

Лекции по интеллектуальным системам / Лекция 5
.docЛекция №5
Конвейерная структура с максимальной пропускной способностью.
Во всех методах ранее рассмотренных для разделения различных элементов данных используются запомин-ие элементы.
Если убрать фиксаторы, то можно достичь более высокой производительности. Эта структура была предложена при рассмотрении трубопроводов.
Но существует реальная система, где наблюдается следующее состояние.

Это связанно с трением жидкости о стенки трубы, межмолекулярное взаимодействие и т. д.
Аналогично и в электр. схемах.
Если бы:
-
Все логические схемы имели одинаковые задержки;
-
Входы
 уровня были бы
связанны с выходами вентилей предыдущего
уровня;
уровня были бы
связанны с выходами вентилей предыдущего
уровня; -
Все пути через уровень проходили бы в точности через 1 вентиль,
Тогда фиксаторы не нужны и получаем следующую ситуацию:
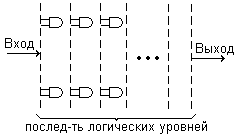
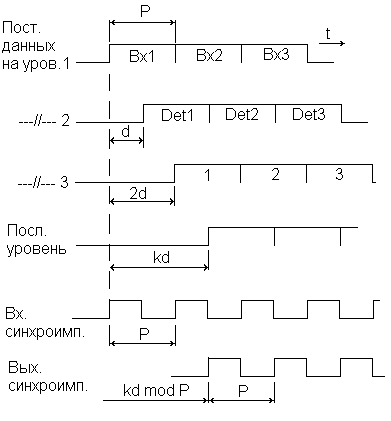
P – период, в течение которого данные подаются на первый уровень.
d – задержка на вентиль.
Выборка с k-го уровня производится также с периодом P, но со сдвигом по фазе на kd mod P.
Ограничение.
Наименьшее значение P ограничивается минимальной шириной импульса, в течение которого вентиль ещё может выдавать правильный выходной сигнал (с зад. на d секунд).
Как правило, ширина импульса меньше чем d. Т. е. можно увеличить производительность примерно в 10 раз по сравнению со схемами использующие триггера.
** Эти структуры называются конвейеры с максимальной скоростью.
В реальных же системах, задержки у одних вентилей могут быть выше или ниже среднего значения. Т. е. на выходе будем иметь некоторые данные раньше, некоторые позже среднего значения. Т. е. эти данные на следующий уровень попадут не мгновенно, а в течение некоторого периода ???.
Различия в задержках на следующем уровне ещё больше увеличат ???
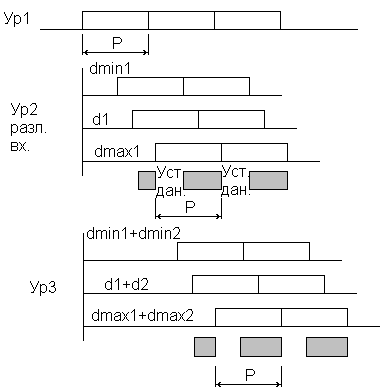
||||||||||| - на различные входы первого уровня поступают данные в различные моменты ??? – неустойчивые данные.
Возрастающая неопределенность уменьшает тот период ???, в течение которого могут быть получены правильные и устойчивые данные.
Пусть P(k) – период ???, в течение которого могут быть получены устойчивые данные на k – уровне
![]()
Т. е. в конце концов,
можно получить P(k)
![]() 0, т.е. конвейер уже
бесполезен.
0, т.е. конвейер уже
бесполезен.
Т.е. необходимо убрать дробление на уровне < k и ввести дополнительные схемы, которые будут принимать данные и выдавать их на следующий уровень в течение Р секунд.
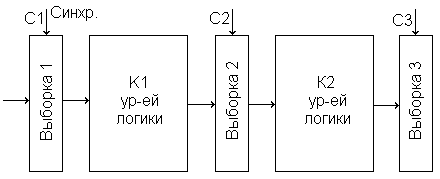

Далее 3 выборка.
Такую синхронизацию могут выполнять и фиксаторы, хотя можно спроектировать логические схемы и без памяти. Т.е. взять данные и удерживать их на выходе.
Могут быть введены дополнительные уровни, новые схемы для синхронизации.
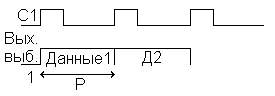
Необходимо некоторое время min W, в течение которого данные устойчивы на входе в выборку.
![]()
Перенос синхроимпульсов преодолевается также как и в структуре с фиксаторами.
Если распределение синхронизации не имеет переносов, то можно оценить период Р
![]()
Т.е. здесь входят разности задержек, а не сами задержки.
Некоторые схемы могут иметь столь малое W, что оно примерно равно d.
Т .е.
Р d.
.е.
Р d.
А для схем с
фиксаторами
![]() .
.
Причины слабой реализации:
-
При проектировании схемы следует учитывать огромную совокупность факторов, влияющих на задержки.
-
Система распределения синхронизации. Т.к. необходимо бороться не только с переносом синхроимпульсов, но и обеспечить
 схему синхроимпульсов с определенной
фазой.
схему синхроимпульсов с определенной
фазой. -
Трудность отладки.
Если конвейеры с фиксаторами можно отлаживать в пошаговом режиме, т.к. данные хранятся в фиксаторах, То здесь данные теряются.
Отладка в режиме с полной скоростью.