Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 114
.docx-
Найти абсолютные скорость и ускорение точки D кривошипного механизма с качающимся ползуном. Дано: lAB=30 мм, lAC=60 мм, lBD=120 мм, φ1=150°, угловая скорость кривошипа AB (звена 1) постоянна и равна ω1=40 с-1.
Для построения плана положений механизма необходимо:
проставить точки опоры A и C;
из точки A построить отрезок AB длиной lAB под углом φ1;
из точки B построить отрезок BD длиной lBD через точку C.

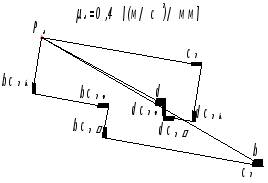
Для построения плана скоростей механизма необходимо:
проставить полюс скоростей;
отложить от полюса вектор скорости точки B (перпендикулярно AB в направлении движения кривошипа);
отложить от полюса (параллельно BD) и от конца вектора скорости точки B (перпендикулярно BD) до совпадения векторы скоростей точки C звена 2 и точки C звена 2 относительно точки B соответственно;
отложить от конца вектора скорости точки B (перпендикулярно BD) вектор скорости точки D относительно точки B (перпендикулярно BD в направлении вектора скорости точки C звена 2 относительно точки B) на расстояние пропорциональное отношению длин BD к BC2;
отложить от полюса в конец вектора скорости точки D относительно точки B вектор скорости точки D.
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
м/с |
1,2 |
1,127 |
0,412 |
1,549 |
0,59 |






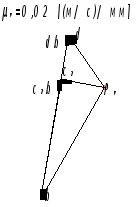
Для построения плана ускорений механизма необходимо:
проставить полюс ускорений;
отложить от полюса вектор ускорения точки B (параллельно AB в направлении от точки B к точке A);
отложить от полюса цепь из векторов кориолисова ускорения точки B относительно точки C2 (перпендикулярно BD в направлении по правилу правой руки для векторной суммы векторов) и нормального ускорения точки B относительно точки C2 (параллельно BD в направлении от точки B к точке C2);
отложить от конца вектора нормального ускорения точки B относительно точки C2 (перпендикулярно BD) в конец вектора ускорения точки B (параллельно BD) цепь из векторов тангенциального ускорения точки B относительно точки C2 и ускорения точки C2 соответственно;
отложить от полюса цепь из векторов ускорения точки C2, кориолисова ускорения точки D относительно точки C2 (перпендикулярно BD в направлении по правилу правой руки для векторной суммы векторов), нормального ускорения точки D относительно точки C2 (параллельно BD в направлении обратном направлению вектора нормального ускорения точки B относительно точки C2) на расстояние пропорциональное отношению длин DC2 к BC2 и тангенциального ускорения точки D относительно точки C2 (перпендикулярно BD в направлении обратном направлению вектора тангенциального ускорения точки B относительно точки C2) на расстояние пропорциональное отношению длин DC2 к BC2;
отложить от полюса в конец вектора тангенциального ускорения точки D относительно точки C2 вектор ускорения точки E.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
48 |
0 |
48 |
14,5 |
5,86 |
10,6 |
30,5 |
5,45 |
3,99 |
10,6 |
26,4 |