Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 120
.docx-
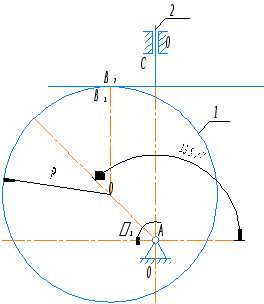
У кулачкового механизма, в котором кулачок представляет собою эксцентрично вращающийся диск, найти скорость и ускорение толкателя (звена 2). Дано: R=50 мм, lAO=30 мм, φ1=135°, угловая скорость кулачка постоянна и равна ω1=20 с-1.
Для построения плана положений механизма необходимо:
проставить точку опоры A и прямую траектории точки C;
на расстоянии AO от точки A под углом φ1 построить окружность контура кулачка радиусом R;
провести горизонтальную касательную к окружности контура кулачка;
через точку касания окружности контура кулачка и касательной к окружности контура кулачка и вдоль прямой траектории точки C провести два перпендикулярных отрезка.
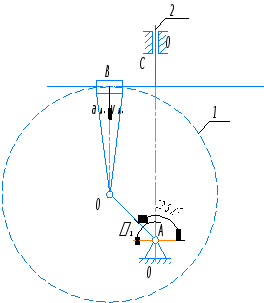
Для построения заменяющего механизма необходимо:
провести общую нормаль к профилям в точке их соприкосновения;
на нормалях найти положение центров кривизны профилей;
в центрах кривизны разместить вращательные кинематические пары пятого класса;
полученные дополнительные кинематические пары соединить жесткими звеньями.
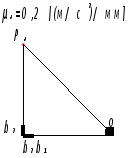
Для построения плана скоростей механизма необходимо:
проставить полюс скоростей;
отложить от полюса вектор скорости точки O (перпендикулярно AO в направлении движения кривошипа);
отложить от конца вектора скорости точки O (перпендикулярно прямой траектории точки C) и от полюса (параллельно прямой траектории точки C) векторы скоростей точки B звена 2 относительно точки B звена 1 и точки B соответственно.
 ;
;
 .
.
 .
.
|
|
|
|
|
|
м/с |
0,6 |
0,424 |
0,424 |




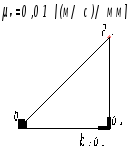
Для построения плана ускорений механизма необходимо:
проставить полюс ускорений;
отложить от полюса вектор ускорения точки O (параллельно AO в направлении от точки O к точке A);
отложить от конца вектора ускорения точки O (перпендикулярно прямой траектории точки C) и от полюса (параллельно прямой траектории точки C) векторы ускорения точки B звена 2 относительно точки B звена 1 и ускорения точки B звена 2 соответственно.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
м/с2 |
12 |
0 |
12 |
8,485 |
8,485 |