

Filimonov_KONSPEKT_TMM
.pdfФедеральное агентство по образованию ГОУ ВПО «Нижнетагильский технологический институт (филиал)
Уральского государственного технологического университета – УПИ»
Филимонов И.Е.
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
Конспект лекций для студентов машиностроительных специальностей
всех форм обучения
Нижний Тагил
2008
2
УДК 621.01
Научный редактор: докт. техн. Наук, проф. М.А.Никитин
Филимонов И.Е.
Теория механизмов и машин [Электронный ресурс] : конспект лекций для студентов машиностроительных специальностей всех форм обучения. – Нижний Тагил: НТИ (ф) УГТУ-УПИ, 2008. – 66 с.
Предназначен для студентов машиностроительных специальностей при изучении дисциплины «Теория механизмов и машин».
|
3 |
ОГЛАВЛЕНИЕ |
|
1. ОСНОВНЫЕ ПОНЯТИЯ. СТРУКТУРА МЕХАНИЗМОВ................................. |
5 |
1.1. ПОНЯТИЕ МЕХАНИЗМА И МАШИНЫ. ВИДЫ МАШИН ...................... |
5 |
1.2. СТРУКТУРА МЕХАНИЗМОВ........................................................................ |
7 |
КИНЕМАТИЧЕСКИЕ ПАРЫ. КЛАССИФИКАЦИЯ.......................................... |
7 |
1.3. КИНЕМАТИЧЕСКИЕ ЦЕПИ........................................................................ |
10 |
1.4. ВИДЫ ЗВЕНЬЕВ МЕХАНИЗМА................................................................. |
11 |
1.5. СЕМЕЙСТВА МЕХАНИЗМОВ.................................................................... |
12 |
1.6. ПРИМЕРЫ МЕХАНИЗМОВ РАЗЛИЧНЫХ СЕМЕЙСТВ ........................ |
12 |
1.7. ПЛОСКИЕ МЕХАНИЗМЫ............................................................................ |
14 |
1.8. ГРУППЫ АССУРА......................................................................................... |
16 |
1.9.ПРИНЦИП СИНТЕЗА ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ......... |
18 |
1.10. ГРУППЫ АССУРА ТРЕТЬЕГО КЛАССА................................................. |
22 |
1.11. ВИДЫ РЫЧАЖНЫХ ЗВЕНЬЕВ................................................................. |
23 |
1.12. ЛИШНИЕ СТЕПЕНИ ПОДВИЖНОСТИ .................................................. |
25 |
1.13. ПАССИВНЫЕ КИНЕМАТИЧЕСКИЕ СВЯЗИ.......................................... |
25 |
2. АНАЛИЗ ОСНОВНЫХ РЫЧАЖНЫХ МЕХАНИЗМОВ ................................. |
27 |
2.1. АНАЛИЗ КРИВОШИПНО-КОРОМЫСЛОВОГО МЕХАНИЗМА........... |
27 |
2.2. ЦИКЛЫ В РЫЧАЖНЫХ МЕХАНИЗМАХ................................................. |
28 |
2.3. ДИАГРАММА ФУНКЦИИ ПЕРЕМЕЩЕНИЯ КОРОМЫСЛА................ |
29 |
2.4. УСЛОВИЕ СУЩЕСТВОВАНИЯ ККМ........................................................ |
30 |
2.5. МЕХАНИЗМЫ С КВАЗИОСТАНОВКОЙ.................................................. |
31 |
2.6. УГОЛ ПЕРЕДАЧИ ККМ................................................................................ |
32 |
2.7. ВАРИАНТЫ СБОРКИ ККМ.......................................................................... |
33 |
2.8. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ ЗВЕНЬЕВ ККМ........................................... |
33 |
2.9. АНАЛИЗ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА .................... |
35 |
2.10. УГОЛ ДАВЛЕНИЯ....................................................................................... |
36 |
В КРИВОШИПНО-ПОЛЗУННОМ МЕХАНИЗМЕ........................................... |
36 |
2.11. УСЛОВИЕ СУЩЕСТВОВАНИЯ................................................................ |
37 |
КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА............................................. |
37 |
2.12. МЕРТВЫЕ ТОЧКИ....................................................................................... |
37 |
В КРИВОШИПНО-ПОЛЗУННОМ МЕХАНИЗМЕ........................................... |
37 |
2.13. ВАРИАНТЫ СБОРКИ ................................................................................. |
38 |
КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА............................................. |
38 |
2.14. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ...................................................................... |
38 |
В КРИВОШИПНО-ПОЛЗУННОМ МЕХАНИЗМЕ........................................... |
38 |
2.15. АНАЛИЗ КРИВОШИПНО-КУЛИСНОГО МЕХАНИЗМА..................... |
39 |
2.16. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ ЗВЕНЬЕВ................................................... |
40 |
2.17. ВАРИАНТЫ СБОРКИ ККМ........................................................................ |
40 |
2.18. НЕКОТОРЫЕ ОБЩИЕ КИНЕМАТИЧЕСКИЕ СООТНОШЕНИЯ |
|
ВХОДНЫХ И ВЫХОДНЫХ ЗВЕНЬЕВ.............................................................. |
41 |
|
4 |
3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ МЕХАНИЗМОВ.................. |
42 |
3.1. ЗАДАЧИ КИНЕМАТИЧЕСКОГО АНАЛИЗА............................................ |
42 |
3.3. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ КИНЕМАТИЧЕСКОГО АНАЛИЗА........ |
43 |
3.3.1. АНАЛИТИЧЕСКИЙ МЕТОД РЕШЕНИЯ ЗАДАЧ |
|
КИНЕМАТИЧЕСКОГО АНАЛИЗА................................................................. |
43 |
3.3.2. МЕТОД ПРЕОБРАЗОВАНИЯ КООРДИНАТ....................................... |
47 |
3.4. КИНЕМАТИЧЕСКИЕ ПАРАМЕТРЫ МЕХАНИЗМОВ В ЛИНЕЙНЫХ И |
|
БЕЗРАЗМЕРНЫХ ВИДАХ................................................................................... |
48 |
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ ................ |
51 |
4.1. ЗАДАЧИ СИЛОВОГО АНАЛИЗА............................................................... |
51 |
4.2. МЕТОДЫ РЕШЕНИЯ ЗАДАЧ СИЛОВОГО АНАЛИЗА........................... |
55 |
4.2.1. АНАЛИТИЧЕСКИЙ МЕТОД..................................................................... |
55 |
4.3. СИЛОВОЙ АНАЛИЗ ВХОДНОГО ЗВЕНА (КРИВОШИПА) .................. |
58 |
4.4. ГОДОГРАФ..................................................................................................... |
60 |
4.5. АНАЛИТИЧЕСКИЙ МЕТОД........................................................................ |
61 |
ОПРЕДЕЛЕНИЯ РЕАКЦИЙ В КП...................................................................... |
61 |
4.6. КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ............................................ |
63 |
В МЕХАНИЗМАХ................................................................................................. |
63 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК...................................................................... |
66 |
5
1. ОСНОВНЫЕ ПОНЯТИЯ. СТРУКТУРА МЕХАНИЗМОВ
1.1. ПОНЯТИЕ МЕХАНИЗМА И МАШИНЫ. ВИДЫ МАШИН
Механизм и машина – это системные объекты, создаваемые Человеком. Для начала определим, что есть система, поскольку это понятие в дальнейшем будет широко использоваться в курсе.
Системой назовем совокупность материальных или нематериальных объектов (возможно, их сочетание) непосредственно связанных и взаимодействующих между собой или не взаимодействующих вовсе, которые объединены общей концепцией или необходимостью, а также свойством сохранения общей совокупности в неизменном или изменяющемся виде.
Исходным понятием для определения механизма и машины является техническое устройство.
Техническим устройством назовем материальный объект, созданный по инициативе и при участии Человека и предназначенный для выполнения конкретной цели. Представляет собой изделие, сооружение, совокупность природных объектов, преобразованных Человеком, а применительно к нашей теме - деталь, сборочный узел, автономный агрегат или их сочетание.
