


УДК 001.8(082)
ББК 1 Н 34
Периодичность – 12 раз в год
Свидетельство ПИ № ФС 77-84349
ISSN 2226-5694
Cостав ред. коллегии и сведения об учредителе приведены на сайте https://na-journal.ru
Н34 НАУЧНЫЙ АСПЕКТ № 9 2023. – Самара: Изд-во ООО «Аспект», 2023 . – Т7 . – 132 с.
Журнал «Научный аспект» является научным изданием и отражает результаты научной деятельности авторов по различным дисциплинам в области гуманитарных, естественных и технических наук.
УДК 001.8(082) ББК 1
Почтовый адрес: 420100 г. Казань а/я 9 Официальный сайт: https://na-journal.ru Электронная почта: public@na-journal.ru Подписано к печати 18.10.2023
Бумага ксероксная. Печать оперативная. Заказ № |
. |
Формат 60×84 /16. Объем 7,92 п.л. Тираж 100 экз. |
|
Отпечатано в типографии «Куранты» г. Казань, Сибирский тракт, 34к14, оф. 317, тел. +7 (843) 216-12-71
Содержание
ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ |
|
Смирнов М. Н., Смирнова М. А. |
|
Разработка системы управления в условиях возмущений |
773 |
Смирнова М. А., Смирнов М. Н. |
|
Исследование динамических особенностей беспилотного аппарата |
782 |
Бабушкина П. А. |
|
Роль кибер-криминалистики в образовании |
793 |
Бабушкина П. А. |
|
Программные продукты и способы их продвижения |
798 |
Бурсов А. И., Сафонова Д. М. |
|
Использование нейросетевых технологий в диагностике |
|
диабетической ретинопатии на изображениях глазного дна |
804 |
Акатьев Я. А., Бабынина Д. Д., Яковчук А. В. |
|
Особенности проектирования мобильных приложений в контексте |
|
применения различных мобильных операционных систем |
809 |
Ярыгин О. В. |
|
Ретроспективный анализ эволюции методов верификации |
|
пользователей в социальных сетях с использованием алгоритмов |
|
машинного обучения |
818 |
Сапогов А. А. |
|
Основные проблемы концепции агрегирования показателей |
821 |
Евстраткин К. С., Султанова А. Р. |
|
Сравнение фреймворков для разработки десктопных приложений |
826 |
Гордеев Д. В. |
|
Метод сингулярного разложения в задачах прогнозирования |
|
пользовательского интереса при рекомендации товаров и услуг |
832 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
Куренной А. А. |
|
|
О возможности применения технологии Lidar на беспилотных |
|
|
летательных аппаратах для определения передвижения объектов |
|
|
наблюдения в реальном времени |
839 |
|
Ткаченко В. А. |
|
|
Разработка метода определения оптимальной точки генерации |
|
|
и структуры сети децентрализованных районов, включая минигрид |
849 |
|
ТЕХНОЛОГИИ ПРОИЗВОДСТВА |
|
|
Мохова О. П., Коробков А. И. |
|
|
Восстановление металлических деталей машин с помощью |
|
|
гальванического железнения |
|
862 |
РАДИОТЕХНИКА И АКУСТИКА |
|
|
Филиппов А. А., Урамбеков Э. Б., Сазанов И. Н. |
|
|
Принцип отражения одновременного и разностного объекта |
|
|
в эффективной БРЛС |
|
869 |
Филиппов А. А., Урамбеков Э. Б., Сазанов И. Н. |
|
Использование существующих методов расчета поправок на |
|
распространение спутникового радионавигационного сигнала |
|
в слоях атмосферы, для решения прикладных задач в моделировании |
|
разработки многопозиционной радиолокационной станции на |
|
воздушном носителе с внешним источником подсвета |
877 |
Кучмин Н. А. |
|
Особенности распространения связи для спутниковых систем, |
|
модели помеховой обстановки |
890 |
772 |
na-journal.ru |

ИНФОРМАЦИОННЫЕ ТЕХНОЛОГИИ
УДК 517.977.5
Разработка системы управления в условиях возмущений
Смирнов Михаил Николаевич
кандидат физико-математических наук, доцент Санкт-Петербургского государственного университета
Смирнова Мария Александровна
кандидат физико-математических наук, старший преподаватель Санкт-Петербургского государственного университета
Аннотация: В данной статье рассматриваются особенности конструирования автоматических систем контроля в условиях внешних воздействий. В ходе исследования рассматривается вопрос контролирования движения морского подвижного объекта по определенному курсу при наличии неизвестных заранее внешних возмущений. Специальное внимание уделяется достижению нужных характеристик замкнутой системы, а именно, достижению необходимого запаса устойчивости. Помимо этого, рассматривается вопрос стабилизации морского объекта найденным управлением с учетом действия возмущений сторонних сил и дополнительного запаса устойчивости.
