

Учебное пособие 800258
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Воронежский государственный технический университет
А.М. Литвиненко А.В. Машаров
СПЕЦИАЛИЗИРОВАННЫЕ ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА (ДИНАМИЧЕСКИЙ РАСЧЕТ РОБОТОТЕХНИЧЕСКИХ СИСТЕМ)
Утверждено Редакционно-издательским советом университета в качестве учебного пособия
Воронеж 2004
УДК 658.52.011.56.012.3.005:658.012.011.56
Литвиненко А.М., Машаров А.В. Специализированные исполнительные устройства (Динамический расчет робототехнических систем): Учеб. пособие. Воронеж: Воронеж. гос. техн. ун-т, 2004. 120 с.
В учебном пособии рассмотрены вопросы динамического расчета робототехнических систем.
Издание соответствует требованиям Государственного образовательного стандарта высшего профессионального образования по направлению 220200 «Автоматизация и управление », специальности 220201 «Управление и информатика в технических системах», дисциплине «Системы» управления роботами.
Учебное пособие подготовлено на магнитном носителе в текстовом редакторе MS WORD97.0 и содержится в файлах ―ВВЕДЕНИЕ.doc‖, ―ГЛАВА 1.doc‖, ―ГЛАВА 2.doc‖, ―ГЛАВА
3.doc‖.
Табл. 1. Ил. 50. Библиогр.: 37 назв.
Научный редактор д-р техн. наук, проф. В.Л.Бурковский
Рецензенты: НИИ Механотроника-Альфа (ген.директор канд.техн.наук, доц Э.Г. Кузнецов)
д-р техн. наук, проф Ю. С. Сербулов (ВГТА)
©Литвиненко А.М., Машаров А.В.,
2004
©Оформление. Воронежский государственный технический университет, 2004
ВВЕДЕНИЕ
К методам динамического управления обычно относят такие, при которых формирование управляющих сигналов осуществляется с учетом уравнений динамики манипулятора. При этом за счет усложнения управления удается преодолеть негативное влияние нелинейностей и перекрестных связей, повысить качество процесса управления, обеспечить его устойчивость независимо от конкретной траектории. Такое управление приобретает особенно важное значение для манипуляторов, снабженных высоко моментными без редукторными электродвигателями, поскольку в этом случае неприемлемы методы расчета, основанные на разделении каналов управления.
При анализе движения манипулятора, кинематическая цепь которого содержит замкнутые контуры, или при выполнении с помощью манипулятора различных механических операций, таких, как сборка, обработка поверхности. Для анализа динамики манипуляционных механизмов в подобных случаях более эффективными оказываются модели движения в форме уравнений Лагранжа, а также применение принципа наименьшего принуждения Гаусса. Другой причиной, способствовавшей широкому применению этих методов, является поиск подходов, позволяющих получить численные алгоритмы моделирования движения сложных механизмов, наиболее эффективные с точки зрения затрат машинного времени.
ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ НЕЛИНЕЙНОСТИ ВИДА ЛЮФТ В БЛОКЕ ПЕРВОГО ПРИВОДА ПОВОРОТА РОБОТАМАНИПУЛЯТОРА.
1. ЦЕЛЬ РАБОТЫ:
Составить структурную схему двигателя постоянного тока с независимым возбуждением первого привода поворота (с постоянным моментом инерции).
Провести исследование модели электромеханической системы первого привода поворота робота-манипулятора с учетом нелинейности вида люфт.
Количественно оценить показатели качества: быстродействие, перерегулирование, максимальная динамическая ошибка.
2. ОБОРУДОВАНИЕ.
ПК с программным пакетом MatLab.
3.КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ.
В системах автоматического управления встречаются нелинейности самого различного типа. Нелинейные звенья можно классифицировать по самым различным признакам: симметрии, гладкости, однозначности, непрерывности харак-
теристик. Рассмотрим типовое нелинейное звено с многознач-
62
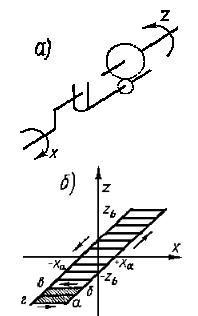
ными характеристиками, на примере звена типа « люфт». Одна из нелинейностей, наиболее часто встречающихся в механических системах, связана с наличием зазоров в системе передачи. В моделях нелинейности типа «люфт» зависимость между положением ведущего x и ведомого z валов неоднозначна. Характеристика, выражающая зависимость между положениями ведущего и ведомого валов, показана на рис.1 б
Рис.1 a – входной и выходной валы, 1 б - характеристика нелинейности вида люфт
Каждому положению ведущего вала x соответствует множество положений ведомого вала z, лежащее в пределах k(x-xa)≤ z ≤ k(x+xa). Выбор того или иного из возможных положений определяется минимальным или максимальным по-
ложением z, предшествовавшим рассматриваемому моменту времени.
Аналитически, характеристика звена типа «люфт» выражается должно образом:
0 |
при x |
0 |
и |
kxa |
kxa ; |
||
при x |
0 |
и |
kxa |
kxa |
; |
||
z |
|||||||
|
|
|
|
|
(1.1) |
||
|
при x |
0 |
и |
kxa ; |
|
|
|
kx |
|
|
|||||
при x |
0 |
и |
kxa ; |
|
|
||
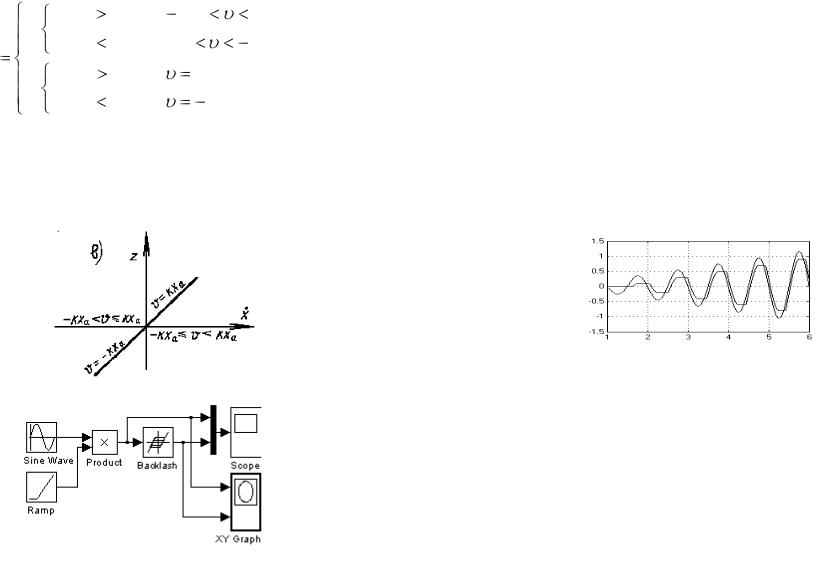
где x = dx/dt и ż = dz/dt, υ = kx-z
Зависимость z от x, выражаемая уравнением 1.1, для различных значений υ представлена на рис.1 в.
Рис. 1 в
63
Рис. 2 Структурная схема моделирования нелинейности вида люфт
Параметры блока люфта (Backlash) в Simulink:
1.Deadband width – Ширина люфта.
2.Initial output – Начальное значение выходного сигнала.
Сигнал на выходе будет равен заданному значению Initial output, пока входной сигнал при возрастании не достигнет значения (Deaband width)/2 (где U – входной сигнал), после чего выходной сигнал будет равен U-(Deaband width)/2. После того как, произойдет смена направления изменения входного сигнала, он будет оставаться неизменным, пока входной сигнал не изменится на величину (Deaband width)/2, после чего выходной сигнал будет равен U+(Deaband width)/2.