Механизм – это техническое устройство, предназначенное для преобразования движения одних твердых тел в требуемые движения других твердых тел.
Если промежуточные тела в механизме жидкие или газообразные, то такие механизмы называются гидравлическими или пневматическими.
Машина – это техническое устройство, имеющее в своем составе двигатель(и), системы механизмов, и других технических устройств, включающих системы регулирования и управления, предназначенное для выполнения целей функционального назначения.
Цели функционального назначения указаны в паспорте машины, но прежде, они формулируются в техническом задании на проектирование машины.
По функциональному назначению машины можно классифицировать следующим образом:
1). Энергетические машины – предназначены для преобразования какоголибо вида энергии (электрической, тепловой, электромагнитной, механической) в механическую энергию или, наоборот, механическую в другие виды.
Примеры: электрогенератор преобразует рабочую механическую энергию в энергию электрического тока; электродвигатель преобразует электрическую энергию в рабочую механическую энергию; гидродвигатель преобразует и передает рабочую механическую энергию для преодоления рабочих (технологических) нагрузок и перемещения рабочего звена машины.
Все остальные, перечисляемые ниже виды машин, имеют в своем составе обязательно одну или несколько энергетических машин (двигателей).
2). Технологические машины – используются для преобразования материалов.
6
Под преобразованием понимаем изменение размеров исходного материала, а также изменение физических и даже химических свойств.
Примеры: весь парк металлорежущего оборудования; насосы и компрессоры; кузнечно-прессовое и прокатное оборудование; термопластавтоматы; ткацкие и вязальные машины; машины для приготовления рабочих материалов и смесей; машины пищевой промышленности; сельскохозяйственные машины.
3). Транспортные машины – используются для перемещения масс в пространстве.
Примеры: автомобили; локомотивы; суда (морские, речные); воздушный транспорт; транспортеры – служат для перемещения масс на малые расстояния (ленточные, ковшовые, скребковые, шнековые, вибрационные, инерционные; краны – производят перемещение масс по воздуху, включая их подъем и опускание (автомобильные, башенные, грейферные, портальные, мостовые, консольно-поворотные, тали ).
4). Сервисные машины – предназначены для замены ручного неквалифицированного труда Человека.
Примеры: стиральные машины; посудомоечные машины; поливальные машины; снегоуборочные машины; пылесосы.
5). Дорожно-строительные и инженерные машины – предназначены для строительства дорог и прокладки коммуникаций.
Примеры: экскаваторы; бульдозеры; ПУМы.
6). Машины для ведения боевых и военных действий. Используются: как фактор сдерживания и упреждения агрессии, для показательного и демонстрационного эффекта, как средство для подготовки и обучения личного состава и, в крайнюю очередь, для поражения объектов противника.
Примеры: танки; боевые машины пехоты; самоходные артиллерийские установки; бронетранспортеры; боевые корабли.
Для военных действий используются военные и военно-инженерные машины, предназначенные для эвакуации, ремонта, безопасности и инженерных работ.
Примеры: саперные машины; машины-понтоны; ремонтные бронетранспортеры.
7). Информационные машины – предназначены для переработки и преобразования информации. В основном используются как встроенные в вышеперечисленные.
8). Машины-тренажеры – предназначены для воспроизведения условий работы других машин, а также имитации различных процессов (например, технологических), реальных или игровых ситуаций.
Примеры: учебное и учебно-лабораторное оборудование.
9). Машины-игрушки – предназначены для проведения досуга или для забавы.
Примеры: игровые автоматы.
Поскольку основной частью машины является совокупность механизмов, в дальнейшем, в рамках нашего курса, основное внимание уделим структуре

7
механизмов, а также кинематическим, силовым и динамическим взаимодействиям в них.
1.2. СТРУКТУРА МЕХАНИЗМОВ. КИНЕМАТИЧЕСКИЕ ПАРЫ. КЛАССИФИКАЦИЯ
Кинематической парой (сокр. КП) – назовем подвижное соединение двух тел (рис 1.1.).
|
z |
|
1 |
|
y |
x |
2 |
|
Рис 1.1. |
Тела, входящие в КП будем называть звеньями кинематической пары. Звено может состоять из нескольких частей, неподвижно соединенных
между собой, которые назовем деталями.