Abstract: This paper examines the design features of automatic control systems under external influences. The research considers the issue of controlling the movement of a marine mobile object along a certain course in the presence of external disturbances unknown in advance. Special attention is paid to achieving the desired characteristics of the closed-loop system, namely, to achieve the necessary stability margin. In addition, the question of stabilization of a marine object by the control found, taking into account the action of perturbations of external forces and additional stability margin, is considered.
Ключевые слова: управление, моделирование, беспилотный, объект управления, морской.
Keywords: control, modeling, autonomous, control object, marine.
Системы автоматического управления движением широко распространены в современном мире. Они встречаются в автомобилях, беспилотных
г. Самара |
773 |

Научный аспект |
№9 2023 |
том 7 |
|
|
|
аппаратах различного назначения, самолетах, производственных роботах на заводах и кораблях. Благодаря различным датчикам подобные системы позволяют более точно и эффективно управлять различными подвижными объектами. Поэтому такие системы необходимо постоянно развивать и улучшать. В литературе [1–8] встречаются различные варианты построения управлений для разных ситуаций, однако все они до сих пор не охвачены.
В данной статье рассматриваются особенности разработки автоматических систем управления в условиях внешних возмущений. В частности, исследуется задача контролирования движения морского объекта по заданному курсу при наличии неизвестных внешних воздействий. Отдельное внимание уделено достижению требуемых характеристик замкнутой системы, а точнее говоря, достижению необходимой степени устойчивости. Кроме того, изучается проблема стабилизации надводного морского объекта сформированным управлением принимая во внимание действия сторонних сил и неосновные требования к характеристике стабильности общей системы.
Математическая модель морского объекта представляется дифференциальными уравнениями:
m |
|
|
dVx |
|
+mh |
dωz |
= G |
, |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
x |
|
dt |
|
|
|
|
|
dt |
|
|
x |
|
|
|
|
|
|
|
|
m |
|
|
dVy |
|
+λ |
|
|
dω |
z |
= G |
|
, |
|
|
|
|
|||||
|
|
dt |
|
26 |
|
dt |
|
|
|
|
|
|
|||||||||
|
|
y |
|
|
|
|
|
|
|
y |
|
|
|
|
dωy |
|
|||||
mz |
|
dV |
|
+(λ34 −mh) |
dω |
x +λ35 |
= Gz , |
||||||||||||||
|
|
z |
|
|
|
|
|
||||||||||||||
|
dt |
|
dt |
dt |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Jx |
dωx |
|
+(λ34 −mh)dVx |
=Tx , |
|
|
|||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
||
J |
|
|
dωy |
|
+λ |
|
|
dV |
|
=T , |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
35 |
|
z |
|
|
|
|
|
|
|||||||
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
||||||||
|
y |
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|||||
|
|
|
dω |
|
|
|
|
|
|
dVy |
|
|
|
dV |
|
|
|||||
J |
|
|
|
|
z |
|
+λ |
26 |
|
|
|
+mh |
|
|
|
x |
=T . |
|
|||
|
z |
|
dt |
|
|
|
|
dt |
|
|
|
|
|
|
dt |
z |
|
||||
Примером возьмем на рассмотрение морской подвижный объект с максимальной скоростью V =15м/ си водоизмещением 4500 м3.
Выделим из математической модели только компоненты, относящие-
774 |
na-journal.ru |

Информационные технологии
Выделим из математической модели только компоненты, относящиеся к процессу движения по курсу. Получим
V |
= |
|
Jxx (1+k44 )Gz −mk34Tx |
, |
||
mJxx (1+k33 )(1+k44 )−m2 k342 |
||||||
z |
|
|
||||
ωy = |
|
Ty |
. |
|
||
|
J yy (1+k55 ) |
|
||||
|
|
|
|
|
||
Обратим внимание, что в процессе исследования движения морских судов дифферент ψ считается маленьким. В этом случае из уравнений
кинематики остается только одно
φ = ωy .
Здесь силы и моменты Gz ,Tx ,Ty выражаются следующим образом
Gz = ZH + ZR + Fz ,
Tx = −mgh0 + zk mVxωy + M xH + M xR + M x ,
Ty = M yH + M yR + M y .
Здесь ZH , M xH , M yH — проекции силы и момента гидродинамики, которые влияют на объект управления, ZR , M xR , M yR — проекции силы и момента, появляющиеся при изменении угла вертикальных рулей,
Fz , M x , M y — проекции векторов силы и момента от воздействия сторонних сил в системе координат Oxyz .
Чтобы вычислить данные проекции, следует воспользоваться следующими формулами
Z |
H |
= 4,89V 2β+ |
9, 644V 2 |
Ω |
1−Ω2 |
+23, 7V 2β |
|
β |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
L |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
= −11,39V 2β−22, 474V 2 |
|
|
−55, 23V 2β |
|
|
|
, |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
M |
xH |
Ω |
1−Ω2 |
|
|
β |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
||
M |
yH |
= −322, 61V 2β−223, 6V 2 |
Ω+69,1V |
2Ω |
|
β |
|
−160,8V 2 |
Ω |
|
Ω |
|
|
, |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
L |
|
|
|
|
L |
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
||||||
где V = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy L |
|
|
|
|
|
|
|
|
|
V |
|
|
||||||||||||||
|
Vx2 +Vy2 ,VL |
|
|
V 2 +ω2y L2 , Ω = |
|
|
|
|
|
|
|
|
|
z |
||||||||||||||||||||||||||||||||
|
= |
|
|
|
|
|
|
|
|
,β = −arctg |
|
. |
||||||||||||||||||||||||||||||||||
|
|
VL |
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Vx |
|
|||||||||||
Z |
R |
|
=1, 236V 2 β−0,567V |
2 |
ω− |
1, 236V 2 δ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
LR |
|
|
|
|
|
LR |
|
|
|
|
|
LR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
M |
xR |
= −3,91V 2 β+1, 79V |
2 |
ω+ |
3,91V 2 δ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
LR |
|
|
|
|
|
LR |
|
|
|
|
LR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M |
yR |
=156,93V 2 |
|
β−29,9V |
2 |
ω−156,93V |
2 |
δ, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
LR |
|
|
|
|
|
LR |
|
|
|
|
|
LR |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ωy L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
V |
|
|
= V |
2 |
2 |
|
2 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
+ L ω , ω = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
775 |
||||||||||
г. Самара |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Научный аспект |
|
|
|
|
№9 2023 |
том 7 |
||||||
M |
yR |
=156,93V 2 |
β−29,9V 2 |
ω−156,93V 2 δ, |
|
|||||||
|
|
|
|
|
LR |
|
|
LR |
LR |
|
||
|
|
|
|
|
|
|
|
|
|
ωy L |
|
|
|
|
|
|
|
2 |
2 |
|
2 |
, ω = |
. |
|
|
V |
|
= V |
|
+ L |
ω |
y |
|
|
||||
|
|
|
|
|||||||||
LR |
|
|
|
|
R |
|
|
VLR |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
В указанных формулах δ |
— угол поворота рулей. |
|
||||||||||
Для исследования динамики объекта необходимо добавить уравнение привода
δ = u ,
где u — искомое управление. Поскольку на угол поворота рулей накладываются технические ограничения, то их тоже необходимо принимать во внимание:
max δ = 30°, max u = 3°/ c .
Для формирования управления нам требуемся линеаризовать математическую модель в окрестности нуля по переменным φ, ωy , Vz . Тогда при
фиксированной скорости Vx =V мы получим математическую модель курсового движения в линейном приближении
V |
= −a VV +a V ω |
y |
−bV 2 |
δ+δ F , |
||
z |
11 |
z |
12 |
1 |
1 z |
|
ωy = a21VVz −a22V ωy −b2V 2δ+δ2 M y ,
φφ == ωωyy..