Рис. 3 Результат моделирования нелинейности вида люфт
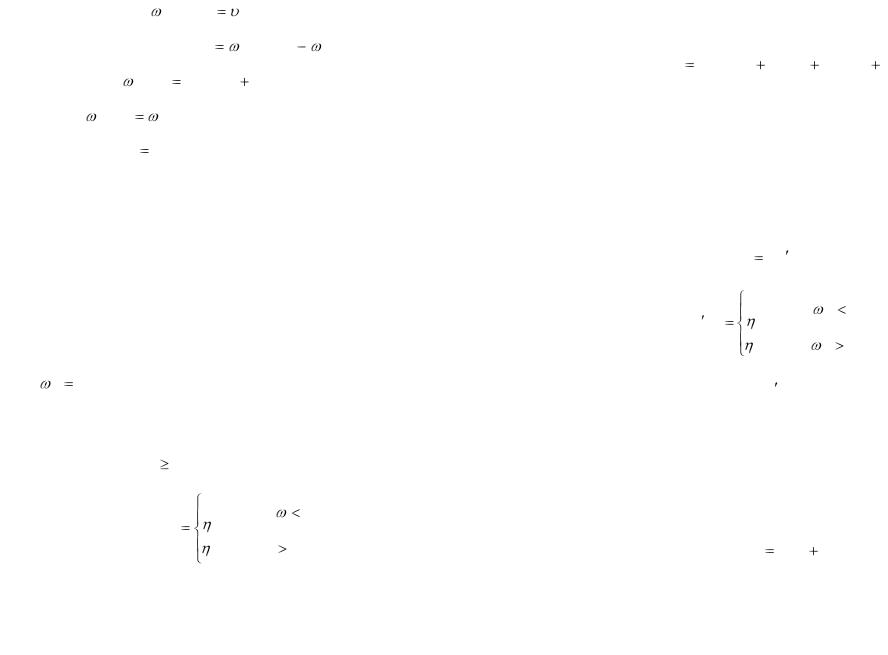
Динамика линеаризованного привода, механическая часть которого может быть принята абсолютно жесткой, описывается следующими уравнениями:
64
k y Ay ( p) Д .Х (t) |
(t), |
|
k Д В Д ( р)М Д (t) |
Д .Х . (t) |
|
J Д p |
Д (t) M Д (t) |
M Н . Д |
Д (t) |
(t)i p , |
|
M H (t) |
M H . Д i p k П. Д . |
|
Д (t),
(t), |
(1.2) |
Здесь Ау(р), ВД(р) — операторные многочлены, характеризующие инерционность усилителя и двигателя привода; kу, kД — коэффициенты пропорциональности; р — оператор дифференцирования по времени; ωД.Х — координата, имеющая размерность угловой или линейной скорости и зависящая от управляющего воздействия v(t); MД (t) — момент (усилие), развиваемый двигателем; MН(t) — суммарный момент (усилие), создаваемый нагрузкой; MН.Д(t) — момент (усилие) нагрузки MН(t), приведенный к валу двигателя; Jд — момент инерции или масса перемещающихся частей двигателя;
ω= q, Д |
qД — угловые либо линейные скорости переме- |
щения объекта, управления и двигателя; qД- — угловое или линейное перемещение вала двигателя; ip — передаточное число механической передачи, передающей движение от двигателя к объекту управления (ip l);
|
1 |
при М Н |
0, |
|
|
||
kП. Д |
|
|
(1.3) |
|
|
при М Н |
0, |
η—коэффициент полезного действия механической передачи (к.п.д.).
65
Момент нагрузки MН(t) в уравнениях (1.2) может быть представлен в виде:
М Н (t) М ДИН (t) МТ (t) МСТ (t) М В (t). (1.4)
Здесь Мдин—динамический момент, обусловленный инерционностью нагрузки; Мт — момент сопротивления, создаваемый силами трения на валу нагрузки; Мст — момент сопротивления, определяемый весом нагрузки;MB— внешний момент.
Приведенный к валу нагрузки момент, развиваемый двигатель (момент на выходе привода),
M П |
|
ipkП. Д М Д , |
(1.4) |
||
где |
|
|
|
|
|
|
1 |
при М Д |
|
0, |
|
|
|
Д |
|||
kП . Д |
|
|
|
(1.5) |
|
|
|
|
при М Д |
Д |
0; |
значение коэффициента |
|
kП. Д определяется аналогично |
|||
выбору коэффициента kП. Д |
в соотношении для приведения |
||||
момента нагрузки Мн в формулах (1.2), причем момент Мн определяется соотношением (1.4) с Мт = 0.
Первое уравнение в (1.2) — это уравнение усилителя, второе — уравнение двигателя. Для большинства двигателей
операторный многочлен Вд (р) имеет вид |
|
ВД ( р) Т Д р 1, |
(1.6) |
где Тд — постоянная времени двигателя. Третье уравнение (1.2) является уравнением моментов на валу двигателя.
66

4.ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ.
-Составить структурную схему MATLAB двигателя постоянного тока с постоянным моментом инерции и моментом нагрузки согласно математической модели 1.2.
-Произвести расчѐт постоянных времени двигателя, исходя из параметров двигателя.
Т э |
L |
(1.7) |
|
|
|||
R |
|||
|
|
- электромагнитная постоянная двигателя, характеризует инерционность электрических процессов в якорных двигателях;
J R |
Тм |
(1.8) |
|
|
|||
Ce Cм |
|||
|
|
электромеханическая постоянная времени, характеризует инерционный переходный процесс механического движения двигателя.
- Определить передаточную функцию объекта контура
тока
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
W ( p) |
|
|
|
R |
|
(1.9) |
|
L |
|
|
|||
|
|
p |
1 |
|||
|
|
|
|
|||
|
|
R |
||||
|
|
|
|
|
||
L – индуктивность обмоток двигателя постоянного тока, R – сопротивление двигателя.
-Добавить в структурную схему MATLAB нелинейность типа люфт.
-Провести исследование показателей качества: быстродействие, перерегулирование, максимальная динамическая ошибка
Варианты:
67
|
L, |
R,O |
|
|
|
|
|
|
Deadban |
|
м |
|
1 / J н |
Се |
См |
||||
|
м |
|
d width |
||||||
|
Гн |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0, |
|
100 |
|
0,0 |
0,0 |
0,01* |
||
5 |
|
|
86 |
86 |
U вх |
||||
|
|
|
|
|
|||||
2 |
0, |
|
200 |
|
0,0 |
0,0 |
0,04* |
||
3 |
|
|
53 |
53 |
U вх |
||||
|
|
|
|
|
|||||
3 |
0, |
|
300 |
|
0,0 |
0,0 |
0,05* |
||
8 |
|
|
45 |
45 |
U вх |
||||
|
|
|
|
|
|||||
4 |
1 |
|
400 |
|
0,0 |
0,0 |
0,06* |
||
|
|
|
|
32 |
32 |
U вх |
|||
|
|
|
|
|
|
||||
|
|
|
|
68 |
|
|
|
|
|
|
1, |
|
|
0,0 |
0,0 |
0,07* |
|||
5 |
|
|
500 |
|
|||||
2 |
|
|
|
23 |
23 |
U вх |
|||
|
|
|
|
|
|||||
6 |
1, |
|
600 |
|
0,0 |
0,0 |
0,08* |
||
4 |
|
|
14 |
14 |
U вх |
||||
|
|
|
|
|
|||||
-Оформить отчет по лабораторной работе. Отчет должен содержать:
-формулировку цели работы
-основные формулы и структурные схемы
-найденные показатели качества
5.КОНТРОЛЬНЫЕ ВОПРОСЫ.
-Напишите передаточную функцию объекта контура тока ДПТ.
-Какую характеристику имеет звено с «люфт»
-Приведите пример механической модели люфта.

ЛАБОРАТОРНАЯ РАБОТА №2
ИССЛЕДОВАНИЕ НЕЛИНЕЙНОСТИ ВИДА ЗОНА НЕЧУВСТВИТЕЛЬНОСТИ В БЛОКЕ ВТОРОГО ПРИВОДА ПОВОРОТА РОБОТА-МАНИПУЛЯТОРА.
1.ЦЕЛЬ РАБОТЫ
Провести исследование второго привода поворота робо- та-манипулятора в модели с блоком вычисления моментов нагрузки. Провести исследование нелинейностей вида «зона нечувствительности». Количественно оценить показатели качества переходного процесса: быстродействие, перерегулирование, максимальная динамическая ошибка.
2. КРАТКИЕ ТЕОРEТИЧЕСКИЕ СВЕДЕНИЯ
Характеристики звена типа «зона нечувствительности» показаны на рис. 1.
Рис. 1 Такими схемами обладают некоторые схемы электрон-
ных, магнитных и гидравлических усилителей в области малых входных сигналов. Простейшей70 механической моделью
зоны нечувствительности является система двух валов с пружинным возвратом ведомого вала в нейтральное положение при наличии участка свободного хода (люфта) в системе передачи. Такое соединение двух валов показано схематически на рис. 2.
Рис. 2
Здесь зона свободного хода ведущего вала имеет ширину 2xa . Характеристика звена (рис. 1,а) выражается следующими уравнениями:
|
|
0 |
при |
|
x |
|
xa ; |
z |
k (x |
xa ) |
при |
|
x |
xa ; |
|
|
k (x xa ) при x |
xa . |
|||||
Вводя переменные |
x / xa |
и |
z /(kxa ) , получим |
||||
нормированную характеристику: |
|
|
|
|
|||
|
|
0 |
при |
|
|
|
1; |
|
|
|
|
|
|||
|
|
1 |
при |
|
|
|
1; |
|
71 1 |
при |
|
|
|
1. |
|
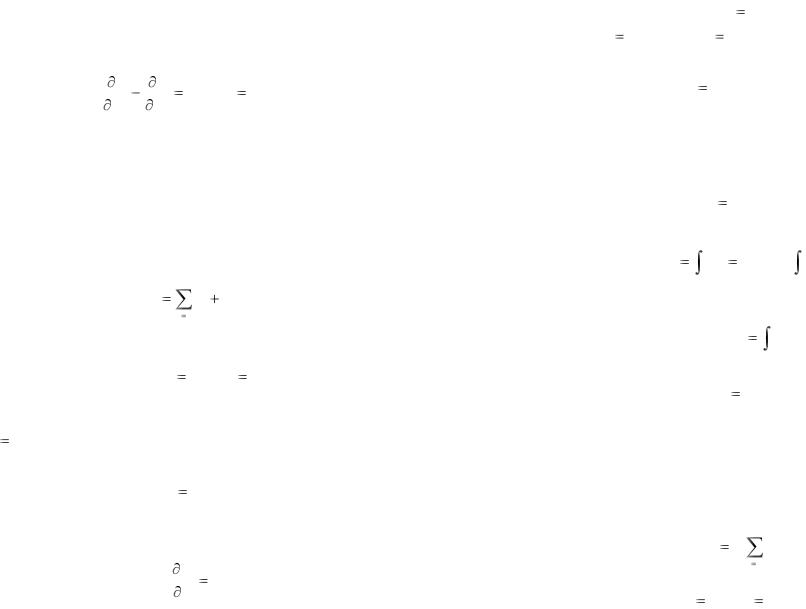
Уравнения Лагранжа II рода, которыми, как известно, можно описать любую голономную систему с n степенями свободы, имеет вид
d |
|
L |
|
L |
Qk |
, k 1, , n, |
(4.1) |
|
|
|
|
|
|||
dt |
|
qk |
|
qk |
|||
|
|
|
|
|
где L=T–П – функция Лагранжа системы, Т – кинетическая энергия системы, П – потенциальная энергия системы, qk
– обобщенные координаты, qk – обобщенные скорости, Qk –
обобщенные силы. Рассмотрим компоненты формулы (4.1) для манипулятора, представляющего собой разомкнутую кинематическую цепь из n звеньев, с учетом объекта манипулятора. Кинетическая энергия манипулятора равна сумме кинетических энергий его звеньев и объекта манипулирования:
|
n |
|
T |
Ti TГ |
(4.2) |
|
i 1 |
|
Здесь Ti – кинетическая энергия i-го звена, ТГ – кинетическая энергия груза (объекта манипулирования).
Обозначим через |
r i |
(xi |
,1)* |
(xi |
, xi |
, xi |
,1)* |
радиус- |
|
p |
p |
|
1 p |
2 p |
3 p |
|
|
вектор некоторой точки i-го звена в системе координат, связанной с р-м звеном (i=1, …, n; p=0, 1, …,n), и положим
r i r i . Тогда для элемента i-го звена |
dm |
i |
соответствующий |
0 |
|
|
|
ему элемент энергии |
|
|
|
dT |
1 |
|
r i |
|
2 dm , |
(4.3) |
|||
|
|
||||||||
|
|
|
|||||||
i |
2 |
|
|
|
i |
|
|||
|
|
|
|
|
|
||||
где rpi – радиус-вектор этого элемента, р=0, 1, …, n. Из |
|||||||||
формулы |
|
|
|
|
|
|
|
|
|
|
Ai |
|
Di Ai |
(4.4) |
|||||
|
|
|
|
|
|||||
qi
следует, что
72
r i B r i , |
(4.5) |
|
i |
i |
|
где Bi Bi (q1 , , qn ) Bi (q) |
- |
матрица перехода от i-й |
системы координат к инерциальной. Следовательно,
|
|
1 |
|
|
|
|
i |
|
i |
|
|
|
|
|
|
(4.6) |
|
dTi |
2 |
|
(Bi ri |
|
, Bi ri |
|
)dmi . |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Воспользовавшись известным соотношением для векто- |
|||||||||||||||||
ров a и b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(a, b) = a*b = tr (ab*) |
|
(4.6) |
||||||||||||||
перепишем формулу (4.2) в другом виде: |
|
|
|||||||||||||||
|
|
|
|
|
1 |
|
|
|
i |
|
|
i* * |
|
|
|
(4.7) |
|
|
dTi |
2 |
tr(Bi ri |
|
ri |
B |
)dmi . |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Полная кинетическая энергия i-го звена |
|
|
|||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
i |
|
i* |
|
* |
(4.8) |
Ti |
dTi |
|
|
2 |
tr(Bi |
|
( |
ri |
ri |
|
dmi |
)Bi ), |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где интеграл берется по объему i-го звена. Назовем мат- |
|||||||||||||||||
рицей инерции i-го звена |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
H |
i |
r i r i*dm ; |
(4.9) |
||||
|
|
i |
i |
i |
|
|
||
|
|
|
|
|
|
|
|
|
тогда |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
* |
|
(4.10) |
Ti |
|
2 |
tr(Bi |
Hi |
Bi |
). |
||
|
|
|
|
|
|
|
||
Теперь заметим, что объект манипулирования представляет собой некоторый груз, жестко связанный с последним (n- м) звеном. Поэтому последнее звено можно рассматривать совместно с грузом и матрицу инерции этого звена Hn формировать, учитывая груз. В результате получаем выражение для кинетической энергии манипулятора с грузом:
|
|
|
1 n |
|
|
* |
|
(4.11) |
|
|
T |
|
|
|
tr(Bi |
H i |
Bi ). |
||
|
|
2 i 1 |
|||||||
|
|
|
|
|
|
|
|
||
Элементы матриц Hi, i=1, …, n, хорошо известны в меха- |
|||||||||
нике. Учитывая, что r i |
(xi ,1)* |
(xi , xi |
, xi |
,1)* , |
можем запи- |
||||
i |
|
i |
1i |
2i |
3i |
|
|
||
сать
73

|
(xi |
|
)2 dm |
xi |
xi |
dm |
|||||
|
1i |
|
|
i |
2i |
|
|
1i |
i |
||
|
xi |
xi |
dm |
(xi |
|
)2 dm |
|||||
H i |
1i |
|
|
2i |
i |
2i |
|
|
i |
||
xi |
xi |
dm |
xi |
xi |
dm |
||||||
|
|||||||||||
|
1i |
|
|
3i |
i |
2i |
|
|
3i |
i |
|
|
xi |
|
dm |
xi |
|
dm |
|||||
|
|
1i |
|
i |
|
2i |
|
i |
|||
где mi – масса i-го звена;
J i |
J i |
(xi |
)2 dm , |
(2,3) |
(3,2) |
1i |
i |
xi |
xi |
dm |
xi |
dm |
|
|
||||
3i |
|
|
1i |
i |
1i |
|
|
i |
|
|
xi |
xi |
dm |
xi |
dm |
|
|
||||
3i |
|
|
2i |
i |
2i |
|
|
i |
, |
(4.12) |
(xi |
|
)2 dm |
xi |
dm |
|
|
||||
3i |
|
|
i |
3i |
|
|
i |
|
|
|
xi |
|
dm |
m |
i |
|
|
|
|||
|
3i |
|
i |
|
|
|
|
|
||
J i |
|
|
|
J i |
(xi |
)2 dm , |
||||
(1,3) |
|
(3,1) |
|
|
2i |
|
|
i |
||
J (1,i |
2) J (i2,1) |
(x3i i |
)2 dm (4.13) |
|
|
|
i |
– моменты инерции относительно плоскостей (x2i, x3i), (x1i, x3i), (x1i, x2i) соответственно;
J i |
J i |
xi |
xi |
dm , |
J i |
J i |
xi |
xi |
dm , |
12 |
21 |
1i |
2i |
i |
23 |
32 |
2i |
3i |
i |
J i |
J i |
xi |
xi |
dm |
(4.14) |
13 |
31 |
1i |
3i |
i |
|
– центробежные моменты.
Заметим, что для систем координат, связанных со звеньями, матрицы Hi, i=1,…,n, могут иметь совершенно произвольный вид, за исключением того, что они будут симметрическими. Если в качестве таких систем координат выбрать системы координат, оси которых являются осями главных эллипсоидов инерции звеньев, то матрицы Hi, i=1,…,n, будут иметь диагональный вид.
П р и м е р 4.1. Рассмотрим i-е звено манипулятора, являющееся однородной трубкой длины li, массы mi с внутренним и внешним радиусами R1i, R2i соответственно (i=1,…,n). Пусть система координат (x1i, x2i, x3i) выбраны так, что если сочленение Pi относится к типу вращение относительно про-
относится к типу вращение относительно про-
дольной оси звена или поступательное перемещение звена относительно его продольной оси, то ось x3i будет идти по оси i- го звена и
74
(R 2 |
R 2 |
) / 4 |
0 |
|
0 |
0 |
|
||
1i |
2i |
|
|
|
|
|
|
|
|
|
0 |
(R 2 |
R 2 |
) / 4 |
0 |
0 |
|
||
H i |
|
1i |
2i |
|
|
|
|
|
mi ; (4.15) |
0 |
|
0 |
|
l 2 |
/ 3 |
l |
|
||
|
|
|
i |
/ 2 |
|||||
|
|
|
|
|
i |
|
|
|
|
|
0 |
|
0 |
|
li |
/ 2 |
1 |
|
|
если сочленение Pi относится к типу, осуществляющее
относится к типу, осуществляющее
вращение звена относительно оси, перпендикулярной оси звена, то ось x2i будет идти по оси i-го звена и
(R 2 |
R 2 |
) / 4 |
|
0 |
|
0 |
|
|
|
0 |
|
|
1i |
2i |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
l 2 |
/ 3 |
0 |
|
l |
i |
/ 2 |
|
|
|
H i |
|
|
i |
|
|
|
|
|
|
mi |
. (4.16) |
|
0 |
|
|
0 |
(R 2 |
R 2 |
) / 4 |
|
|
0 |
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
1i |
2i |
|
|
|
|
|
|
|
0 |
|
li |
/ 2 |
|
0 |
|
|
|
1 |
|
|
Потенциальная энергия П манипулятора с грузом, очевидно, определяется формулой
n |
|
П g( 3 , mi Bi rc,i ), |
(4.17) |
i 1 |
|
где g – ускорение силы тяжести, 3 (0, 0, 1, 0)*, mi –
масса i-го звена, rc, i – радиус-вектор центра масс i-го звена в системе координат, связанной с этим звеном i=1,…,n.
Определим производные Т и П для уравнений (4.1). Так
как
n |
Bi |
n |
|
|
|
|
q j |
j |
|
|
|
Bi |
q j |
Bi |
q j |
(4.18) |
|
j 1 |
j |
1 |
|
|
(здесь матрицы Bi j , как и матрицы Bijl ниже, определены формулами
B j |
A1 |
Aj 1 D j Aj |
Aj 1 Ai |
, если j i, |
|
|
|
(4.19) |
|
i |
0, |
если с |
i; |
|
|
|
и
75
|
A1 Aj |
1 D j Aj |
Ak |
1 Dk Ak Ai , |
|
|
если |
|
|
j |
|
k i, |
|||||||||||||||
B jk |
A A |
j |
1 |
D |
2 |
A |
A , |
если |
|
j |
k |
i, |
|
|
|
|
|
, (4.20) |
|||||||||
i |
1 |
|
|
j |
j |
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
0, |
если |
|
j |
|
i |
|
|
и |
k |
|
i. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и B j |
0 для |
|
j |
i ), то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
1 |
n |
i |
tr(B j |
H |
Bl* )q |
|
q |
|
. |
|
|
(4.21) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
j |
l |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
2 i 1 j ,l 1 |
|
i |
|
i i |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
k-е уравнение Лагранжа в явном виде имеет вид |
|
|
|||||||||||||||||||||||||
n |
i |
|
|
|
|
|
|
|
|
|
|
n |
i |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tr(B j H B k* )q |
j |
|
|
tr(B jl H |
B k* )q |
j |
q |
l |
|
||||||||||||||||
|
|
|
i |
|
i |
|
i |
|
|
|
|
|
|
i |
|
|
i |
i |
|
|
|
|
|
||||
i k |
j 1 |
|
|
|
|
|
|
|
|
|
|
i k |
j ,l 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g( |
3 |
, |
|
|
m Bk r |
) |
|
M |
k |
, |
|
|
|
k |
|
1, , n. (4.22) |
|||||
|
|
|
|
|
|
|
|
|
|
|
i |
i |
c,i |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
i k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обобщенная |
|
сила, |
действующая |
|
в |
|
|
k-м |
сочленении |
||||||||||||||||||
( k 1, , n ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
M k |
Qk |
M п,k |
|
|
M в,k , |
|
|
|
|
|
|||||||||
где Mп,k – момент силы или усилие на выходе k-го привода; Mв k – внешний возмущающий момент или усилие, отнесенные к k-й обобщенной координате.
Перегруппировывая слагаемые в формуле (4.10), получим окончательный вид уравнений Лагранжа:
n |
n |
n |
|
|
|
|
|
|
|
|
|
|
|
|
ai |
q |
a ji q |
j |
q |
i |
|
a |
2k |
M |
k |
, k 1, , n, (4.23) |
|||
0k |
i |
1k |
|
|
|
|
|
|
|
|
||||
i 1 |
j 1 i |
j |
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
ai |
|
|
|
|
|
|
tr(Bi H |
B k* ), |
|||||
|
|
0k |
|
|
|
|
|
|
|
l |
l l |
|
||
|
|
|
l |
|
max(i,k ) |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
a ji |
|
ji |
|
|
|
|
|
tr(B ji |
H |
l |
B k* ), |
||
|
1k |
76 |
|
|
|
|
|
|
l |
|
|
l |
||
|
|
|
l |
|
max( |
i, j ,k ) |
|
|
|
|
||||
|
|
|
|
|
n |
|
a |
2k |
g( |
3 |
, |
m Bk r |
), |
|
|
|
i i c,i |
|
||
|
|
|
|
i |
k |
|
|
1, если j i, |
(4.24) |
|
ji |
2, если j i;i, j, k 1, , n. |
||
|
|||
|
|
Уравнение (4.11) можно более коротко переписать в виде
A(q, )q b(q, q, ) M, (4.25)
где  - вектор параметров манипулятора и перемещаемого им груза (длины звеньев, масса и моменты инерции звеньев,
- вектор параметров манипулятора и перемещаемого им груза (длины звеньев, масса и моменты инерции звеньев,
масса и моменты инерции груза и т. |
д.); A(q, |
) - матрица- |
|||||||||||
функция размерности n |
|
n с элементами |
|
|
|
||||||||
|
|
(A) |
ki |
ai |
, |
|
|
|
k,i |
|
1, , n; |
(4.26) |
|
|
|
|
0k |
|
|
|
|
|
|
|
|
|
|
b(q, q, ) - вектор-функция размерности n, элементы ко- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
торой |
|
|
|
n |
n |
|
|
|
|
|
|
|
|
|
b |
b |
b |
|
a ji q |
j |
q |
i |
a |
2k |
, |
k |
1, , n; (4.27) |
|
k |
k1 |
k 2 |
|
1k |
|
|
|
|
|
||||
i 1 j i
при этом второе слагаемое является моментом (усилием) в k-м сочленении, создаваемым весом нагрузки на валу k-го сочленения, от (k+1)-го, (k+2)-го, …, n-го звеньев манипулятора и груза.
Та простота, с которой мы можем находить положение и ориентацию звеньев манипулятора, т. е. вид матрицы Ti, существенно зависит от выбора системы координат звеньев Oi X iYi Zi . Рассмотрим способ построение системы координат,
77