То, чем звенья соприкасаются в КП, называется элементом кинематической пары (точка, линия, поверхность или их сочетание).
Каждое звено в кинематической паре имеет возможность независимо двигаться вдоль или вокруг координатных осей относительно другого звена этой пары. Такие возможные независимые относительные движения назовем степенями свободы в КП. Число степеней свободы обозначим Н.
КП накладывает также ограничения на относительное движение звеньев в паре вдоль или вокруг координатных осей. Эти ограничения (невозможные относительные движения) назовем кинематическими связями. Число кинематических связей обозначим S.
Соотношение между числом степеней свободы и числом кинематических
связей в паре выразим: |
|
H = 6 −S , |
(1.1) |
где 6 – максимальное количество |
возможных движений свободного |
твердого тела.
Все многообразие кинематических пар разделим на классы, в которых номер класса равняется числу кинематических связей в паре. Поскольку: 1 ≤ H ≤5 , то из (1.1) следует, что и 1 ≤ S ≤ 5 . Таким образом, все многообразие подвижно соединенных звеньев укладывается в пять классов кинематических пар.
Изобразим существующие в механизмах кинематические пары в виде таблицы (табл. 1.1.)

S |
H |
1 |
5 |
|
/ / |
2 |
4 |
|
1 |
|
/ / |
3 |
3 |
|
1 |
//
Схема
1 2
/ /
/ /
2
1 2
/ |
/ |
2
|
|
|
/ / |
1 |
|
/ |
/ |
2
8
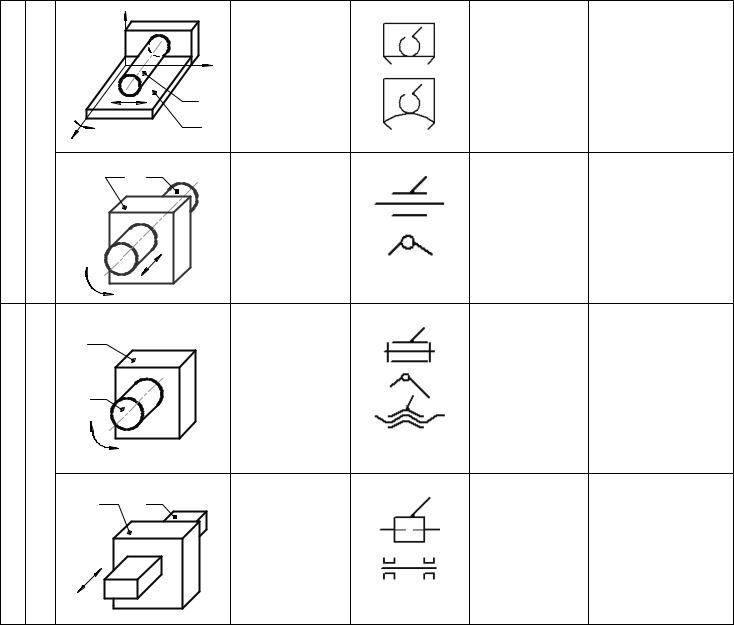
Табл 1.1. Классификация кинематических пар
|
Условное |
Наимено- |
|
|
Элемент |
обозначение |
Примеры |
||
|
(по ГОСТ ) |
вание |
|
|
точка |
точечная |
Шарико- |
||
|
||||
|
|
простран- |
винтовая |
|
|
|
ственная |
передача, |
|
|
|
|
контакт шарика |
|
|
|
|
и наружного |
|
|
|
|
кольца |
|
|
|
|
подшипника. |
|
отрезок |
|
линейчатая |
Контакт |
|
прямой |
|
простран- |
ролика и |
|
|
|
ственная |
наружного |
|
|
|
|
кольца |
|
|
|
|
подшипника. |
окружность |
сферическая |
Контакт |
или дуга |
|
шарика с |
окружности |
|
наружным и |
|
|
внутренним |
|
|
кольцом |
|
|
шарикопод- |
|
|
шипника. |
плоскость |
плоскостная |
Плоский |
|
|
контакт в |
|
|
подпятнике. |
|
|
Подпятник – |
|
|
упорный |
|
|
подшипник |
сфера |
|
скольжения. |
сферическая |
Шаровая |
|
|
или |
опора в |
|
сферическо- |
подвеске |
|
шарнирная. |
автомобиля. |
|
|
|
|
|
9 |
4 |
2 |
|
сочетание |
профильная |
Контакт |
|
|
|
отрезка |
|
сопряженных |
|
|
|
прямой и |
|
зубьев, |
|
|
1 |
круга на |
|
кулачковая |
|
|
торце |
|
пара. |
|
|
|
2 |
цилиндра |
|
|
|
2 |
1 |
цилиндричес |
цилиндри- |
Плунжерная |
|
|
|
кая |
ческая |
КП, |
|
|
|
поверхность |
|
используется в |
|
|
|
|
|
гидравлических |
|
|
|
|
|
механизмах. |
5 |
1 |
|
сочетание |
цилиндри- |
Встречается в |
|
2 |
|
цилиндри- |
ческая, |
подавляющем |
|
|
|
ческой и |
шарнирная |
большинстве |
|
1 |
|
торцовой |
|
машин. |
|
|
поверхно- |
|
|
|
|
|
|
|
|
|
|
|
|
стей |
пара: винт- |
|
|
|
|
|
|
|
|
|
|
|
гайка |
|
|
2 |
1 |
призмати- |
поступа- |
Перемещение |
|
ческая |
тельная |
суппортов в |
||
|
|
|
|||
|
|
|
поверхность |
|
металлоре- |
|
|
|
|
|
жущих станках |
|
|
|
|
|
по своим |
|
|
|
|
|
направляющим. |
Виды КП исчерпывают все многообразие подвижных соединений. Низшей КП назовем такую КП, у которой элементом является поверхность,
сочетание поверхностей.
Высшей КП назовем такую КП, у которой элементом является точка или линия.
Анализируя таблицу, к низшим отнесем 5 и 3 классы КП, к высшим 4,2 и 1 классы.

10
1.3. КИНЕМАТИЧЕСКИЕ ЦЕПИ
Кинематическая цепь (КЦ) – последовательное соединение звеньев, образующих между собой кинематическую пару (рис 1.2.).
1
 КП 5кл.
КП 5кл.
2
 КП 3кл.
КП 3кл.
3
КП 5кл. |
|
КП 3кл. |
|
||
|
||
|
4
 КП 1кл.
КП 1кл.
5
Рис. 1.2.
Кинематическая цепь, звенья которой движутся в одной или нескольких параллельных плоскостях является плоской. Если хотя бы для одного звена это условие не выполняется, то кинематическая цепь пространственная.
КЦ бывают замкнутыми, если у них нет свободных элементов КП и разомкнутыми, если такие элементы есть. Разомкнутые КЦ применяют в механизмах роботов-манипуляторов, назначение которых перестановка предметов, остальные механизмы реализуются замкнутыми КЦ.
Формула для определения числа степеней свободы в КЦ:
n |
|
H = 6 m − ∑Si = 6 m −(5 p5 + 4 p4 +3 p3 + 2 p2 + p1 ) , |
(1.2) |
i=1
здесь m – число звеньев цепи,
p5 , p4 ...p1 количество кинематических пар 5-го, 4-го … 1-го классов
соответственно.
Определим число степеней свободы для указанного механизма:
H = 6 m −(5 p5 + 4 p4 +3 p3 + 2 p2 + p1 ) = 6 5 −(5 2 + 4 0 +3 2 + 2 0 +1) =13 , т.е.
механизм имеет 13 независимых движений звеньев.
Для того чтобы из кинематической цепи получить механизм, необходимо КЦ подвижно присоединить к одному или нескольким неподвижным звеньям одной или несколькими КП либо одно или несколько звеньев в цепи сделать неподвижными (рис.1.3.). В дальнейшем неподвижное звено будем называть стойкой.
Степень свободы механизма вычисляем относительно стойки, с которой свяжем систему координат, и будем называть степенью подвижности механизма - W.