Для рассматриваемого судна мы имеем конкретные значения постоДля рассматриваемого судна мы имеем конкретные значения посто-
янных коэффициентов:
a |
= 8,3763 10−3 , |
a |
21 |
= 2,5823 10−4 , |
||
11 |
|
|
|
|
|
|
a12 |
=1, 6228, |
a22 = 0, 052989, |
||||
b =1, 7038 10−3 , |
b |
|
= 2, 4459 |
10−4 , |
||
1 |
|
2 |
|
|
|
|
δ |
=1,3255 10−3 , |
δ |
2 |
=1,5586 |
10−6. |
|
1 |
|
|
|
|
|
|
Как правило, в процессе изучения движения морских судов в качестве одного из параметров вектора состояния принимают дрейф β вме-
сто проекции скорости Vz . В линейном приближении β и Vz имеют сле-
дующую связь β = −Vz |
= −Vz , т.е. V = −Vβ . |
|
Vx |
V |
z |
|
||
После использования этого уравнения мы получим линеаризованную математическую модель динамики морского подвижного объекта в горизонтальной плоскости
−Vβ = a V 2β+a V ω |
y |
−bV 2 |
δ+δ F , |
|
11 |
12 |
1 |
1 z |
|
776 |
na-journal.ru |

Информационные технологии
−Vβ = a V |
2β+a V ω |
y |
−bV 2δ+δ F , |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
11 |
|
|
12 |
|
|
|
1 |
|
|
1 |
|
z |
|
|
|
|
|
|
|
|
||
ω |
y |
= −a V |
2β−a V ω |
y |
−b V 2 |
δ+ |
δ |
M |
y |
, |
|
|
|
||||||||||||||
|
|
|
|
21 |
|
|
22 |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|||||
φ = ωy. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
β = −a Vβ−a |
|
ω |
|
+bV δ− δ1 |
F |
, |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
11 |
|
|
12 |
|
y |
|
1 |
|
V |
z |
|
|
|
|
|
|
|
|
|
|||
ω |
y |
= −a V 2β−a V ω |
y |
−b V 2 |
δ+δ |
M |
y |
, |
|
|
|
||||||||||||||||
|
|
|
|
|
21 |
|
|
22 |
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
||||||
|
|
|
φ = ωy. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Если примем в качестве вектора состояния |
x = (β ωy φ)′ и в каче- |
||||||||||||||||||||||||||
стве вектора сторонних сил |
w = (Fz |
|
M y |
0) |
, то можно ввести новые |
||||||||||||||||||||||
обозначения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
a |
|
|
= −a V , |
a |
= −a , b |
= bV , |
δ |
= − δ1 , |
|
|
|||||||||||||||||
11 |
|
|
11 |
|
12 |
|
|
|
12 |
|
1 |
|
1 |
|
1 |
|
|
V |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
a |
|
|
= −a V |
2 |
, a |
|
= −a V , |
|
= −b V |
2 |
|
|
|
|
= δ |
, |
|
||||||||||
21 |
|
22 |
b |
|
, δ |
2 |
|
||||||||||||||||||||
|
|
|
21 |
|
|
|
|
|
|
22 |
|
2 |
|
2 |
|
|
|
|
2 |
|
|
||||||
и получить линейную систему дифференциальных уравнений, описывающих движение рассматриваемого судна в горизонтальной плоскости в матричной форме
x = Ax +Bδ+Dw
с матрицами |
|
|
|
|
|
|
|
|
||||
с матрицами |
0 |
|
b1 |
|
|
δ1 |
|
|||||
|
a |
a |
|
|||||||||
|
a11 |
a12 |
0 |
|
b1 |
|
|
δ1 |
|
|||
|
|
11 |
12 |
|
|
|
|
|
|
|
|
|
A = |
a |
21 |
a |
0 |
|
, B = b |
, |
D = |
δ |
. |
||
|
|
|
22 |
|
|
|
2 |
|
|
2 |
|
|
|
|
0 |
1 0 |
|
0 |
0 |
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Теперь нам необходимо принять во внимание, что воздействия сторонних сил w(t) не определены полностью, однако подчиняются огра-
ничению

 w(t)
w(t)
 ∞ ≤1 для всякого 0 ≤ t < ∞.
