

31 Основные метролог характеристики циу.
Статические:
погрешность дискретности (квантования)
чувствительности
реализации уровней квантования
от действия помех
Погрешность дискретности.
Измеряемая величина отождествляется с ближайшим большим или равным уровнем.

С ближайшим меньшим или равным.

С ближайшим уровнем.
Погрешность квантования – методическая. Систематическая – мат ожидание.
Погрешность чувствительности. Возникает в следствии неидеальности сравнивающего устройства.
![]()
Погрешность от реализации уровней квантования.
![]()
Δд – методическая; Δч, Δр – инструментальная
Если смещение
уровней квантования зависит от номера
уровня, то погрешность
![]() .
.
Погрешность, возникающая при квантовании временного интервала. При измерении временного интервала используются квантующие импульсы известной частоты.

Погрешности от временного сдвига старт- и стоп-импульсов относительно квантующего.
![]()
Старт-импульс синхронизируют с половиной периода квантующего импульса.
Класс точности c/d.
34 Время-импульсный цифровой вольтметр. (+30)

Измеряемое Ux преобразуется во временной интервал Tx, который в свою очередь измеряется путем квантования импульсами стабильной частоты f0 и подсчетом этих импульсов за время tx преобразуется в код.
Угол наклона Uk или скорость его формирования известны.
Источник погрешностей ВИЦВ.
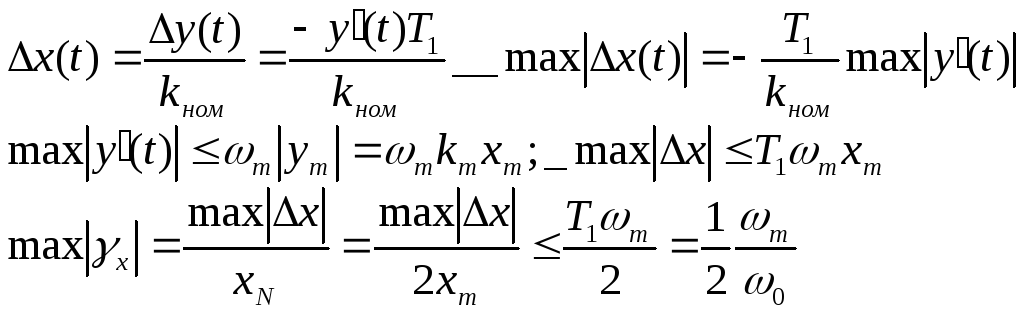
32 – 33 Динамические погрешности ЦИУ.
![]() - динамическая
погрешность первого рода, обусловлена
апериодическими свойствами входной
цепи.
- динамическая
погрешность первого рода, обусловлена
апериодическими свойствами входной
цепи.
Пусть преобразование
аналоговой величины в квантованную
происходит методом последовательного
счета.
![]() определяется временем преобразования.
определяется временем преобразования.
![]() ,
где М1 – модуль максимум первой производной
сигнала – скорость его изменения.
,
где М1 – модуль максимум первой производной
сигнала – скорость его изменения.
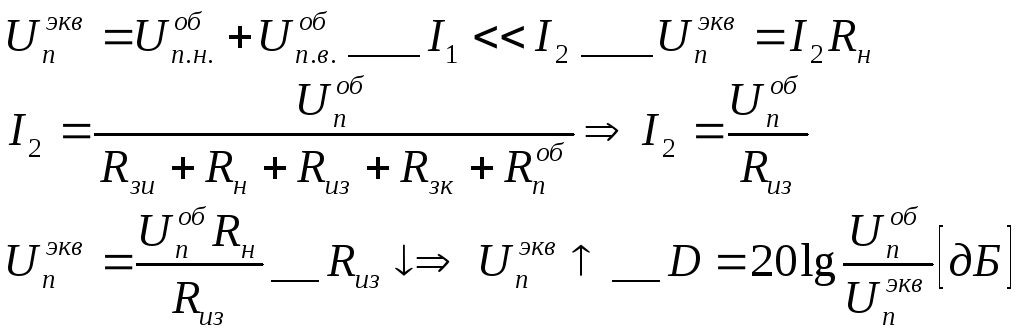
Помехоустойчивость – способность устройства функционировать при действии помех.
Помехозащищенность ЦИП – способность устройства производить измерения с требуемой точностью.

