

Добавил:
vasya228
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Лекции_физика_механика_Тронева / Лекц.1в Ур. кинематики пост и вращ. движ..pptx
ЛЕКЦИЯ 1В МЕХАНИКА
УРАВНЕНИЯ КИНЕМАТИКИ ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
УСКОРЕНИЕ И ЕГО СОСТАВЛЯЮЩИЕ
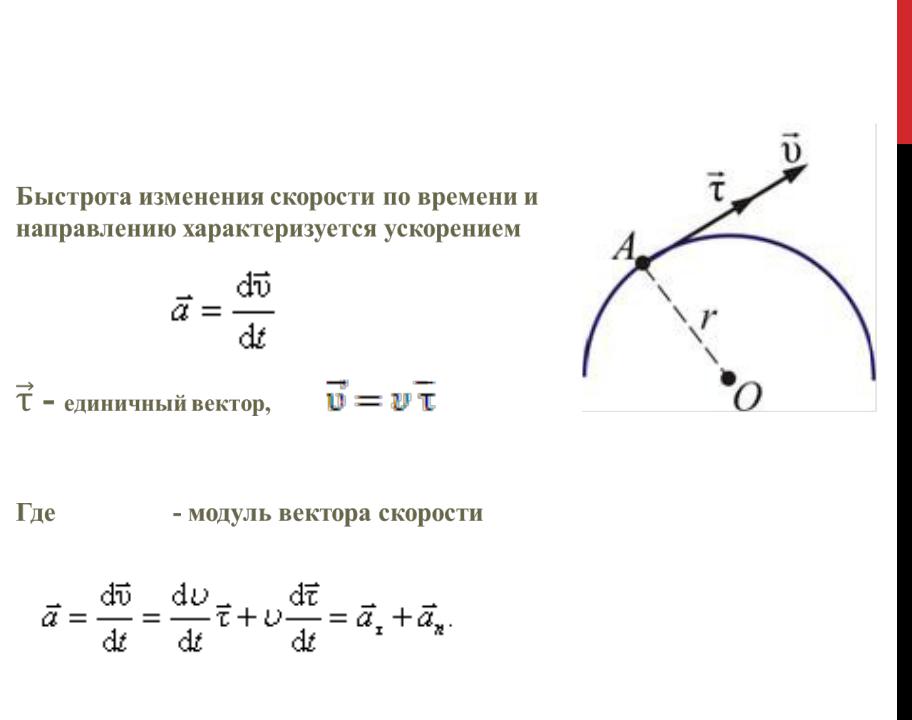
Быстрота изменения скорости по времени и направлению характеризуется ускорением
- единичный вектор,
Где  - модуль вектора скорости
- модуль вектора скорости
ТАНГЕНЦИАЛЬНОЕ УСКОРЕНИЕ
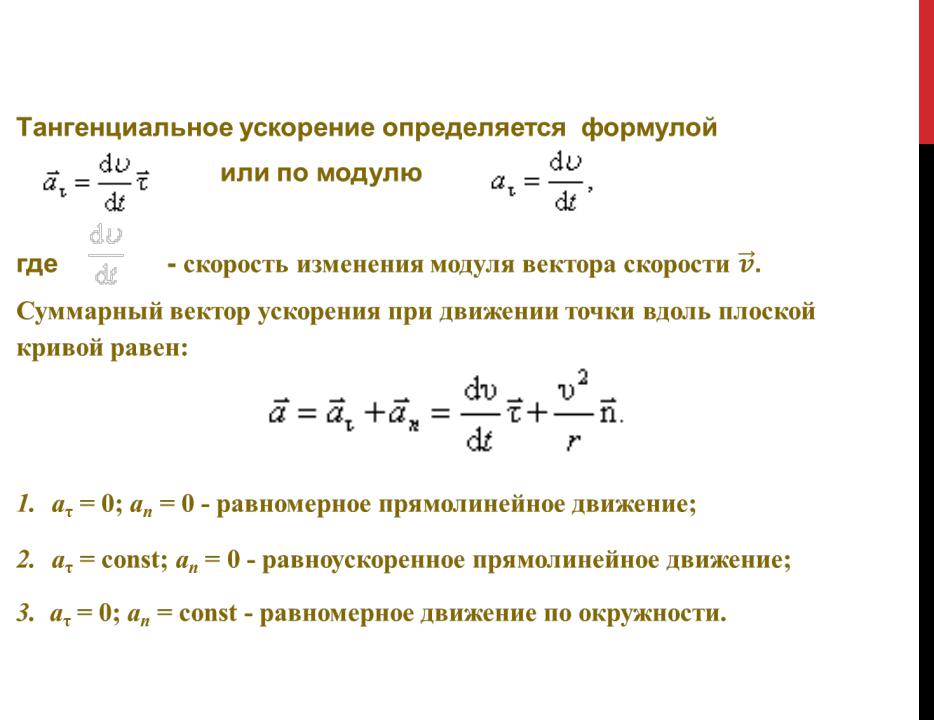
Тангенциальное ускорение определяется формулой
|
или по модулю |
где |
- скорость изменения модуля вектора скорости . |
Суммарный вектор ускорения при движении точки вдоль плоской кривой равен:
1.aτ = 0; an = 0 - равномерное прямолинейное движение;
2.aτ = const; an = 0 - равноускоренное прямолинейное движение;
3.aτ = 0; an = const - равномерное движение по окружности.

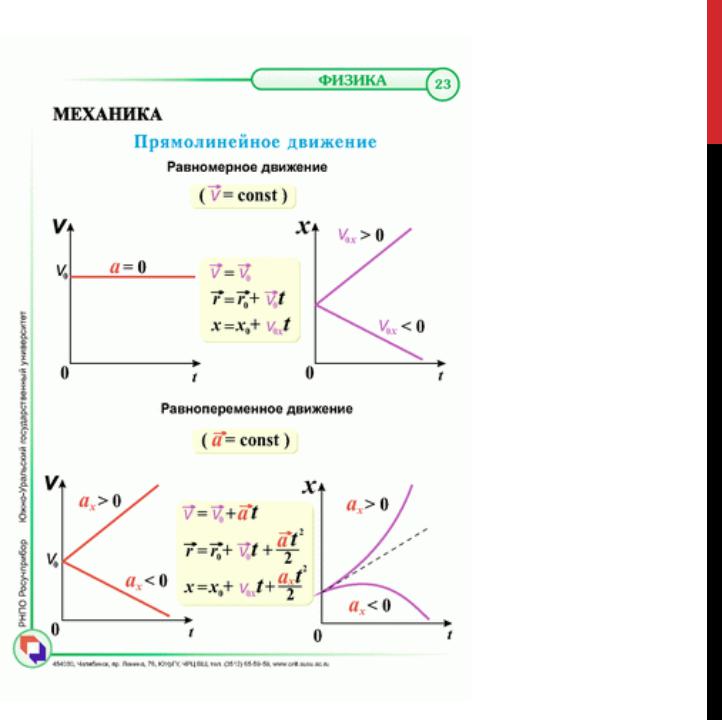
УРАВНЕНИЯ КИНЕМАТИКИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ МАТЕРИАЛЬНОЙ ТОЧКИ
Равномерное движение
Движение с постоянным ускорением
Если = ± a t (а = const), то:

УРАВНЕНИЯ КИНЕМАТИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
равномерное вращение ε = 0; ω = const; φ = φ0 ± ω t,
равнопеременное вращение