Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 117 1
.docx-
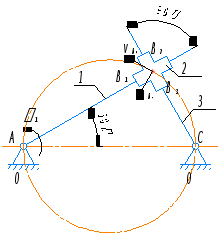
У механизма муфты Ольдгейма найти скорость и ускорение точки B2 звена 2, совмещенной с точками B1 и B3, находящимися на пересечении осей направляющих Ax и Cy. Дано: lAC=40 мм, φ1=30°, угловая скорость кривошипа Ax (звена 1) постоянна и равна ω1=10 с-1.
Для построения плана положений механизма необходимо:
проставить точки опоры A и C;
из точки A провести прямую под углом φ1;
из точки C провести прямую перпендикулярно прямой, проведённой из точки A;
из точек A и C построить отрезки через точку пересечения прямых.
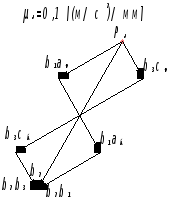
Для построения плана скоростей механизма необходимо:
проставить полюс скоростей;
отложить от полюса вектор скорости точки B звена 1 (перпендикулярно AB в направлении движения кривошипа);
отложить от конца вектора скорости точки B звена 1 (параллельно AB) и от полюса (по касательной к траектории точки B звена 2) векторы скоростей точки B звена 2 относительно точки B звена 1 и точки B звена 2 соответственно;
отложить от полюса цепь из векторов скорости точки B звена 3 (совпадает с вектором скорости точки B звена 1) и скорости точки B звена 2 относительно точки B звена 3 (совпадает с вектором скорости точки B звена 1).
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
м/с |
0,346 |
0,2 |
0,4 |
0,2 |
0,346 |






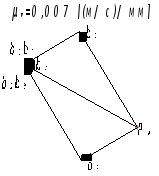
Для построения плана ускорений механизма необходимо:
проставить полюс ускорений;
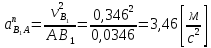
отложить от полюса цепь из векторов нормального ускорения точки B звена 1 относительно точки A (параллельно AB в направлении от точки B к точке A) и кориолисова ускорения точки B звена 1 относительно точки A (перпендикулярно AB в направлении по правилу правой руки для векторной суммы векторов) и цепь из векторов нормального ускорения точки B звена 3 относительно точки C (параллельно BC в направлении от точки B к точке C) и кориолисова ускорения точки B звена 3 относительно точки C (перпендикулярно BC в направлении по правилу правой руки для векторной суммы векторов);
отложить от концов векторов кориолисова ускорения точки B звена 1 относительно точки A (параллельно AB) и кориолисова ускорения точки B звена 3 относительно точки C (параллельно BC) векторы ускорения точки B звена 2 относительно точки B звена 1 и ускорения точки B звена 2 относительно точки B звена 3 до совпадения соответственно;
отложить от полюса в точку совпадения векторов ускорения точки B звена 2 относительно точки B звена 1 и ускорения точки B звена 2 относительно точки B звена 3 вектор ускорения точки B звена 2.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
3,46 |
0 |
4 |
2 |
0 |
6,92 |
3,46 |
2 |
8 |