Uпн – источник действия помехи нормального вида
Ux – измеряемый источник
Uпоб – эквивалентный источник помехи общего вида
Rв, Rн – сопротивление соединительных проводов
Rиз – сопротивление изоляции
Rзк – сопротивление заземления контура
Rзи – сопротивление заземления источника
Помеха нормального вида – наводка на соединительные провода, суммируется с входным измеряемым сигналом.
Помеха общего вида – разность потенциалов между точками заземления источника
Помеха нормального вида имеет гармонический характер. Борьба с ней за счет интегрирования входного сигнала.
Некоторые сведения из теории вероятности.
Первый начальный момент – мат ожидание – центр группирования с.в.
Второй центральный момент – дисперсия – степень рассеивания с.в.
13 – 14 Динамический режим средства измерения.
Дифференциальное уравнение
Переходные и импульсно-переходные характеристики
Частотные характеристики
Передаточные функции
Поведение средства измерения в динамическом режиме может быть описано линейным неоднородным дифференциальным уравнением с постоянными коэффициентами.
![]()
Пусть статическая погрешность равна 0.

Общее решение
невозможно. Удобно рассмотреть поведение
средства измерения отдельно для
переходного и установившегося режима.
Для устойчивых средств измерения
свободные колебания носят затухающий
характер. Время установления показаний
выбирается таким, чтобы режим свободных
колебаний уже закончился, тогда
![]() .
В случае, если дифференциальное уравнение,
описывающее средство измерения, имеет
высокий порядок, то оно разбивается на
динамические звенья меньших порядков.
.
В случае, если дифференциальное уравнение,
описывающее средство измерения, имеет
высокий порядок, то оно разбивается на
динамические звенья меньших порядков.
Динамическое звено первого порядка.
![]()
Постоянная времени, граничная частота.
Пусть
![]() ,
а также имеет ограниченный спектр.
,
а также имеет ограниченный спектр.
Дает завышенную оценку, поэтому им следует пользоваться при малых значениях отношения частот.
Если спектр не ограничен, то используется описание в виде переходных и импульсных характеристик.
Динамическое звено первого порядка. Входной сигнал 1(t).

Когда стрелка
устанавливается на середину шкалы,
![]()
Задаваясь допустимой погрешностью можно определить значение времени установления показаний.
![]() весовая функция.
весовая функция.
В основе частотных методов описания средств измерения в динамическом режиме лежит использование частотных характеристик СИ: АЧХ и ФЧХ.
В основе описания динамического режима передаточными функциями лежит преобразование Лапласа.
15 -16 Вероятностное описание погрешностей.
![]() не случайная
величина – центр рассеивания значения
погрешности при повторных измерениях.
Систематическая
погрешность
– оценка смещения результатов относительно
истинного значения.
не случайная
величина – центр рассеивания значения
погрешности при повторных измерениях.
Систематическая
погрешность
– оценка смещения результатов относительно
истинного значения.
![]() Дисперсия
погрешности
– степень разброса значений погрешности
относительно мат ожидания. Поскольку
разброс определяется только случайной
составляющей, то можно приравнять
Дисперсия
погрешности
– степень разброса значений погрешности
относительно мат ожидания. Поскольку
разброс определяется только случайной
составляющей, то можно приравнять
![]()
![]() Числовая характеристика
точности измерений, всегда положительна
и выражается в единицах измеряемой
величины.
Числовая характеристика
точности измерений, всегда положительна
и выражается в единицах измеряемой
величины.
Нормальный закон распределения. Закон Гаусса.

Чем меньше СКО, тем точнее проведены измерения.
Равномерный закон распределения. В цифровых измерительных приборах.
Трапециидальный закон – композиция нескольких равномерных.
Треугольный закон. Если границы равномерных совпадают.
Наиболее употребительным законом распределения является нормальный, т.к. по центральной предельной теореме т.в. несколько слагаемых со своими законами распределения дадут нормальный закон, если ни одно из них не преобладает.
Доверительный интервал. Доверительная вероятность.
СКО не может быть оценкой максимальной погрешности, т.к. максимальная погрешность зависит от СКО и зависит от закона распределения погрешности, следовательно, можно говорить о интервале, за который не выйдет значение погрешности с некоторой вероятностью. 0.5; 0.8; 0.9; 0.98; 0.99; 0.9973; 0.999.
Доверительный интервал и доверительная вероятность выбираются исходя из условий проведения измерительного эксперимента.
Достоинство ДИ заключается в том, что он может быть выбран и оценен прямо по экспериментальным данным.
Суммирование погрешностей.
Суммарная погрешность складывается из суммы составляющих погрешностей. Для ее оценки можно использовать M, D, СКО
МО
 .
Делают допущение, 0 если нет и 1 если
есть.
.
Делают допущение, 0 если нет и 1 если
есть. zpi
берется из таблиц для нормально
распределенных с.в. с требуемой
вероятностью рi
zpi
берется из таблиц для нормально
распределенных с.в. с требуемой
вероятностью рi
 (*)
– арифметическое суммирование
погрешностей
(**) – геометрическое
(*)
– арифметическое суммирование
погрешностей
(**) – геометрическое
Использование арифметического суммирования дает завышенную оценку погрешности, поскольку реальные значения rij от 0 до 1.
Границы доверительного интервала симметричны лишь при Δхс=0.
Так как знак ΔUс как правило неизвестен, а пользоваться несимметричными границами неудобно, то границы выбирают максимальными. Поскольку выход за границы интервала значений погрешности наблюдается лишь с одной стороны, то вероятность выхода погрешности за границы доверительного интервала уменьшается в 2 раза.
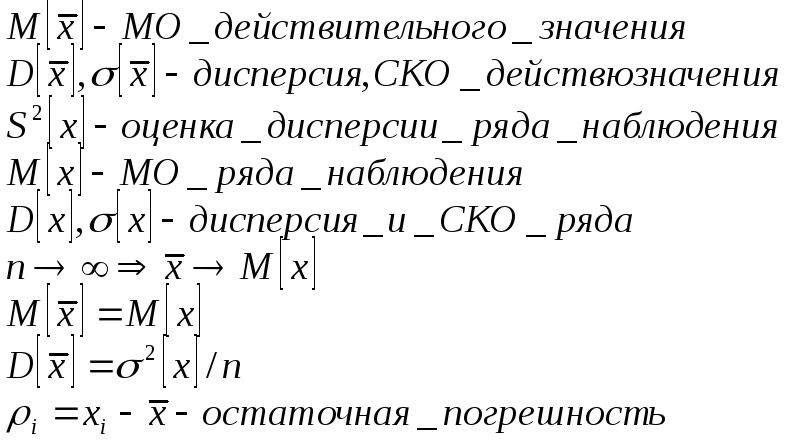
35 Обработка результатов измерений.
Цель измерения – установление значений измеряемой величины и оценка погрешности результата. Мат ожидание закона распределения измеряемой величины смещено с истинного значения на величину систематической погрешности. А дисперсия этого закона полностью определяется дисперсией случайной погрешности.
Последовательность шагов.
Получение экспериментальных данных
Оценка мат ожидания
Оценка систематической погрешности
Исключение систематической погрешности из ряда наблюдений, т.е. получение исправленного ряда
Получение оценки измеряемой величины близкой к истинному значению
Определение оценки дисперсии случайной погрешности.
Случай прямых измерений.
За оценку мат ожидания принимается среднее арифметическое значение результата измерения.
1. Дисперсия известна. 2. Нет
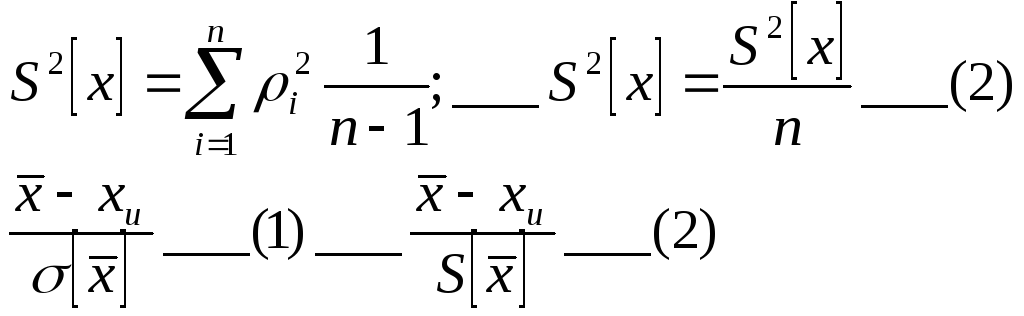
Для определения доверительного интервала погрешности необходимо определить закон распределения первой или второй дроби. Если xi распределен по нормальному закону, то закон распределения дроби также нормальный.
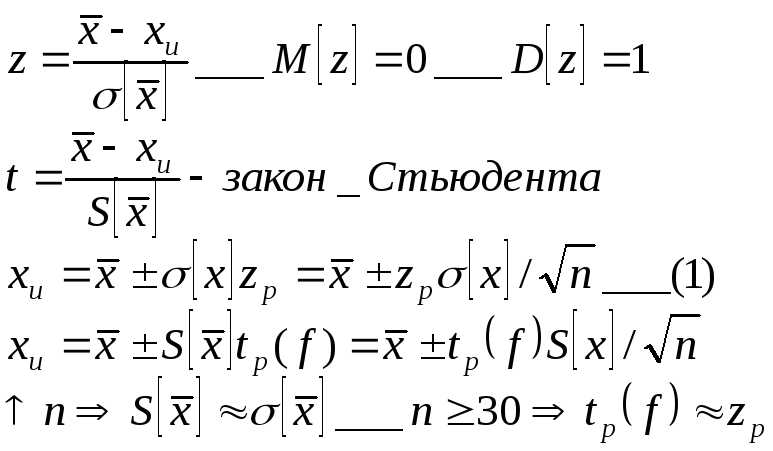
В случае, если закон распределения не нормальный, то увеличивают n и используют табличные значений доверительных интервалов.
Промах – значительно отличается от остальных значений. Критерий:

Два момента, накладывающие ограничение на размер выборки:
поскольку увеличение числа измерений влечет увеличение времени проведения эксперимента, то должна быть уверенность в том, что измеряемая величина не изменяется.
Изменение условий проведения измерительного эксперимента
![]()
18 Мосты для сопротивления на постоянном токе.
Одинарные, двойные.
Одинарные мосты для измерений средних значений сопротивления в диапазоне 10÷106 Ом. Это двух зажимная схема подключения сопротивления. Возможно расширить нижний предел до 10-3 Ом за счет 4-х зажимной схемы включения.

![]()
Сопротивление проводов и контактов влияет на нижнюю границу измеряемых сопротивлений. Большие сопротивления соизмеримы с сопротивлением изоляции.

rлi – сопротивления измерительных проводов
В двух зажимной системе есть rл1, rл4, точки 1 и 2, 3 и 4 соединяются между собой.
![]()
В 4-х зажимной
системе связи между 1 и 2, 3 и 4 нет
![]()
R2>> rл4, R3>> rл2, rл4 и rл4 не влияют на качество результатов.
В двойных мостах
диапазон 10-8÷1010
Ом. Мостовые схемы нормируются по
относительной погрешности
![]()
17 Измерительные мосты.
Строятся на основе метода сравнения с мерой.
Для измерения R, C, L, θ, а также для измерения других физических величин, которые могут быть определены с их использованием.
Мостовые схемы характеризуются высокой чувствительностью и высокой точностью. Подразделяются на:
мосты постоянного тока
мосты переменного тока
с ручным уравновешиванием
с автоматическим уравновешиванием

а,б – диагональ питания
в,г – измерительная диагональ
В измерительной диагонали используются либо нуль-индикаторы, либо средства измерения тока.

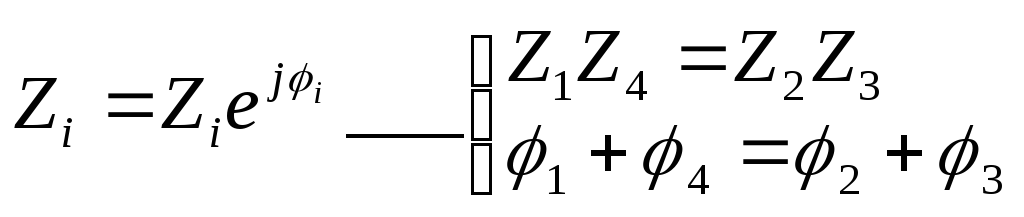
Условие равновесия мостовой схемы: I0=0, при этом Z1Z4=Z2Z3.
Произведение сопротивлений противоположных плеч моста равны между собой.
Мост постоянного тока: R1R4=R2R3
Мост переменного тока:
Сходимость моста – достижение состояния равновесия определенным (конечным) числом поочередных переходов от регулировки одного параметра к другому.
Мосты работающие в уравновешенном режиме, или в неуравновешенном.
Чувствительность по напряжению.

Ограничением на увеличение напряжения питания с целью увеличения чувствительности являются ограничения по рассеиваемой мощности в плечах моста.
Для переменного напряжения.
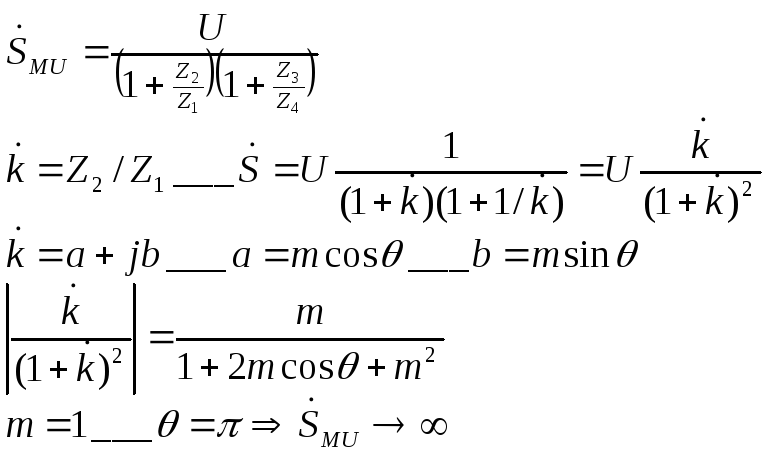
Мост должен быть симметричным: Z1=Z2, Z3=Z4, а угол сдвига фаз моста равен π.
Из-за наличия потерь в плечах моста выполняется лишь условное равенство θ≈±π.
19 -20 Мосты переменного тока для измерения емкости, тангенса угла потерь, индуктивности, добротности.
Измерение емкости и тангенса угла потерь.
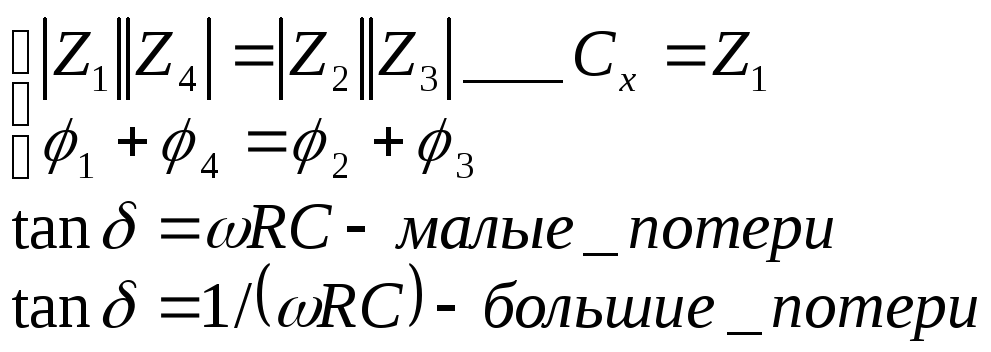

Угол потерь дополняет фазовый сдвиг до 90.
С малыми потерями.

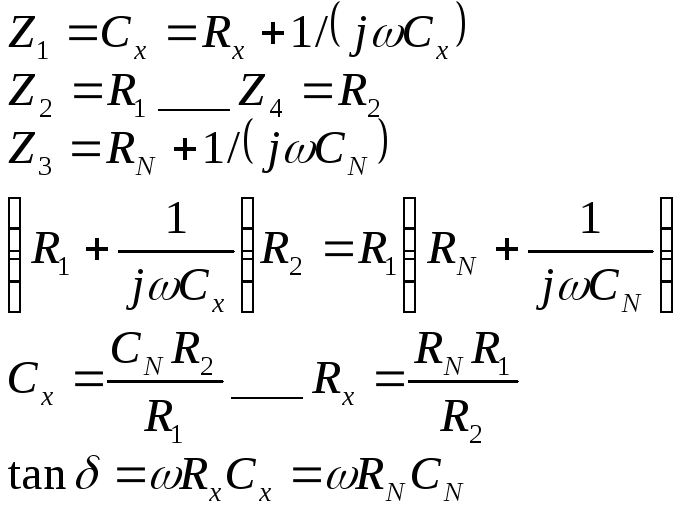
С большими потерями.

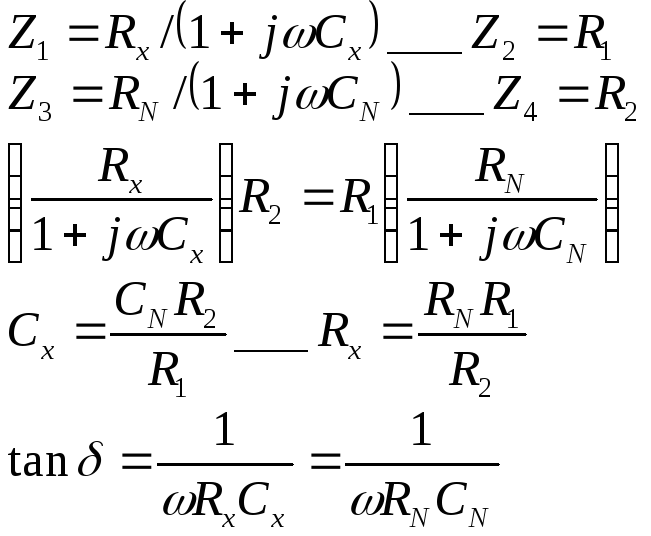
Если измерять большие потери последовательной схемой, нужно брать большое эквивалентное сопротивление, следовательно, уменьшается чувствительность мостовой схемы из-за уменьшения протекающего тока.
Мосты для измерения индуктивности и добротности.
Rx>RN

![]()
При Rx<RN
последовательно к Lx
подключают сопротивление R
![]()