

Раздел 6. Доплеровские системы навигации
План раздела:
6.1. Структура доплеровской системы навигации;
6.2. Доплеровские измерители путевой скорости и угла сноса;
6.3. Классификация ДИСС по виду излучаемого сигнала;
6.4. Доплеровский измеритель ДИСС-013;
6.5. Бортовой навигационный комплекс самолета ИЛ-62;
6.6. Вертолетный доплеровский измеритель ДИВ-1.
6.1. Структура доплеровской системы навигации
Доплеровские системы навигации (ДСН) относятся к классу автономных, т.е. таких систем, в которых необходимая навигационная информация получается с помощью только бортового оборудования воздушного судна (ВС), без применения каких-либо наземных средств.
При использовании
ДСН определение места ВС осуществляется
методом счисления пути. Сущность этого
метода рассмотрим для простейшего
случая счисления пути в плоской
прямоугольной системе координат
![]() ,
связанной с Землей (рис. 6.1), ось
,
связанной с Землей (рис. 6.1), ось![]() которой совпадает по направлению с
географическим меридианом.
которой совпадает по направлению с
географическим меридианом.
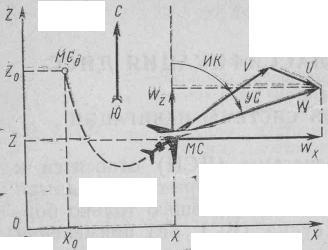
Рис. 6.1. Счисление пути в плоской прямоугольной системе координат
На рис. 6.1
![]() – вектор воздушной скорости;
– вектор воздушной скорости;![]() – горизонтальная составляющая скорости
ветра;
– горизонтальная составляющая скорости
ветра;![]() – вектор путевой скорости, т.е. скорости
перемещения проекции центра масс ВС
относительно поверхности Земли;
– вектор путевой скорости, т.е. скорости
перемещения проекции центра масс ВС
относительно поверхности Земли;![]() – угол сноса – угол между
– угол сноса – угол между![]() и
и![]() ;
;![]() – истинный курс самолета;
– истинный курс самолета;![]() – координаты места самолета (МС) в момент
начала отсчета текущего времени
– координаты места самолета (МС) в момент
начала отсчета текущего времени![]() ;
;![]() – текущие координаты МС.
– текущие координаты МС.
Для навигации
методом счисления пути координаты
![]() должны быть известны и непрерывно (в
интервале времени
должны быть известны и непрерывно (в
интервале времени![]() )
должны измеряться составляющие
)
должны измеряться составляющие![]() и
и![]() путевой скорости
путевой скорости![]() .
Если эти условия удовлетворяются, то
текущие координаты
.
Если эти условия удовлетворяются, то
текущие координаты![]() определяются путем интегрирования
составляющих
определяются путем интегрирования
составляющих![]() и
и![]() во времени:
во времени:
![]() ,
,
![]() . (6.1)
. (6.1)
Собственно
доплеровский измеритель позволяет
измерить абсолютное (скалярное) значение
путевой скорости
![]() и угла сноса (
и угла сноса (![]() ),
т.е. направление вектора
),
т.е. направление вектора![]() относительно продольной оси ВС.
относительно продольной оси ВС.
Вполне очевидно,
что эти данные не определяют положение
![]() в системе координат
в системе координат![]() и его составляющих
и его составляющих![]() и
и![]() .
.
На основании рис. 6.1
![]() ,
,
![]() . (6.2)
. (6.2)
это означает, что
для определения
![]() и
и![]() необходимо измерять истинный курс (
необходимо измерять истинный курс (![]() ).
).
Для счисления пути
с помощью ДИСС должны измеряться
![]() и
и![]() и с помощью курсовой системы (КС) –
и с помощью курсовой системы (КС) –![]() ,
а это значит, что доплеровская система
навигации должна включать три функционально
самостоятельные части (рис. 6.2):
,
а это значит, что доплеровская система
навигации должна включать три функционально
самостоятельные части (рис. 6.2):
– собственно ДИСС,
измеряющий
![]() и
и![]() ;
;
– курсовую систему,
измеряющую
![]() (или ортодромический курс
(или ортодромический курс![]() );
);
– навигационный
вычислитель (![]() ),
реализующий алгоритмы (6.1) и (6.2).
),
реализующий алгоритмы (6.1) и (6.2).

Рис. 6.2. Структурная схема доплеровской системы навигации
Так как счисление
пути в ДНС ведутся по формулам (6.1), то
погрешности при определении
![]() и
и![]() интегрируются во времени. Медленно
меняющиеся погрешности, сохраняющие
свой знак за время
интегрируются во времени. Медленно
меняющиеся погрешности, сохраняющие
свой знак за время![]() неизменным, возрастают при этом прямо
пропорционально
неизменным, возрастают при этом прямо
пропорционально![]() .
Поэтому автономные системы комлексируются
с позиционными радионавигационными
системами (угломерно-дальномерными,
разностно-дальномерными), с помощью
которых корректируются результаты
измерений автономных систем. Сущность
коррекции заключается в периодической
замене счисленных координат координатами,
определенными с помощью позиционной
радионавигационной системы (РНС).
.
Поэтому автономные системы комлексируются
с позиционными радионавигационными
системами (угломерно-дальномерными,
разностно-дальномерными), с помощью
которых корректируются результаты
измерений автономных систем. Сущность
коррекции заключается в периодической
замене счисленных координат координатами,
определенными с помощью позиционной
радионавигационной системы (РНС).