

22. Импульсное управление линейным эп
Импульсное управление электроприводом предполагает периодическое подключение линейного электродвигателя к источнику питания и отключению от него, при этом в тот период когда двигатель подключен к источнику питания происходит передача энергии от источника к электроприводу, которая главным образом передается через индуктор производительному механизму а часть ее запасается в виде кинетической и электромагнитной энергии.
В период же отключения ЭП продолжает работать за счет накопленной энергии
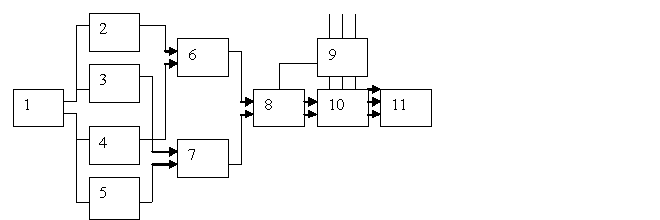
Изображаем блок схему импульсного управления..
В этой схема ЛАД(11) с помощью тиристорного коммутатора(10) периодически подключается к источнику тока(9), напряжение которого не изменено. Период коммутации ЛАД задается генератором импульсов(1) а ассемитричность(длительность велюченного и выкл. Состояния двигателя) определяется длительностью вкл. ивыкл. Состояния ключей (6 и 7). Регулирование соотношения длительности включенного и выключенного состоянию ключей (6 и 7) осуществляется задержкой импульсов генератора (1) через цепи задержек (2 и 5). Инверторы (3 и 4), служат для согласования режимов работы генераторов импульсов (1) и ключей (6 и 7) а коммутатор (8) для выбора режима работы.
Регулирование скорости лин. ЭП м-т выполн-ся разл. способами. При ШИР остается неизменным период коммутации T=const, значит f=1/T=const.
В случае ЧИР остается неизменным длительность подключения к сети ключа t1, а изменяется частота коммутации f=var, значит T=var.
Возможен также и комбинированный способ импульсного регулирования ШЧИР, когда одновременно изменяются и длительность включенного состояния двигателя и частота коммутации.
23. Система автоматического регулирования угловой скорости с жесткой обратной связью по напряжению.

Система уравнений в установившемся режиме:
![]()


Где
![]()

 Еп-
эдс дв
Еп-
эдс дв
 -
коэф
усиления ос по напряжению
-
коэф
усиления ос по напряжению
Уравнение МХ в замкнутой системе ДПТ НВ :


Первый член – точка идеального Х.Х. и определяется только задающим напряжением.
Если КУ и КП=const то МХ прямая.
Анализ последнего уравнения показывает что при КС стремится к бесконечности жесткость МХ ,в рассмотренной системе не превосходит жесткость естественной характеристики ДПТ 1 .
На графике показаны: естественная характеристика дпт 1, к которой стремится характеристика двигателя при КС стремящейся к бесконечности; характеристика 2 в разомкнутой системе регулирования с учетом общего сопротивления якорной цепи двигателя и преобразователя; характеристики 3 и 3’ в замкнутой системе регулирования.
В данной системе посредством ОС компенсируется падение напряжения на внутреннем сопротивлении преобразователя и колебания напряжения сети, т.е. стабилизируется выходное напряжение преобразователя . Поэтому предельной жесткостью хар-ки является жесткость естественной характеристики двигателя.
24.Система автоматического регулирования угловой скорости с жесткой положительной ос.

Рис.28-1 . В случае жесткой положительной обратной связи по току якоря ДПТ, компенсация падения угловой скорости, возникающей в результате увеличения нагрузки, достигается автоматическим увеличением ЭДС преобразователя.
Выходное напряжение будет равно
![]()
Где
![]()

Уравнение механической характеристики
![]()
Первый член точка идеального ХХ характеризуется задающим напряжением.
Рис 28-2

Если разделить 2-ой член правой части на его первый член уравнения, при номинальном моменте тогда получим уравнение характеризующее статизм (устойчивость)характеристики.
![]()
Анализ данного уравнения показывает , что статизм в замкнутой системе может быть равен 0 , при условии , что
![]()

(которой соответствует 3-я характеристика);
При
 характеристика может быть восходящей(хар-ка
1);
характеристика может быть восходящей(хар-ка
1);
При
 характеристика нисходящая(хар-ка 2).
характеристика нисходящая(хар-ка 2).
Если коэффициенты усиления с ростом нагрузки падают или ослабевают, то характеристики принимают нелинейный характер(пунктирные 1’ и 3’).