

МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Санкт-Петербургский государственный
инженерно-экономический университет»

Кафедра инженерных наук и технологий
Утверждаю
Проректор
по учебно-методической работе
и качеству образования
д.э.н., профессор
_________________В.И. Малюк
«_____» _____________20__ г.
Рег. № _____
Теоретическая механика и сопротивление материалов
Методические указания
к лабораторной работе
для студентов всех форм обучения
к теме 1 «Теоретическая механика»
Специальность 280400 – Природообустройство
Санкт-Петербург
2012
Допущено
редакционно-издательским советом СПбГИЭУ
в качестве методического издания
Составители
д-р техн. наук, проф. С.М. Галилеев
канд. техн. наук, доц. Л.В. Паршина
Рецензент
д-р техн. наук, проф. С.М. Галилеев
Подготовлено на кафедре
инженерных наук и технологий
Одобрено научно-методическим советом специальности
280400 – Природообустройство
Отпечатано в авторской редакции с оригинал-макета,
представленного составителями
СПбГИЭУ, 2012
СОДЕРЖАНИЕ
|
|
Введение………………………………………………….. |
4 |
|
1. |
Исходные данные для выполнения лабораторной работы……………………………………………………. |
5 |
|
2. |
Методические указания к выполнению лабораторной работы……………………………………………………. |
6 |
|
|
2.1. Построение траектории движения точек за один полный поворот кривошипа…………………………….. |
6 |
|
|
2.2. Определение скоростей и ускорений точек механизма………………………………………………… |
8 |
|
|
2.3. Исследование изменений скоростей и ускорений точек механизма………………………………………….. |
10 |
|
3. |
Требования к оформлению отчета по лабораторной работе…………………………………………………….. |
12 |
|
4. |
Контрольные вопросы…………………………………… |
12 |
|
5. |
Список литературы………………………………………. |
13 |
|
|
Приложение 1. Пример оформления титульного листа лабораторной работы………………….. |
14 |
Введение
Целью лабораторной работы является практическое применение знаний, полученных при изучении дисциплины «Теоретическая механика».
Работа связана с исследованием кинематических характеристик кривошипно-ползунного механизма:
траектории движения;
скорости;
ускорения отдельных точек.
Система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемое движение других твердых тел, называется механизмом.
Два тела, соединенные друг с другом подвижно, образуют кинематическую пару. Тела, составляющие пару, называютсязвеньями.
Механизм обязательно имеет неподвижные1, 5,ведущее2 иведомые3, 4 звенья (рис. 1).
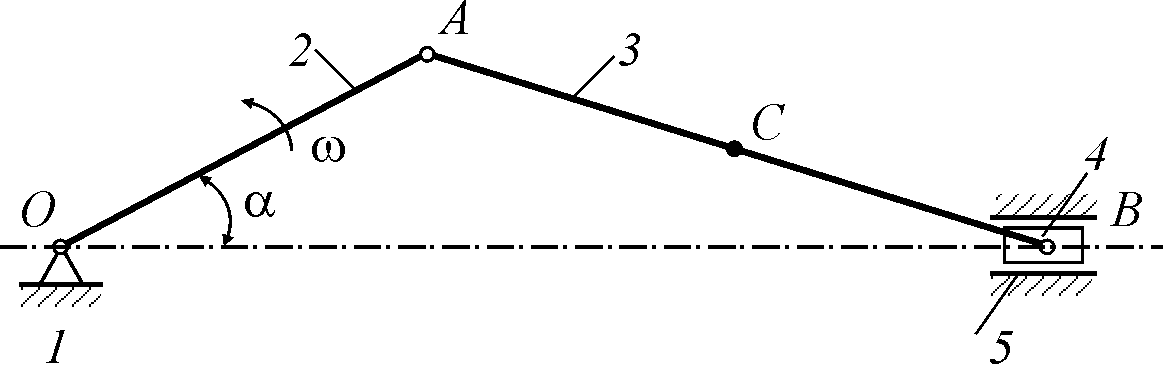
Рис. 1.Кривошипно-ползунный механизм
Неподвижное звено называется стойкой.Ведущимназывается звено, которое передает заданное движение.Ведомымназывается звено, воспринимающее движение.
В современных приборах и машинах широкое распространение получил кривошипно-ползунный механизм (рис. 1), состоящий из стойки 1, кривошипа2, шатуна3и ползуна4, движущегося в направляющих5.
Кривошипно-ползунный механизм служит для преобразования вращательного движения кривошипа в возвратно-поступательное прямолинейное движение ползуна. Наоборот, когда ведущим звеном является ползун, возвратно-поступательное прямолинейное движение ползуна преобразовывается во вращательное движение кривошипа.
Кривошипно-ползунные механизмы широко применяются в поршневых двигателях, компрессорах, прессах, насосах и т.д.