Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 111
.docx-
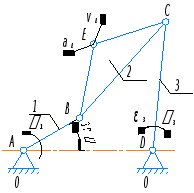
Найти абсолютные скорость и ускорение точки E и угловые скорость и ускорение звена CD (звена 3) четырехзвенного четырехшарнирного механизма. Дано: lAB=30 мм, lBC=lCD=lAD=60 мм, lBE=lCE=35 мм, φ1=30°, угловая скорость кривошипа AB (звена 1) постоянна и равна ω1=20 с-1.
Для построения плана положений механизма необходимо:
проставить точки опоры A и D;
из точки A построить отрезок AB длиной lAB под углом φ1;
из точек B и D построить отрезки BC и CD длинами lBC и lCD до совпадения (точка C) соответственно;
из точек B и C построить отрезки BE и CE длинами lBE и lCE до совпадения (точка E) соответственно.
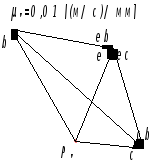
Для построения плана скоростей механизма необходимо:
проставить полюс скоростей;
отложить от полюса вектор скорости точки B (перпендикулярно AB в направлении движения кривошипа);
отложить от конца вектора скорости точки B (перпендикулярно BC) и от полюса (перпендикулярно CD) до совпадения векторы скоростей точки C относительно точки B и точки C соответственно;
отложить от конца вектора скорости точки B (перпендикулярно BE) и от конца вектора скорости точки C (перпендикулярно CE) до совпадения векторы скоростей точки E относительно точек B и C соответственно;
отложить от полюса в точку совпадения векторов скоростей точки E относительно точек B и C вектор скорости точки E.
 ;
;
 ;
;
 .
.
 .
.
 .
.
|
|
|
|
|
|
|
|
|
м/с |
0,6 |
0,827 |
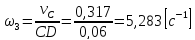
0,317 |
0,482 |
0,482 |
0,463 |







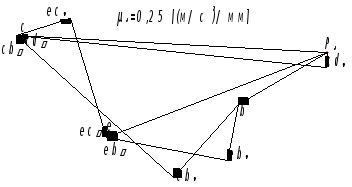
Для построения плана ускорений механизма необходимо:
проставить полюс ускорений;
отложить от полюса вектор ускорения точки B (параллельно AB в направлении от точки B к точке A);
отложить от конца вектора ускорения точки B (параллельно BC в направлении от точки C к точке B) и от полюса (параллельно CD в направлении от точки C к точке D) векторы нормальных ускорений точки C относительно точек B и D соответственно;
отложить от конца вектора нормального ускорения точки C относительно точки B (перпендикулярно BC) и от конца вектора нормального ускорения точки C относительно точки D (перпендикулярно CD) до совпадения векторы тангенциальных ускорений точки C относительно точек B и D соответственно;
отложить от полюса в точку совпадения векторов тангенциальных ускорений точки C относительно точек B и D вектор ускорения точки C;
отложить от конца вектора ускорения точки B (параллельно BE в направлении от точки E к точке B) и от конца вектора ускорения точки C (параллельно CE в направлении от точки E к точке C) векторы нормальных ускорений точки E относительно точек B и C соответственно;
отложить от конца вектора нормального ускорения точки E относительно точки B (перпендикулярно BE) и от конца вектора нормального ускорения точки E относительно точки C (перпендикулярно CE) до совпадения векторы тангенциальных ускорений точки E относительно точек B и C соответственно;
отложить от полюса в точку совпадения векторов тангенциальных ускорений точки E относительно точек B и C вектор ускорения точки E.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
12 |
0 |
12 |
11,4 |
24,7 |
1,7 |
36,4 |
36,4 |
6,6 |
14,4 |
6,6 |
14,4 |
27,6 |