

6.3. Построение сетей фототриангуляции и создание планов.
Технологическая схема аналитической пространственной фототриангуляции включает три основных процесса:
подготовительные работы;
измерение снимков на стереокомпараторе;
построение сети пространственной фототриангуляции на ЭВМ.
В подготовительные работы входят:
- сбор и изучение исходных материалов;
- составление рабочего проекта пространственной фототриангуляции;
- выполнение рабочих поверок и исследований СК1818 (см. раздел 6.1.).
При составлении рабочего проекта необходимо учитывать, что существует необходимость выбора на каждой стереопаре аэрофотоснимков не менее чем 6 примерно стандартно расположенных точек. Эти точки служат для построения моделей по стереопарам аэрофотоснимков [2].
6.3.1Методика построения сетей.
Далее нужно запроектировать очередность и порядок обработки сети. В первую очередь будут обрабатываться секции, в которых существуют излишние опорные точки, а потом – все остальные (приложения 1 и 2).
Все фотограмметрические точки обозначают наколом на одном комплекте контактных отпечатков. Переколку точек на смежные маршруты тщательно контролируют.
Все точки пространственной сети выбирают и накалывают обязательно при стереоскопическом рассматривании на интерпретоскопе.В данной работе— интерпретоскоп Народного предприятия «Карл Цейсс Йена».
6.3.2 Аналитическая маршрутная фототриангуляция по способу независимых моделей.
Этот способ аналитической маршрутной фототриангуляции основан на построении по стереопарам независимых моделей и соединении их в общую модель.
Каждая модель строится независимо от других моделей. Для этого измеряют координаты точек стереопары, включенных в фотограмметрическую сеть, определяют элементы взаимного ориентирования снимков и вычисляют координаты точек модели. Созданные таким образом одиночные модели соединяют в общую модель с помощью связующих точек. По этим точкам находят элементы ориентирования последующей модели относительно предыдущей. Зная эти элементы, вычисляют координаты точек последующей модели в системе координат, принятой при построении предыдущей модели. Следовательно, общая модель имеет единую систему координат, принятую при построении первой модели. Общая модель ориентируется по опорным точкам относительно геодезической системы координат. При этом вводятся поправки за деформацию модели.
Таким образом этот способ маршрутной фототриангуляции не требует определения элементов внешнего ориентирования снимков. Для построения каждой одиночной модели используются элементы взаимного ориентирования пары снимков и система координат, ось X которой совмещена с базисом фотографирования, а плоскость XZ — с главной базисной плоскостью левого снимка.
Вначале определяем элементы взаимного ориентирования ά1’, χ1’, ά2’, ω2’, χ2’.
Фотограмметрические
координаты точек модели вычисляют по
трансформированным
координатам
![]() ,
,![]() ,
,![]() ,
,![]() точек стереопары[7].
точек стереопары[7].
![]() (6.3.1)
(6.3.1)
![]()
![]()
![]()
При этом длина базиса фотографирования выбирается произвольно для каждой стереопары, т. е. каждая модель строится в произвольном масштабе.
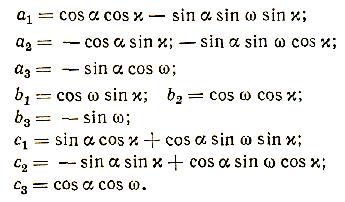
Трансформированные координаты точек стереопары вычисляют по формулам (6.3.2)[7].
(6.3.2)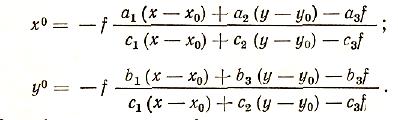
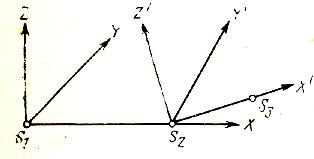
Рис 6.3.1
Соединения моделей.
В
(6.3.3.)
Пусть X, Y, Z — координаты связующей точки в системе S1XYZ первой модели, а X', Y', Z' –координаты соответствующей точки второй модели в системе S2X'Y'Z' (рис. 6.3.1).[7]
Элементами ориентирования: координаты точки S2 в системе S1XYZ , т. е. величины Х0, Y0, и Z0; углы ξ, η, θ, определяющие направления осей координат системы S2X'Y'Z' относительно S1XYZ, и масштабный коэффициент t.
Пусть известны приближенные значения этих элементов. Для плановых снимков можно считать, что начальные приближения углов ξ, η, θ равны нулю. Приближенные значения Х0=В, Y0=Z0=О, а приближенное значение коэффициента t найдем как отношение соответственных отрезков D и D' для какой-либо связующей точки.
(6.3.4)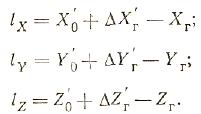
Очевидно, что при решении этой задачи вместо геодезических координат ХГ, YГ и ZГ нужно использовать координаты связующих точек в системе первой модели — S1XYZ.
К
(6.3.5)
Построенную таким образом общую модель ориентируют относительно геодезической системы координат. Положение опорных и других точек местности определяется обычно в системе координат Гаусса. Начало и направления координатных осей этой системы устанавливаются отдельно для каждой зоны.
В общем случае фототриануляционная сеть может иметь значительную длину и располагаться в нескольких зонах. Однако для внешнего ориентирования сети необходимо определить положение опорных точек в единой системе координат. В качестве такой системы используют систему прямоугольных координат с началом в центре эллипсоида. Эти координаты называются геоцентрическими. Достоинство системы геоцентрических координат состоит в том, что она едина для всего эллипсоида.
Переход от координат Гаусса к геоцентрическим координатам опорных точек выполняется по формулам, известным из курса высшей геодезии.
При внешнем ориентировании модели необходимо исключить деформации ее, возникшие при построении сети. Поправки за деформацию вводятся обычно с помощью полиномов второго или третьего порядка, для применения которых необходимо, чтобы фотограмметрическая и геоцентрическая системы были приблизительно параллельны. В общем случае это невозможно. Поэтому используем промежуточную систему координат XпYпZп, которую установим так, чтобы координаты опорных точек в этой системе отличались возможно меньше от фотограмметрических. Затем найдем элементы ориентирования модели относительно промежуточной системы координат. Зная эти элементы, вычислим координаты определяемых точек в промежуточной системе. Используя полиномы, внесем поправки в эти координаты за деформацию модели. От исправленных координат точек сети в промежуточной системе перейдем к геоцентрическим, а затем к координатам Гаусса [1].