное
преобразование без проецирования на
координатную плоскость.
идовые
преобразования, включая проекционные,
необходимо проводить до начала определения
нелицевых граней. При этом следует
выполнять полное проекционное
преобразование без проецирования на
координатную плоскость.
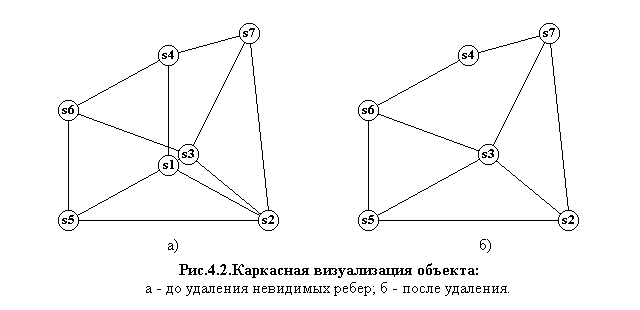
В таблицах 4.1 и 4.2 приведены расчетные данные по определению видимости граней и ребер модели (рис.2.1), подвергшейся преобразованиям поворотов и изометрии (табл.3.4). На рис.4.2 представлена каркасная визуализация рассчитанной модели.
Табл.4.1.Последовательность действий по определению признаков видимости
|
F |
F(S) |
L |
M |
N |
xL |
yL |
xM |
yM |
xN |
yN | |||
|
f1 |
s2 |
s1 |
s4 |
s7 |
s2 |
s1 |
s4 |
120a |
20b |
70a |
70b |
70a |
170b |
|
f2 |
s1 |
s2 |
s5 |
|
s1 |
s2 |
s5 |
70a |
70b |
120a |
20b |
20a |
20b |
|
f3 |
s3 |
s2 |
s7 |
|
s3 |
s2 |
s7 |
80a |
80b |
120a |
20b |
110a |
190b |
|
f4 |
s2 |
s3 |
s5 |
|
s2 |
s3 |
s5 |
120a |
20b |
80a |
80b |
20a |
20b |
|
f5 |
s6 |
s3 |
s7 |
s4 |
s6 |
s3 |
s7 |
20a |
120b |
80a |
80b |
110a |
190b |
|
f6 |
s5 |
s6 |
s4 |
s1 |
s5 |
s6 |
s4 |
20a |
20b |
20a |
120b |
70a |
170b |
|
f7 |
s3 |
s6 |
s5 |
|
s3 |
s6 |
s5 |
80a |
80b |
20a |
120b |
20a |
20b |
граней по алгоритму Робертса
|
F |
yM-yN |
yN-yL |
yL-yM |
xL(yM-yN) |
xM(yN-yL) |
xN(yL-yM) |
nZ |
видимость |
|
f1 |
-100b |
150b |
-50b |
-12000ab |
10500ab |
-3500ab |
<0 |
- |
|
f2 |
0 |
-50b |
50b |
0 |
-6000ab |
1000ab |
<0 |
- |
|
f3 |
-170b |
110b |
60b |
-13600ab |
13200ab |
6600ab |
>0 |
+ |
|
f4 |
60b |
0 |
-60b |
7200ab |
0 |
-1200ab |
>0 |
+ |
|
f5 |
-110b |
70b |
40b |
-2200ab |
5600ab |
4400ab |
>0 |
+ |
|
f6 |
-50b |
150b |
-100b |
-1000ab |
3000ab |
-7000ab |
<0 |
- |
|
f7 |
100b |
-60b |
-40b |
8000ab |
-1200ab |
-800ab |
>0 |
+ |
Табл.4.2.Определение видимости ребер по алгоритму Робертса
|
A |
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
a7 |
a8 |
a9 |
a10 |
a11 |
a12 |
|
A(F) |
f2 |
f7 |
f6 |
f4 |
f1 |
f6 |
f3 |
f5 |
f2 |
f5 |
f1 |
f4 |
|
f1 |
f5 |
f7 |
f3 |
f5 |
f2 |
f1 |
f6 |
f4 |
f3 |
f6 |
f7 | |
|
Видимость |
- |
+ |
- |
+ |
- |
- |
+ |
+ |
- |
+ |
- |
+ |
|
граней |
- |
+ |
+ |
+ |
+ |
- |
- |
- |
+ |
+ |
- |
+ |
|
ребер |
- |
+ |
+ |
+ |
+ |
- |
+ |
+ |
+ |
+ |
- |
+ |