

Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 125
.docx-
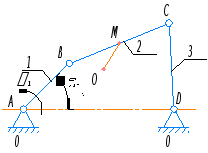
У четырёхзвенного четырёхшарнирного механизма найти центр кривизны OM и радиус кривизны ρM траектории точки M, лежащей на середине расстояния BC, если lAB=30 мм, lBC=50 мм, lCD=40 мм, lAD=70 мм, φ1=45°.
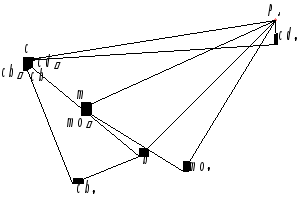
Для построения плана положений механизма необходимо:
проставить точки опоры A и D;
из точки A построить отрезок AB длиной lAB под углом φ1;
из точек B и D построить отрезки BC и CD длинами lBC и lCD до совпадения соответственно;
поставить точку M в середине отрезка BC.
Для построения плана скоростей механизма необходимо:
проставить полюс скоростей;
отложить от полюса вектор скорости точки B (перпендикулярно AB в направлении движения кривошипа);
отложить от конца вектора скорости точки B (перпендикулярно BC) и от полюса (перпендикулярно CD) векторы скоростей точки C относительно точки B и точки C соответственно;
отложить от полюса в середину вектора скорости точки C относительно точки B вектор скорости точки M.
 ;
;
 ;
;
 ;
;
 .
.
|
|
|
|
|
|
|
м/с |
30 |
23,68 |
12,37 |
19,66 |





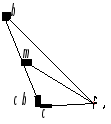
Для построения плана ускорений механизма необходимо:
проставить полюс ускорений;
отложить от полюса (параллельно AB в направлении от точки B к точке A) вектор ускорения точки B;
отложить от конца вектора ускорения точки B (параллельно BC в направлении от точки C к точке B) и от полюса (параллельно CD в направлении от точки C к точке D) векторы нормального ускорения точки C относительно точки B и нормального ускорения точки C относительно точки D;
отложить от конца вектора нормального ускорения точки C относительно точки B (перпендикулярно BC) и от конца вектора нормального ускорения точки C относительно точки D (перпендикулярно CD) векторы тангенциального ускорения точки C относительно точки B и тангенциального ускорения точки C относительно точки D до совпадения соответственно;
отложить от полюса в точку совпадения векторов тангенциального ускорения точки C относительно точки B и тангенциального ускорения точки C относительно точки D вектор ускорения точки C;
отложить от конца вектора ускорения точки B в конец вектора тангенциального ускорения точки C относительно точки B вектор ускорения точки C относительно точки B;
отложить от полюса в середину вектора ускорения точки C относительно точки B вектор ускорения точки M;
отложить от полюса в конец вектора ускорения точки M цепь из векторов нормального ускорения точки M относительно точки O (перпендикулярно вектору скорости точки M) и тангенциального ускорения точки M относительно точки O (параллельно вектору скорости точки M) до совпадения соответственно.
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
30 |
0 |
30 |
11,22 |
3,83 |
20,69 |
39,67 |
39,85 |
33,25 |
27,48 |
18,72 |












Зная нормальное ускорение точки и скорость M определить радиус кривизны траектории точки M.
 .
.