∞ ≤1 для всякого 0 ≤ t < ∞.
Рассмотрим вместе уравнения движения и уравнение рулей, вводя
x
расширенный вектор состояния x = δ . Тогда расширенная система ли-
нейных дифференциальных уравнений примет вид x = Ax +Bu +Dw,
г. Самара |
777 |
Научный аспект |
|
|
|
|
|
|
|
|
№9 2023 |
|
том 7 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
= Ax +Bu +Dw, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где новые матрицы имею вид |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
δ |
|
|
|
|
|
||
|
|
A |
B |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
= |
|
|
|
, |
|
|
δ2 |
|
, |
w = |
(Fz |
M y 0 0). |
A = |
0 |
, B |
|
|
|
D = |
|
|
|
||||||||
|
|
0 |
|
|
0 |
|
|
0 |
|
|
|
|
|||||
|
|
1x3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
1 |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Сформируем управление в виде статической обратной связи по состоянию
u = Kx x + Kδδ = Kx = k1β+k2ω+k3φ+k4δ.
Из-за того, что в определении возмущающих сил w имеется неопределенность, рассмотрим вопрос о наилучшей динамике нашей системы с учетом этой неопределенности. Тогда коэффициенты k1 , k2 , k3 , k4 подле-
жат определению в процессе рассмотрения вопроса о минимизации размера Jδ инвариантного эллипсоида с достижением необходимых харак-
теристик нашей системы
Jδ = Jδ (K) → K min .
Ωsk Ωk
Предположим, что мы измеряем весь вектор x , т.е. y = Cx, C = E4×4 .
Тогда уравнения замкнутой системы принимают вид
β = a11β+a12ωy +b1δ+δ1Fz , ωy = a21β+a22ωy +b2δ+δ2 M y ,
φ = ω,
δ = k1β+k2ω+k3φ+k4δ,
или в матричной форме
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
|
|
|
|
|
|
|
|
|
|
A |
|
B |
|
|
|
|
|
1 |
|
|
|
|
x |
+D |
w, |
A |
|
|
|
|
, |
D |
|
|
|
δ2 |
|
. |
||
x = A |
3 |
= |
(k1 |
|
k3 ) |
|
3 |
= D = |
|
|
|
||||||||
|
3 |
|
3 |
|
|
|
k2 |
|
|
|
|
0 |
|
||||||
|
|
|
|
|
|
|
|
k4 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ищем искомый вектор коэффициентов регулятора, который наилучшим образом (в смысле поставленной задачи) компенсирует ограничен-
778 |
na-journal.ru |
Информационные технологии
ные внешние возмущающие воздействия и одновременно обеспечивает желаемую степень устойчивости замкнутой системы:
k1 = 3.0981, k2 = 57.7472, k3 = 23.9121, k4 = −1.2793.
При этом имеем следующие компоненты вектора , при которых достигается нужная степень устойчивости:
γ11 = −1, γ12 = 2, γ21 =1, γ22 = −0.05.
При использовании синтезированного регулятора собственные числа матрицы замкнутой системы принимают значения
λ1 = −0.1027 , λ2 = −0.5465 + 0.0147 i , λ3 = −0.5465 − 0.0147 i , λ4 = −0.5368,
т.е. желаемая степень устойчивости достигнута.
Заметим, что учет требования к характеристике устойчивости является весьма важным при решении практических задач. Проведем сравнение полученного здесь результата с найденным управлением и компенсирующим ограниченные возмущения без выполнения дополнительных модальных требований. Для этого регулятора получаем коэффициенты:
k1 = 0.1738, k2 =10.6013, k3 =1.0242, k4 = −0.0378.
Тогда собственные значения матрицы рассматриваемой системы равны
λ1 = −0.3138, λ2 = −0.0599 + 0.1886i , λ3 = −0.0599 − 0.1886i , λ4 = −0.0574,
т.е. степень устойчивости при использовании второго регулятора оценивается константой 0.06, что значительно хуже, чем характеристика устойчивости системы с первым регулятором, и плохо показывается себя в динамике объекта и увеличивает длительность процесса поворота.
Теперь сравним поведение динамической системы в различных ситуациях.
Пусть ограниченное внешнее воздействие представляет собой последовательность случайных ограниченных «всплесков» продолжительностью 40 секунд.
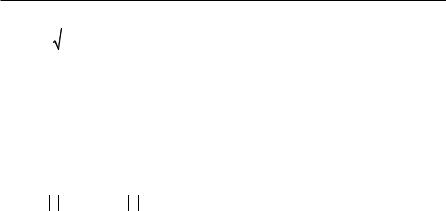
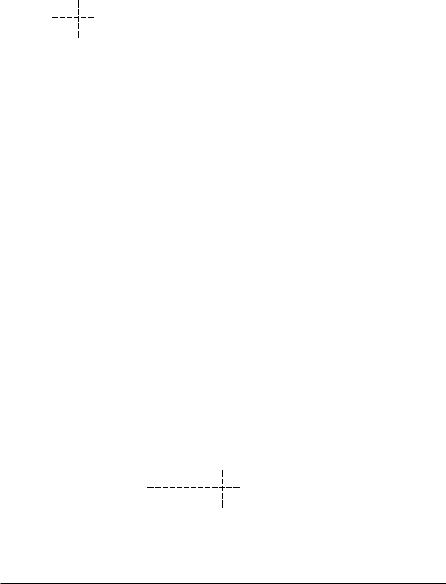
На рис. 1 и рис. 2 сплошная линия представляет динамику судна (изменение курса и отклонение рулей соответственно) при использовании первого управления, пунктирная — представляет собой те же процессы
г. Самара |
779 |

Научный аспект |
|
№9 2023 |
том 7 |
при применении второго регулятора, построенного без учета требования |
|||
к степени устойчивости. |
|
|
|
Изменение курса, град |
|
|
|
0.5 |
|
|
|
0 |
|
|
|
-0.5 |
|
|
|
0 |
50 |
100 |
150 |
|
|
Время, с |
|
|
Рисунок 1. Изменение курса судна |
|
|
Отклонение рулей, град
10 
5
0 

























-5 |
|
|
|
|
-10 |
0 |
50 |
100 |
150 |
Время, с
Рисунок 2. Отклонение рулей
Как видно из рис. 1, при использовании первого управления отклонение судна от курса в 5 раз меньше, чем для второго регулятора. При этом время стабилизации курса судна после окончания действия ограниченного возмущения в первом случае составляет менее 10 секунд, а во втором — 50 секунд.
780 |
na-journal.ru |

Информационные технологии
Таким образом, в статье представлена и рассмотрена проблема контролирования движения судна в горизонтальной плоскости при наличии неопределенных внешних возмущений. Отдельное место уделяется достижению необходимых характеристик системы, в частности, достижению необходимой характеристики устойчивости. Компьютерное моделирование проведено в системе MATLAB-Simulink.
Список литературы
1.Veremei E.I., Korchanov V. M. Multiobjective stabilization of a certain class of dynamic systems // Automation and Remote Control, № 49, 1989. pp. 1210–1219.
2.Веремей Е. И. Линейные системы с обратной связью. — СПб.: Изд–во «Лань», 2013–448 с.
3.Веремей Е. И., Корчанов В. М. Многоцелевая стабилизация динамических систем одного класса // АН СССР. Автоматика и телемеханика. 1988.— № 9. — С. 126–137.
4.Веремей Е. И. Синтез законов многоцелевого управления движением морских объектов // Гироскопия и навигация. 2009.— № 4. — С. 3–14.
5.Smirnova M.A., Smirnov M. N. Multipurpose control laws in trajectory tracking problem.// International Journal of Applied Engineering Research.— 2017–11(22), — pp.11104–11109.
6.Vitrant E., Canudas–De–Vit C., Georges D., Alamir M. Remote stabilization via time–varying communication network delays // IEEE Conference in Control Applications, Taiwan,— 2004.
7.Smirnov M.N., Smirnova M. A. Control synthesis for marine vessels in case of limited disturbances // Telkomnika (Telecommunication Computing Electronics and Control),— 2018,— 16(2), — pp. 648–653.
8.Smirnov M.N., Smirnova M. A. Questions of stabilization and control of unmanned aerial vehicles // Comptes Rendus de L’Academie Bulgare des Sciences,— 2018,— 71(1), — pp. 87–91.
г. Самара |
781 |