

Если один из шаров до взаимодействия покоится, то после удара он будет двигаться со скоростью другого шара, который после взаимодействия остановится.
Билет №5. Уравнение движения материальной точки. Третий закон Ньютона. Силы трения. Сила упругости.
Уравнение движения материальной точки
Материальная точка – это тело, размеры которого пренебрежимо малы по сравнению с масштабами движения.
Кинематическое описание движения – это задание положения тела относительно данной системы отсчета в любой момент времени или, другими словами, задание закона движения тела.
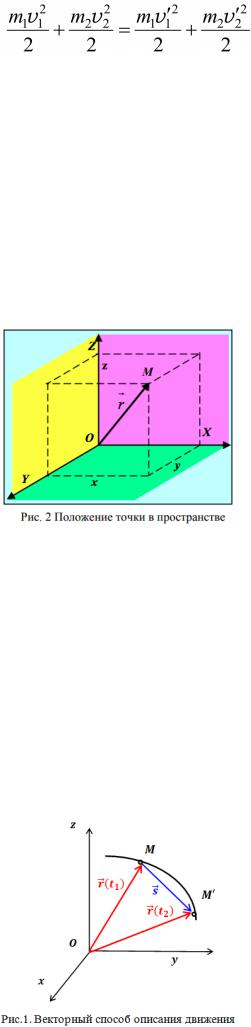
Положение точки М в этой системе характеризуется координатами (скалярное задание положения) x, y, z или радиус-вектором положения материальной точки (рис.2):
r=x i+ y j+z k
где i , j, k – орты осей.
Вместо координат x, y, z можно задать длину радиус вектора r и два угла ϕ и θ, которые составляет радиус-вектор с осями y и z.
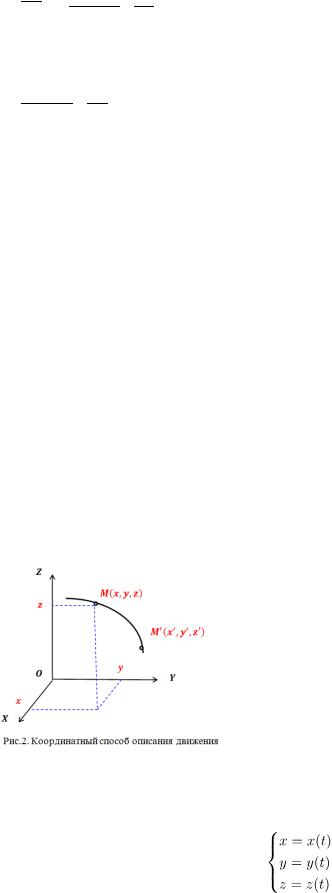
Векторный способ описания движения
Векторный способ описания движения – это описание изменения радиус-вектора материальной точки в пространстве с течением времени.
Рассмотрим движение точки M в некоторой системе отсчета Oxyz (рис.1). Зададим радиус-вектор точки r — вектор, соединяющий начало координат с этой точкой.
При движении точки M вектор r будет с течением времени изменяться, т.е. будет каким-то образом зависеть от времени. Эта зависимость r =r(t) представляет собой закон движения в векторном виде.
В процессе движения конец радиус-вектора будет описывать траекторию, а его изменение – перемещение S точки.
=r r1 +r2 |
|
|
|||
Δt=t1 +t2 |
|
|
|||
|
r |
|
lim |
r |
|
ν= |
ν= Δt → 0 |
= d r |
|||
Δt |
|||||
|
|
|
Δt |
dt |
|
d =r ν dt |
|
|
|||
=ν ν2−ν1 |
Δt=t2−t1 |
||||
|
lim |
ν |
d ν |
d ν =a dt |
|
a= |
Δt → 0 |
||||
Δt |
= dt |
|
|||
При равноускоренном движении (a = Const):
2 2
∫ d x=∫ ν dt x2−x1=ν(t2 −t1 )
11
2 2
∫ d ν =∫ adt ν2−ν1=a(t2−t1)
11
ν2=ν1 +a Δt
x2 |
t2 |
a Δt2 |
|
x=∫ dx =∫ (ν1 +at )dt=ν1 Δt + |
+x1 |
||
x1 |
t1 |
2 |
|
|
|
||
Координатный способ описания движения
Координатный способ описания движения – описание изменения во времени координат точки в выбранной системе отсчета.
При координатном способе положение точки в пространстве задается тремя координатами (рис.2). Выбор системы координат зависит от конкретной задачи. Можно работать в декартовой (прямоугольной) системе, иногда удобнее бывает сферическая или цилиндрическая системы координат.
В декартовой системе координат положение точки определяется тройкой чисел (x , y , z) — ее декартовыми координатами.
Чтобы задать закон движения точки, необходимо знать значения ее координат в каждый момент времени. Закон движения в координатном виде в общем случае представляет собой систему трех уравнений: