

Современные задачи многомерного анализа в энцефалографии
.pdfСовременные задачи многомерного анализа в электроэнцефалографии
И. О. Жаринов (ФГУП СПб ОКБ "Электроавтоматика")
Обработка информационных процессов от датчиков электрофизиологического контроля в медико-биологическом эксперименте является основой инструментальных средств современных медицинских систем.
Известно, что процессы жизнедеятельности организма человека сопровождаются на поверхности кожного покрова соответствующими колебаниями электрического потенциала. Методика регистрации и последующего анализа таких потенциалов составляет основу большинства существующих неинвазивных средств диагностики: метода электрокардиографии, метода электромиографии, метода электроокулографии и т.д.
Особое место в группе электрографических методов анализа информационных процессов занимают работы в предметной области метода электроэнцефалографии объективного средства тестирования функций нервной системы человека.
Метод электроэнцефалографии заключается в визуальном, автоматизированном или автоматическом анализе реализаций, отводимых от различных точек поверхности головы по специальным стандартизованным системам отведений (см. рис. 1). Изменчивость и сложность характера траектории регистрируемого процесса определяет информационную составляющую, однозначно характеризующую функциональное состояние человека.
Рис. 1. Система отведений электроэнцефалографического процесса.
В соответствии с обобщенным феноменологическим описанием электроэнцефалографический информационный процесс во временной области характеризуется следующими свойствами:
− мгновенные значения реализации процесса распределены по нормальному закону:
{y[n*]}...n,,...n −N = ..., y[n-N], y[n-N+1], ..., y[n], ... ~ Nor(my ,σ2y );
− реализация процесса состоит из последовательности квазистационарных участков
234
сегментов различной длительности: |
|
|
|
|
|
|
||
{y[n*]}n,... |
−N |
≡ ..., segment (i) |
|
|
(i) , segment (i +1) |
|
|
(i+1) , ... ; |
|
|
|
|
|||||
...,n |
|
|
t =T |
|
|
t =T |
|
|
|
|
|
|
|
||||
− статистические характеристики реализации процесса скачкообразно изменяются от одного сегмента к другому:
..., y[n − N], y[n − N +1], ..., y[n − N + k], y[n − N + k +1], ..., y[n], ... ; |
|
14444444244444443 14444244443 |
|
segment (i) |
segment (i+1) |
− на квазистационарные участки ЭЭГ могут накладываться кратковременные нестационарные компоненты:
spike
6444447444448
..., y[n − N],..., y[n − N +s1],..., y[n − N +s2 ],..., y[n − N + k], y[n − N + k +1],..., y[n],... ;
1444444444442444444444443 14444244443
segment (i) |
segment (i+1) |
− для каждого конкретного индивидуума существует конечное число М отличающихся по статистическим свойствам процесса физиологических состояний, каждое из которых на реализации ЭЭГ сопровождается своим типом сегмента электроэнцефалографическим классом i=1, 2, ..., M.
Данная феноменологическая модель успешно используется при построении математических моделей ЭЭГ (см. рис. 2). Такую ЭЭГ можно разделить на взаимоисключающую последовательность сменяющих друг друга во времени электрографических феноменов сегментов с моментами изменения свойств процесса, отражающими процессы перехода функционального состояния головного мозга от одного микросостояния к другому в каждой точке отведения (см. рис. 3).
Распределение моментов изменения свойств ЭЭГ в различных отведениях формирует пространственно-временное "изображение", индицирующее направленный нестационарный характер распространения потенциалов с учетом свойства электрической проводимости коры и клеток головного мозга, а также индивидуальных физиологических особенностей и возможных органических поражений.
Учитывая, что методика регистрации ЭЭГ позволяет получать одновременно реализации с поверхности головы по целой системе отведений, перспективным оказывается развитие существующих подходов в исследовании показателей качества многомерных методов анализа. Специальные экспериментальные исследования “одновременности” моментов перехода ЭЭГ из класса в класс при параллельном одномерном анализе многоканальных записей на повышенной частоте дискретизации, показали, что “разладка” по каналам регистрации электроэнцефалографических процессов происходит не одновременно.
235
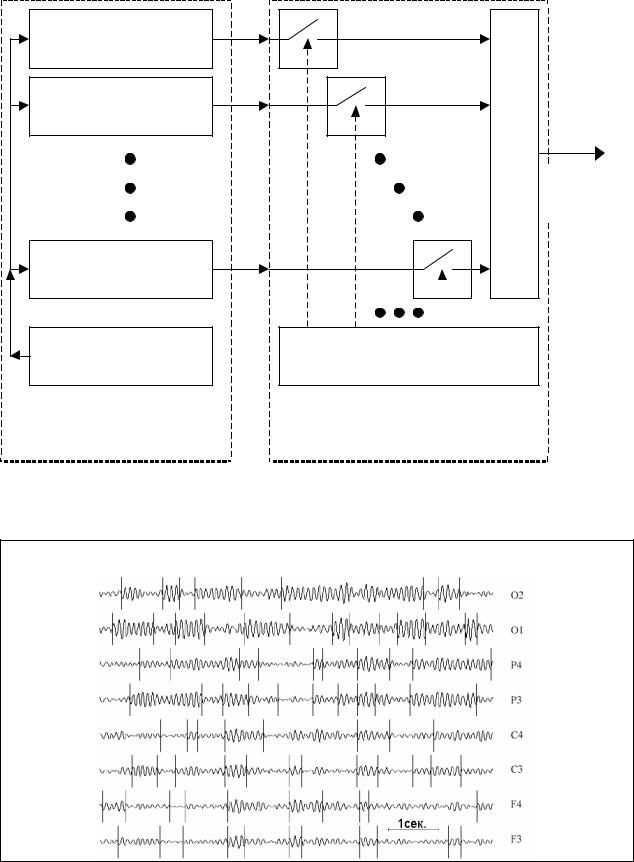
Формирующий фильтр
W(i)(z), i=1
Формирующий фильтр
W(i)(z), i=2
Формирующий фильтр
W(i)(z), i=М
Генератор случайного процесса x[n] типа : гауссовский белый шум
Медико-биологический формирователь процессов
Σ  Процесс y[n],
Процесс y[n],
 подлежащий
подлежащий  обработке
обработке
взаимоисключающий закон управления
Медико-биологический формирователь потока событий
Рис. 2. Эквивалентная схема формирования информационного процесса, подлежащего сегментному анализу в медико-биологическом эксперименте.
Рис. 3. Пример автоматической детекции моментов резких изменений мощности альфа−активности (вертикальные линии) в 8 стандартных отведениях ЭЭГ. Показана ЭЭГ после фильтрации в диапазоне 7.5-12.5 Гц.
236
Поэтому применение известных методов многомерного анализа стохастических процессов, иногда применяемых для анализа ЭЭГ, оказывается не всегда корректным. При этом в решающее правило необходимо вводить параметр “задержки” по каждому каналу и принимать решение о разделении во времени (сегментации) ЭЭГ отдельно. В известном смысле, такой подход, основанный на многоканальном последовательном анализе (с зависимыми или независимыми решениями) произвольного, но конечного числа М классов информационных процессов, позволяет подходить математически строго к решению “обратной задачи электроэнцефалографии” по времени запаздывания в каждом канале, соответствующем определенному пространственному положению электродов на поверхности головы, судить о происхождении отдельных классов, направленности характера их распространения и т. д. Такую задачу необходимо решать в рамках специального исследования в тесном сотрудничестве с экспертами: специалистами−электрофизиологами.
Литература
1. Воробьев С. А. Моделирование и структурный анализ сигналов с повторяющимися признаками формы в медико-биологическом эксперименте: Автореф. дисс. ... д-ра техн. наук: 05.13.09. Тула: ТулГУ, 2000.
2. Жаринов И. О. Авторегрессионный анализ в электроэнцефалографии. // Актуальные проблемы анализа и синтеза сложных технических систем. / 32-ая научная конференция профессорско-преподавательского состава СПбГУИТМО: Сб. докл., СПб.: ГУИТМО, 2003, вып.11 (научно-технический вестник), с. 187-193.
3. Жаринов И. О. Математико-статистические методы в задаче параметризации описания классов ЭЭГ-сигнала // Информационные, вычислительные и управляющие системы. / 31-ая научная конференция профессорско-преподавательского состава СПбГИТМО: Сб. докл., — СПб: ГИТМО, 2002, вып. 6 (научно-технический вестник), с. 207-209.
4. Шишкин С. Л. Исследование синхронности резких изменений альфа−ритма ЭЭГ человека: Автореф. дисс. ... к-та биол. наук: 03.00.13. М.: МГУ им. М. В. Ломоносова, 1997.
237

Многофункциональные индикаторы на плоских жидкокристаллических панелях: наукоемкие аппаратно-программные решения
П.П. Парамонов, Н.С. Копорский, Б.В. Видин, И. О. Жаринов (ФГУП СПб ОКБ "Электроавтоматика")
Введение
Конструирование современных систем бортового радиоэлектронного оборудования основано на отображении в реальном времени полетной информации на специализированных средствах индикации. Широкое распространение для визуализации пилотажно-навигационной информации получили многофункциональные цветные индикаторы МФЦИ.
Рис. 1. Многофункциональный цветной индикатор МФЦИ.
Благодаря введению больших жидкокристаллических (ЖК) экранов, а также кнопочного наборного поля качественно изменился подход к созданию систем индикации. Необходимую информацию (рабочий кадр) пилот получает нажатием определенной кнопки, функциональное назначение которой иллюстрируется на экране соответствующей подписью (транспарантом) и зависит от режима работы изделия и индикационной программы.
Многофункциональный цветной индикатор МФЦИ (см. рис. 1) представляет собой электронный блок индикации, в состав которого входят: вычислитель на базе производительного процессора; устройства ввода/вывода данных, обеспечивающее информационный обмен в составе комплекса по выбранным видам стандартизованных интерфейсов; интеллектуальный графический контроллер с библиотекой графических примитивов; устройство питания; устройство коммутации; ЖК-экран с системой подсвета и узлом подогревателя, обеспечивающие отображение полетной информации в суровых условиях наличия внешних воздействующих факторов.
МФЦИ решает на борту индикационные задачи и, в зависимости от реализованных аппаратно-программных средств, в состоянии обеспечивать индикацию не только вторичных параметров (после обработки сигналов в специализированных блоках преобразования), но и, при необходимости, первичных параметров полета летательного аппарата.
238
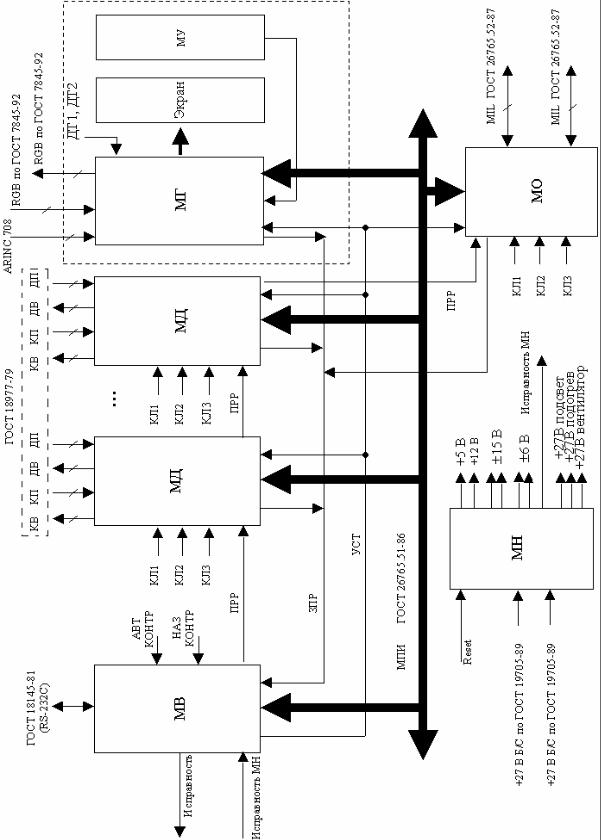 Рис. 2. Структурная схема типового индикатора МФЦИ.
Рис. 2. Структурная схема типового индикатора МФЦИ.
Состав и назначение.
Структурная схема индикатора МФЦИ выполняется по модульному принципу. Состав, номенклатура и количество модулей, входящих в аппаратуру, как правило, стандартизированы и определяются назначением и решаемыми задачами блока индикации в
239
составе каждой конкретной системы БРЭО. Типовая структурная схема бортового блока МФЦИ приведена на рис.2.
Модули, входящие в аппаратуру МФЦИ, по принципу работы с магистралью интерфейса разделяются на активные и пассивные. Активным модулем является модуль вычислителя МВ, выполняющий функции центрального процессора (ЦП), который в соответствии с рабочей индикационной программой или встроенными тестами контроля осуществляет запрос данных из магистрали, их прием, а также выдачу данных в магистральную шину.
Модули дискретного обмена МД, МО, а также модуль графический МГ являются пассивными и способны принять запрос от ЦП и выдать требуемые данные в магистраль, а также принять из магистрали данные, предоставленные процессором.
Обмен информацией с комплексом осуществляется через оконечные модули МД, МО. В модуле МВ формируется интегральный сигнал Исправность (с учетом исправности источника питания МН) как результат выполнения теста встроенного контроля.
Общие сведения о работе модулей.
Модуль МВ основной модуль-вычислитель индикационного оборудования. Предназначен для общей синхронизации работы индикатора в соответствии с рабочей индикационной программой или при выполнении тестов встроенного контроля. Модуль МВ содержит в перепрограммируемом ПЗУ рабочую индикационную программу взаимодействия индикатора с комплексом БРЭО и программу тестов встроенного контроля.
Модули МД предназначены для приема, преобразования и выдачи по межмодульному параллельному интерфейсу информации, поступающей по последовательным входным/выходным каналам связи. Модули МД необходимы для организации приёма и передачи сигналов в виде последовательного кода и разовых команд по ГОСТ 18977-79. Как правило, число каналов ввода/вывода достаточно велико и для их “наращивания” используются однотипные универсальные модули, адресное пространство которых на шине обмена разделено ключами битовыми сигналами, участвующими в формировании их адресного пространства.
Модули мультиплексного обмена МО предназначены для организации интерфейсов по ГОСТ 26765.52-87 и обеспечивают реализацию функций Контроллера мультиплексного канала и Оконечного устройства канала, а также приема и выдачи разовых команд (РК) по ГОСТ 18977-79.
Модуль графический МГ предназначен для приема (в том числе цифровых сигналов интерфейса метеолокатора по ARINC 708, аналоговых RGB-сигналов ГОСТ 7845-92), преобразования и выдачи (в том числе на бортовую систему видеорегистрации аналоговых RGB-сигналов ГОСТ 7845-92) на экран графического изображения, вид, объем и параметры которого определяются протоколами взаимодействия системы и рабочим программным обеспечением, размещенным в модуле МВ.
Модуль вторичных напряжений питания МН предназначен для преобразования первичного бортового напряжения питания +27В с качеством по ГОСТ 19705-89 во вторичные напряжения питания, номенклатура которых определяется применяемыми модулями и особенностью их схем питания и начального пуска.
Модуль управления МУ представляет собой кнопочное табло, размещенное, как правило, по периметру конструктива индикатора, осуществляющее преобразование механического нажатия кнопок в электрические сигналы.
Устройство коммутации УК осуществляет функции коммутации электрических сигналов и организации межмодульного параллельного интерфейса. Межмодульный интерфейс, как уже уточнялось, необходим для организации информационного обмена между модулями МВ, МД, МО, МГ.
Экран представляет собой современное средство отображения информации и в индикаторе МФЦИ выполнен в виде плоской жидкокристаллической панели.
240
Организация интерфейсного и внутриблочного взаимодействия в устройствах индикации на жидкокристаллических панелях
В основу построения изделий бортовой индикации заложены принципы модульности и магистральности. Составляющие модули являются функционально-законченными устройствами, что позволяет реализовать информационный обмен между ними через коммутационное устройство по единой магистрали межмодульного параллельного интерфейса.
Обмен информацией МФЦИ с внешними потребителями и комплексом БРЭО производится через интерфейсные каналы устройства ввода-вывода, где цифровая информация в виде последовательных цифровых кодов, аналоговых сигналов и битовая информация в виде отдельных разовых сигналов и команд поступает на специализированные входные/выходные цепи аппаратуры комплекса БРЭО.
Индикационное бортовое оборудование МФЦИ представляет собой совокупность аппаратно - программных средств, обеспечивающих комплексный обмен информацией.
В состав аппаратной части интерфейса аппаратуры МФЦИ входят:
-линии связи, кабели, фидеры;
-входные и выходные каскады оконечных модулей, включая элементы, формирующие необходимые временные протоколы взаимодействия и диаграммы;
-усилители, шинные формирователи и буферные элементы, обеспечивающие требуемую нагрузочную способность.
Программная часть интерфейса МФЦИ представляет собой набор рабочих индикационных программ и тестового программного обеспечения, в соответствии с которыми происходит желаемый обмен информацией.
В качестве межмодульного внутриблочного интерфейса, как правило, используется интерфейс магистральный параллельный (МПИ) по ГОСТ 26765.51-86 с мультиплексированной во времени 16-ти разрядной шиной адрес/данные и с расширенным до 18 разрядов адресом.
МФЦИ как программно-управляемое изделие.
Программно-управляемыми средствами являются изделия, содержащие программируемые микросхемы памяти. Возможности функционального применения и назначения программно-управляемых изделий определяются занесенным в них ПО. Программно-управляемые средства бортового радиоэлектронного оборудования подразделяются на:
- целевые, предназначенные для выполнения заданных в техническом задании показателей качества;
- инструментальные, предназначенные для автоматизации процесса разработки, отладки, сопровождения и испытаний программно-управляемых средств и их ПО в процессе жизненного цикла продукции;
В качестве инструментальных программно-управляемых средств могут использоваться: стенды отладки и испытаний комплексов (систем), контрольнотехнологическая аппаратура, контрольно-технологические установки, рабочие места программистов. На рис. 3 показано взаимное вхождение (иерархию) терминов программноуправляемых средств.
241
Изделие
(программно-управляемое средство)
|
Целевое |
|
Инструментальное |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль |
|
Блок |
|
Комплекс |
|
Персональная ЭВМ |
|
|
БРЭО |
|
|||
|
|
|
|
|
|
|
Рис. 3. Взаимное вхождение терминов программно-управляемых средств.
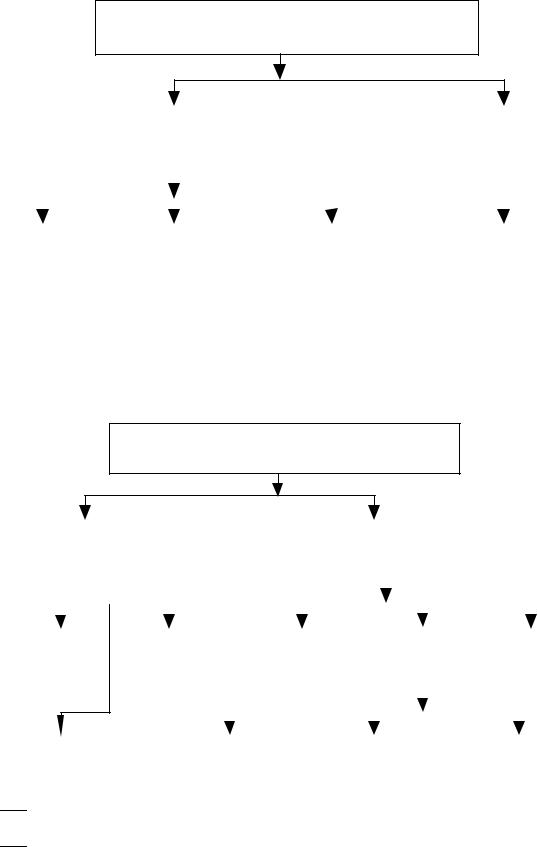
Состав программного обеспечения МФЦИ представлен на рис.4.
Состав ПО
блока 1, 2, 3, ...
Общее ПО |
|
|
Целевое ПО |
|||||
блока 1, 2, 3, ... |
|
|
блока 1, 2, 3, ... |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Технологи- |
|
Функцио- |
|
Операцион- |
|
|
ПО |
|
|
|
|
ческое ПО |
|
нальное ПО |
|
ная система |
|
|
контроля |
|
Драйверы |
||
целевое |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Технологи- |
|
Тест-программа |
|
Тест-программа |
|
Программы |
ческое ПО |
|
встроенного контроля |
|
начального включения |
|
обеспечения |
инструмент. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|

 - ПО МФЦИ, рекомендуемое к сохранению для одних типов вычислителей
- ПО МФЦИ, рекомендуемое к сохранению для одних типов вычислителей
Рис. 4. Состав программного обеспечения блоков МФЦИ.
Требования к программному обеспечению.
242
Требования к целевому программному обеспечению. Программные комплексы
(компоненты) целевого ПО должны быть построены по модульному принципу с выделением логических функций отдельных модулей в виде алгоритмов частных задач. С целью идентификации параметров ПО на всех этапах жизненного цикла программно-управляемых изделий при разработке и документировании целевого ПО (программных комплексов и компонентов, входящих в его состав) требуется сохранять следующие условия:
-идентификацию загружаемых в изделие программ по контрольной сумме;
-идентификацию загружаемых в изделие программ по обозначению;
-идентификацию загружаемых в изделие программ по изменениям. Состав, назначение и требования к целевому ПО приведены в табл.1.
Состав, назначение и требования к целевому ПО МФЦИ
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 1 |
Вид ПО |
Назначение |
|
|
|
Требования |
|
|
|||||
программные |
Реализация |
|
|
заданных |
Должны |
удовлетворять |
требованиям по |
|||||
компоненты |
алгоритмов |
|
в |
блоке |
в |
быстродействию, |
объемам |
|
памяти, |
|||
функционально |
соответствии с их целевым |
точности вычисления, составу решаемых |
||||||||||
го ПО |
назначением |
|
|
|
задач, надежности, модифицируемости |
|||||||
|
|
|
|
|
|
Должны обеспечивать: |
|
|
|
|||
|
Организация |
|
|
|
- возможность |
|
использования |
частных |
||||
программные |
вычислительного |
процесса |
программных |
алгоритмов в |
|
различных |
||||||
в |
|
программно- |
режимах; |
|
|
|
|
|
|
|||
компоненты |
управляемом |
изделии при |
- возможность |
|
подключения |
любого |
||||||
операционной |
|
|||||||||||
его функционировании |
в |
программного алгоритма в общую схему |
||||||||||
системы |
составе |
комплекса |
/ |
вычислительного процесса при доработке |
||||||||
|
||||||||||||
|
системы |
|
|
|
|
по результатам испытаний и в процессе |
||||||
|
|
|
|
|
|
модернизации комплекса |
|
|
|
|||
программные |
Обеспечение |
аппаратной |
Должны |
обеспечиваться |
унификация |
|||||||
компоненты |
независимости |
в работе |
способа |
обращения |
к |
аппаратным |
||||||
драйверов |
программ |
|
|
|
|
ресурсам |
|
|
|
|
|
|
программные |
Обеспечение |
|
контроля |
Должны удовлетворять требованиям ТЗ по |
||||||||
компоненты |
исправности |
технического |
надежности |
|
|
|
|
|
||||
контроля |
состояния изделия |
|
|
|
|
|
|
|
|
|||
программные |
|
|
|
|
|
|
|
|
|
|
|
|
компоненты |
Обеспечение |
|
контроля |
Должны удовлетворять требованиям ТЗ по |
||||||||
тестов |
технического |
|
состояния |
|||||||||
встроенного |
блока при его эксплуатации |
надежности |
|
|
|
|
|
|||||
контроля |
|
|
|
|
|
|
|
|
|
|
|
|
программные |
|
|
|
|
|
|
|
|
|
|
|
|
компоненты |
Обеспечение |
|
контроля |
Должны удовлетворять требованиям ТЗ по |
||||||||
тестов |
технического |
|
состояния |
|||||||||
начального |
блока при его изготовлении |
надежности |
|
|
|
|
|
|||||
включения |
|
|
|
|
|
|
|
|
|
|
|
|
программные |
Обеспечение |
|
контроля |
|
|
|
|
|
|
|
||
компоненты |
технического |
|
состояния |
Должны удовлетворять требованиям ТЗ по |
||||||||
программ |
блока при его производстве |
надежности |
|
|
|
|
|
|||||
обеспечения |
на заводе-изготовителе |
|
|
|
|
|
|
|
|
|||
Состав, назначение и требования к общему ПО приведены в табл.2.
Состав, назначение и требования к общему ПО блока
Таблица 2
243