5 Построение тахограммы и нагрузочной диаграммы
Для построения нагрузочной диаграммы третьего привода манипулятора воспользуемся модулем SimMechanics библиотеки Simscape программы MatLab. Для этого используем элементы «Body», «Revolute», «Weld», «Ground», и «Machine Environment», благодаря которым мы сможем смоделировать технологический процесс манипулятора, а также «Joint Actuator» и «Joint Sensor», благодаря которым мы сможем задавать динамику процесса и измерять необходимые параметры.
Получившаяся модель представлена на рисунке 10.
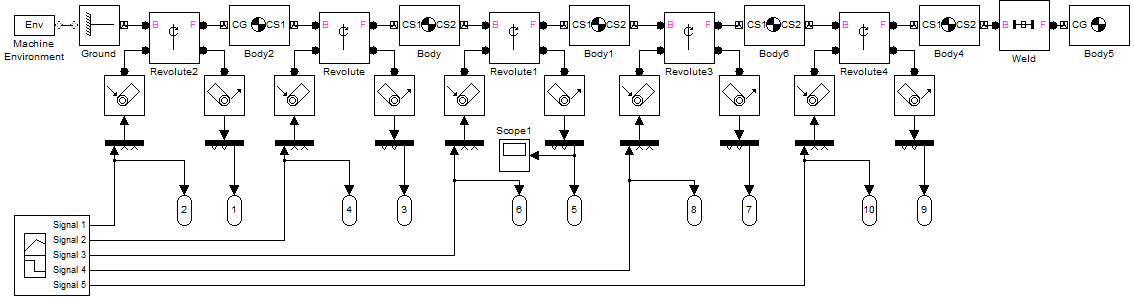
Рисунок 10 – Модель манипулятора на базе элементов SimMechanics MatLab
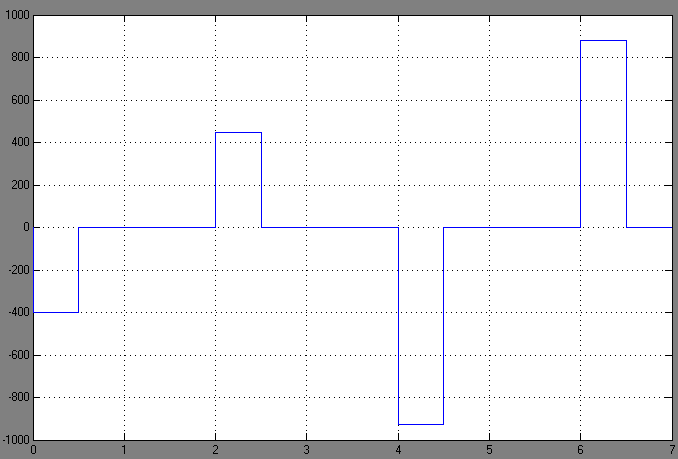
С помощью этой модели, мы можем получить статическую и динамическую нагрузку на привод. На рисунке 11 изображена полученная нагрузочная диаграмма.
M,
Нм
t,
с

Рисунок 11 – Нагрузочная диаграмма третьего привода манипулятора
Производная заданной функции поворота привода даст нам тахограмму, которая представлена на рисунке 12). В MatLab производную сигнала можно получить с помощью элемента «Derivative».
,
1/с
t,
с
 Рисунок
12 – Тахограмма идеализированного
технологического процесса третьего
привода манипулятора
Рисунок
12 – Тахограмма идеализированного
технологического процесса третьего
привода манипулятора
6 Требования, предъявляемые к мехатронной системе
Мехатронная система манипулятора должна иметь очень высокую точность положения схвата.
Перерегулирование по положению САР не допускается.
В следящем режиме скорость не должна иметь ошибки по скорости, т.е. статическая ошибка по скорости не допускается.
Ток якоря должен ограничиваться допустимыми для двигателя значениями.
Задание положения схвата или любых других частей манипулятора не должно выходить за физически непреодолимые препятствия, например, через пол.
7 Разработка системы управления мехатронной системы
Так как в манипуляторе имеется 6 сервоприводов, подключенных последовательно, то и система управления (СУ) будет состоять из 6 звеньев. Все звенья будут аналогичны, поэтому расчет будет проводиться для одного звена.
Структурная схема системы управления представлена на рисунке 13.

Рисунок 13 – Структурная схема системы управления двигателем постоянного тока
Для начала рассчитаем основные параметры объекта регулирования. Эквивалентное сопротивление якорной цепи рассчитывается по формуле:

Эквивалентная индуктивность якорной цепи равна:

Эквивалентная постоянная времени определяется по формуле:
Электромеханическая постоянная времени электропривода рассчитывается по формуле:

7.1 Построение контура регулирования тока
Структурная схема контура регулирования якорного тока представлена на рисунке 14.
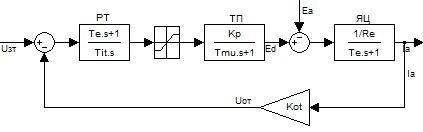
Рисунок 14 – Структурная схема контура регулирования якорного тока
Передаточная функция регулятора тока выглядит следующим образом:
Коэффициент обратной связи по току якоря определяется:

Постоянная
времени интегрирования
 определяется:
определяется:

7.2 Построение контура регулирования скорости
Структурная схема контура регулирования скорости электродвигателя представлена на рисунке 15.

Рисунок 15 – структурная схема контура регулирования скоростью электродвигателя
После настройки внутреннего контура регулирования якорного тока выполняется настройка внешнего контура регулирования скорости вращения электродвигателя.
Для регулирования скорости вращения электродвигателя необходимо сформировать на его валу необходимый момент. Эту задачу выполняет регулятор скорости (РС). Выходное напряжение РС поступает на вход подчиненного ему регулятора тока, формируя необходимую величину тока, а следовательно, при неизменной величине магнитного потока и пропорционального току момента.
Коэффициент обратной связи по скорости электродвигателя определяется:

Передаточная функция контура регулирования скорости выглядит следующим образом:
Коэффициент передачи регулятора скорости определяется: