

Принцип действия преобразователя частоты
Для переноса спектра сигнала из области высоких (радиочастот) в область, промежуточных частот необходимо уменьшить частоту каждой его составляющей на одну и ту же величину. Сделать это можно одним из следующих двух способов:
1) вычитанием из частоты каждой составляющей спектра fс частоты вспомогательного генератора - гетеродина fг. Последняя выбирается так, чтобы разностная частота fс–fг была равна промежуточной частоте fn (рис. 3.3,а). Поскольку fс>fг, то этот способ принято называть преобразованием частоты с нижней настройкой гетеродина;
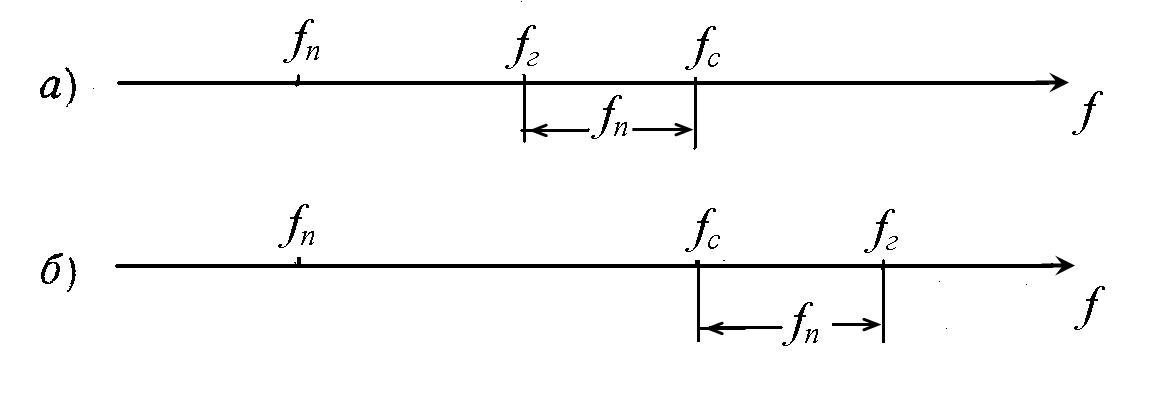
Рис. 3.3. Распределение частот при различных способах преобразования частоты: а) при нижней настройке гетеродина; б) при верхней настройке гетеродина.
2) вычитанием частот каждой составляющей спектра fс из частоты гетеродина fг с тем, чтобы разностная частота fг–fс равнялась промежуточной fn (рис. 3.3,б). В этом случае fг>fc и способ принято называть преобразованием частоты при верхней надстройке гетеродина.
Отличительной особенностью второго способа является инвертирование спектра сигнала в процессе преобразования частоты.
Ее нужно учитывать при приеме сигналов с несимметричным спектром (рис. 3.4,а). При нижней настройке гетеродина инвертирование спектра не происходит.

Рис. 3.4. Преобразование частоты: а) при верхней настройке гетеродина (происходит инвертирование спектра); б) при нижней настройке гетеродина.
17. Особенности построения схем приемника с АМ
Амплитудные детекторы
При амплитудной модуляции по закону изменения сигнала информации изменяется амплитуда радиочастотных колебаний.
Если до модуляции в антенне протекал ток iA = IАн cos ωt с постоянной амплитудой IАн то в процессе модуляции амплитуда тока должна получать приращение ΔIАн, которое изменяется во времени по закону изменения напряжения звуковой частоты. Если на микрофон воздействует переменное звуковое давление, изменяющееся по закону a = A cos Ωt, то на выходе микрофона создается напряжение звуковой частоты uΩ = U cos Ωt.
Выражение амплитуды тока в антенне при этом принимает вид IАн + ΔIАн cos Ωt, а формула для тока в антенне при модуляции iA = (IАн + ΔIАн cos Ωt) cos ωt= IАн (1+ ΔIАн / IАн cos Ωt) cos ωt = IАн (1+ m cos Ωt) cos ωt. Отношение ΔIАн / IАн называется коэффициентом модуляции и обозначается буквой т. Коэффициент модуляции можно определить по формуле:
m=(IAmax – IAmin)/ (IAmax + IAmin)
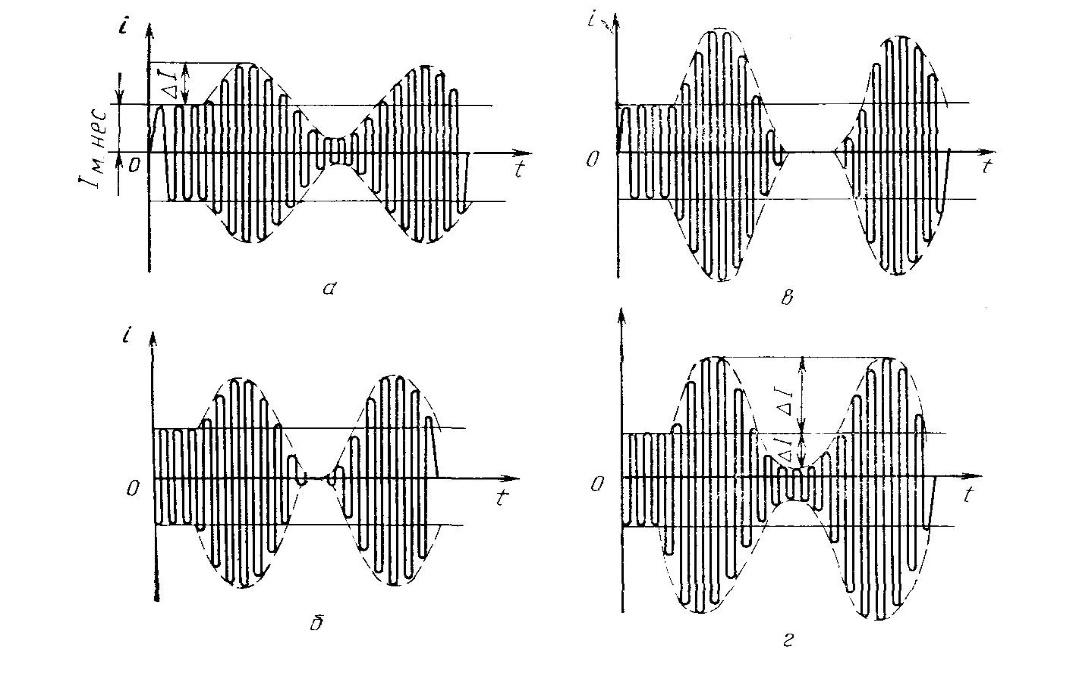
Рис. 4.3. Графики АМ колебаний при различной глубине модуляции.
На рис. 4.3. приведены графики модулированных колебаний при разной глубине модуляции. Значение коэффициента модуляции зависит от амплитуды напряжения звуковой частоты и для отсутствия искажений должно выбираться от 0 до 1.
При амплитудной модуляции одним тоном с частотой Ω , ток в антенне может быть представлен в виде iA = IАн cos ωt+0,5 IАн m cos(ω+Ω)t+0,5 IАн m cos(ω–Ω)t, передатчик излучает спектр частот, показанный на рис. 4.4, а.
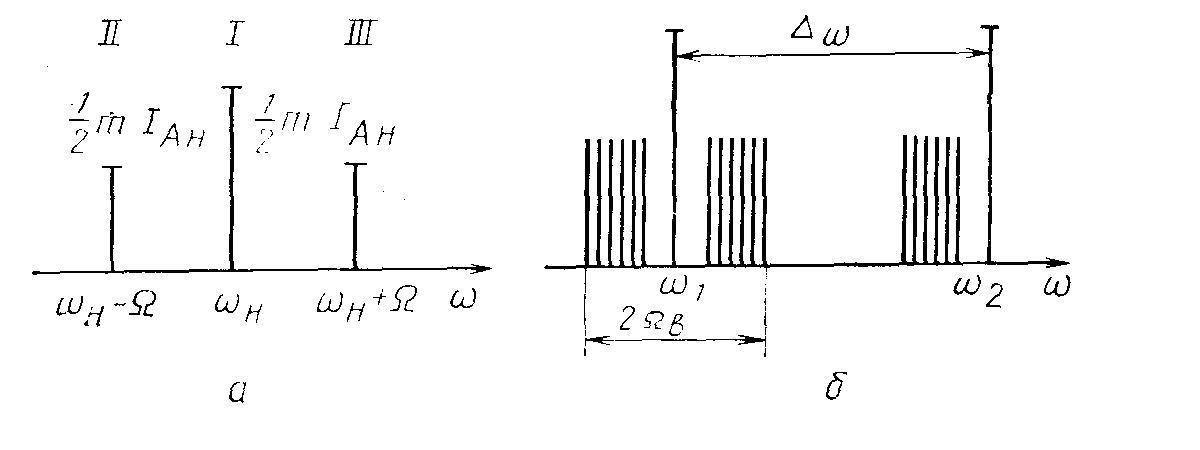
Рис. 4.4. Спектр сигнала с АМ.
Если модуляция осуществляется не одним тоном, а более сложным звуком (например, разговором, музыкой и т.д.), состоящим из целого ряда гармонических составляющих, то в составе модулированного колебания создается столько верхних и нижних боковых составляющих, сколько частот у модулирующего сигнала. Поэтому антенна передатчика будет излучать несущую частоту и две боковые полосы частот. График спектра частот при амплитудной модуляции сложным сигналом приведен на рис. 4.4, б. Анализ показывает, что спектр сигнала радиопередатчика при амплитудной модуляции занимает полосу частот, равную удвоенной наивысшей звуковой частоте, т.е. 2Ωв.
Для радиовещательных станций ширина полосы установлена равной 9000 Гц, для связных – 6000 Гц. Расстояние между несущими частотами соседних радиостанций должно быть не менее 10 кГц.
Детектор радиоприемника должен выделить закон изменения приращений амплитуды тока, который после прохождения по каналу радиосвязи может быть существенно искажен из-за действия помех. Тем не менее, при анализе принципов построения детекторов полагают, что принимаемы сигнала не имеет искажений. Это позволяет проанализировать работу детектора с точки зрения отсутствия вносимых им искажений. Для простоты анализа в качестве модулирующего сигнала чаще всего полагают гармоническое колебание звуковой частоты uΩ = U cos Ωt. На практике, при проведении измерений частоты звукового сигнала выбирается из ряда стандартных значений: 400 Гц, 1000 Гц и т.п.
В зависимости от амплитуды входного сигнала детектор работает в линейном или нелинейном режиме. При этом нелинейный режим может быть как при маленькой амплитуде сигнала (случай квадратичного детектирования), так и при чрезмерно большой амплитуде, когда происходит ограничение сигнала. Возникающие при этом гармоники детектируемого сигнала были подробно проанализированы на примере работы смесителя в нелинейном режиме. Отметим, что в этом случае детектор становится тем нелинейным элементом, из-за которого возникают в тракте модулирующей частоты интерференционные свисты и т.п. проявления помех. Подробный аналитический анализ работы детектора АМ сигналов выполнен в [1-3], поэтому предлагается для самостоятельного изучения студентами, а здесь, далее, рассмотрим схемные особенности детекторов.
18. Метод измерения чувствительности приемника, огр. шумами
Большое значение на качество приема радиосигналов оказывает уровень шумов на входе приемника. Источниками флуктуационных шумов в радиоприемном устройстве являются антенна, резисторы, электронные лампы и полупроводниковые приборы. Шумы антенны образуют входные шумы, а шумы, возникающие в элементах приемника, называют внутренними (собственными) шумами.
В антенне и в заземлении возникают тепловые шумы, но они очень незначительны, так как сопротивление потерь в этих устройствах мало. Значительно существеннее шумы, которые наводятся в антенне электромагнитными волнами, приходящими на Землю из космоса, тепловыми электромагнитными излучениями атмосферы Земли и самой Земли.
Шумы, вызванные тепловыми флуктуациями в резисторах, зависят прежде всего от температуры окружающей среды и сопротивления резистора.
Напряжение шумов на активном сопротивлении в этом случае определяется следующей формулой:
 (1.1)
(1.1)
где Uш
– среднеквадратическое значение
напряжения шумов, В; k
– постоянная Больцмана, равная
 Дж/к;Т
– абсолютная температура, К; Rш
– активное сопротивление, Ом; Пш
– полоса частот, в пределах которой
измеряется шумовое напряжение.
Дж/к;Т
– абсолютная температура, К; Rш
– активное сопротивление, Ом; Пш
– полоса частот, в пределах которой
измеряется шумовое напряжение.
В практических расчетах допустимо пользоваться формулой
 (1.2)
(1.2)
где Rш – в кОм; Пш – в кГц; Uш – в мкВ.
Шумы электронных ламп возникают вследствие флуктуаций анодного тока, которые известны как явление дробового эффекта. Это связано с непостоянством эмиссии катода во времени, что порождает флуктуации анодного тока, который на анодной нагрузке выделяет напряжение шумов. Кроме того, причинами возникновения шумов в лампах являются и такие, как нестабильность распределения электронного потока между электродами лампы, а также инерционность электронного потока. Последняя причина проявляется лишь на сверхвысоких частотах.
Причины шумов транзисторов в диапазоне высоких частот следующие: тепловые шумы распределенных активных сопротивлений базы, эмиттера и коллектора; флуктуации эмиттерного и коллекторного токов (дробовые шумы); случайные перераспределения токов между электродами транзистора (шумы распределения). Следует подчеркнуть, что в полевых транзисторах шумы проявляются значительно слабее, чем в биполярных.
В радиотехнике широко применяется понятие коэффициента шума, под которым понимается число, показывающее, во сколько раз отношение мощностей сигнал/шум на входе приемника больше отношения мощностей на выходе линейной части приемника, т. е. на входе детектора
 (1.3)
(1.3)
где Pс.вх, Pс.вых – соответственно мощность сигнала на входе и выходе; Pш.вх Pш.вых – соответственно мощность шумов на входе и выходе. В идеальном приемнике N = 1. В реальных приемниках N всегда больше единицы и он может увеличиться только за счет возникновения внутренних шумов, что вызывает возрастание мощности шума и ухудшение отношения сигнал/шум на выходе по сравнению с идеальным приемником. Поэтому коэффициент шума можно рассматривать как величину, которая показывает, во сколько раз ухудшится отношение сигнал/шум на выходе реального приемника по сравнению с идеальным и использовать его для оценки шумовых свойств отдельных каскадов приемника.
Из сказанного выше вытекает, что в приемниках уровень шумов можно уменьшить путем правильного выбора полосы пропускания и коэффициентов усиления первых каскадов, имеющих низкий уровень шумов.
Совершенно очевидно, что шумы приемника зависят от температурных условий и, следовательно, такой параметр, как шумовая температура Tш должен учитываться при характеристике шумовых свойств радиоприемных устройств с малым уровнем собственных шумов.
Шумовая температура – это температура, при которой некоторое сопротивление, подключенное к входу приемника (или любого четырехполюсника), создает на выходе линейной части приемника шумы, мощность которых равна мощности собственных шумов приемника.
Шумовая температура Tш связана с коэффициентом шума приемника и может быть выражена формулой
Tш = T0 (N – 1) (1.4)
Где T0 – абсолютная температура шумящего сопротивления, равная 293°К (20°С).
Чувствительность радиоприемника зависит не только от усилительных свойств приемника, но и от внутренних шумов. Количественно оценку чувствительности с учетом внутренних шумов можно получить из формулы (8.3). Отношение сигнал/шум на выходе линейной части приемника характеризует различимость сигнала на фоне шума и называется коэффициентом различимости
αр = Pс.вых / Pш.вых (1.5)
19. Методика измерения чувствительности, ограниченной усилением, в приемнике
чувствительность ограниченная усилением.
20. Методика измерения пороговой чувствительности в приемнике
Отношение сигнал/шум на выходе линейной части приемника характеризует различимость сигнала на фоне шума и называется коэффициентом различимости
αр = Pс.вых / Pш.вых (1.5)
При равенстве мощности сигнала Pс.вых и мощности шума Pш.вых когда αр = 1 (предельное минимальное значение коэффициента различимости), мощность полезного сигнала на входе Pс в этом случае будет характеризовать предельную (или пороговую) чувствительность приемника
Pс.пр = NPш (1.6)
21. ПЧ: нелинейный режим работы
В нелинейном
режиме
напряжение сигнала uc(t)
(возможно и напряжение промежуточной
частоты uп(t))
является сильным сигналом, изменяющим
параметры электронного прибора смесителя.
Выходной ток смесителя при подаче на
его вход косинусоидального напряжения
частоты ωс
будет содержать в общем случае составляющие
с частотами
 ,
гдеk,
l
= 0, 1, 2, 3,...
,
гдеk,
l
= 0, 1, 2, 3,...
Если входной сигнал имеет сложный спектр, то возможно появление новых комбинационных частотных составляющих, т.е. нелинейных искажений сигнала.
Для нелинейного режима характерно появление так называемых интерференционных свистов. Рассмотрим это явление на следующем примере. Пусть на вход преобразователя частоты (рис. 3.15,а) поступает сигнал с частотой fc=931 кГц (промежуточная частота приёмника fп=465 кГц). Необходимая частота гетеродина fг=fc+fп=931+465=1396 кГц. Из-за нелинейных свойств электронного прибора смесителя в его цепях появляются высшие гармоники частоты сигнала. Вторая гармоника сигнала 2fc=1862 кГц (рис. 3.15,б), взаимодействуя с частотой гетеродина, будет давать составляющую fп′=2fc–fг=1862–1396=466 кГц.
Оба компонента с частотами fп=465 кГц и fп′=466 кГц попадают в полосу пропускания УПЧ, усиливаются им и поступают на детектор приемника. В результате детектирования выделяется разностный сигнал частоты F=fп′–fп=466–465=1 кГц. Он прослушивается в виде свиста (отсюда название явления), сопровождающего программу полезного сигнала.
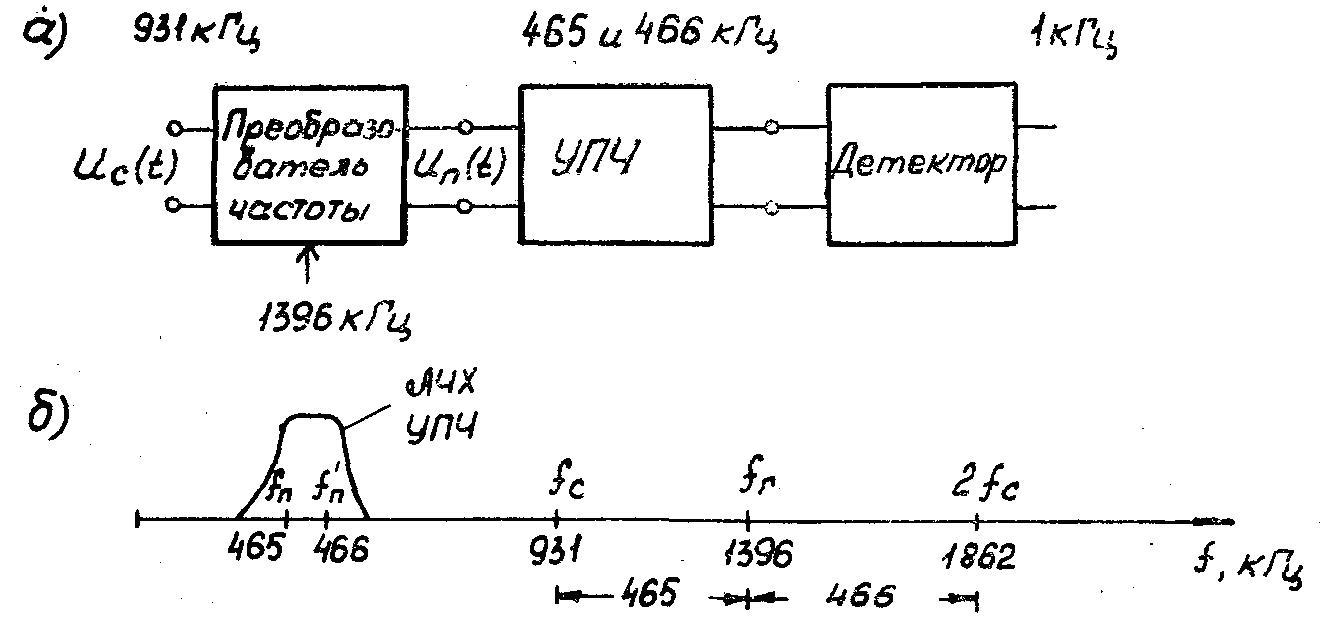
Рис. 3.15. К пояснению возникновения интерференционных свистов в преобразователе частоты: а - функциональная схема приемника; б - пример распределения частот.
Явление возникновения дополнительных сигналов в процессе преобразования частоты приводит к уменьшению отношения сигнал/шум, т.е. ухудшает чувствительность радиоприемного устройства.
Поскольку уровни сигналов, поступающих на вход приемника от антенно-фидерного устройства, могут отличаться друг от друга на несколько порядков, то для реализации параметрического режима работы смесителя в преселекторе предусматривают как автоматические (АРУ), так и ручные (РРУ) регулировки усилителя, ограничивающие уровень сигнала на входе ПЧ.
22. Особенности построения РПМУ с БМ и ОпМ (синхр. детектор, восст. несущей)
возможны два основных метода детектирования сигналов с подавленной несущей.
Первый метод предполагает восстановление в принимаемом радиосигнале подавленной несущей, т.е. получение тем самым АМ-сигнала, а затем уже задача сводится к известной – к детектированию АМ-сигнала с помощью амплитудного детектора. Однако фаза восстановленной несущей в двухполосном сигнале должна точно совпадать с фазой подавленной несущей. Тогда верхние и нижние боковые частот будут расположены симметрично относительно несущей, как показано на векторной диаграмме рис. 4.9, а. В противном случае, когда фаза несущей восстановлена неверно (рис. 4.9, б), сумма принятого сигнала и восстановленной несущей оказывается промодулированной как по амплитуде, так и по фазе. Это видно из рис. 4.9, б, где штриховой линией показано перемещение конца вектора, который изменяет не только длину, но и направление. При этом огибающая, выделяемая амплитудным детектором, искажается, т. е. не повторяет форму первичного сигнала, а ее амплитуда уменьшается по сравнению со случаем, когда фаза несущей восстановлена точно.
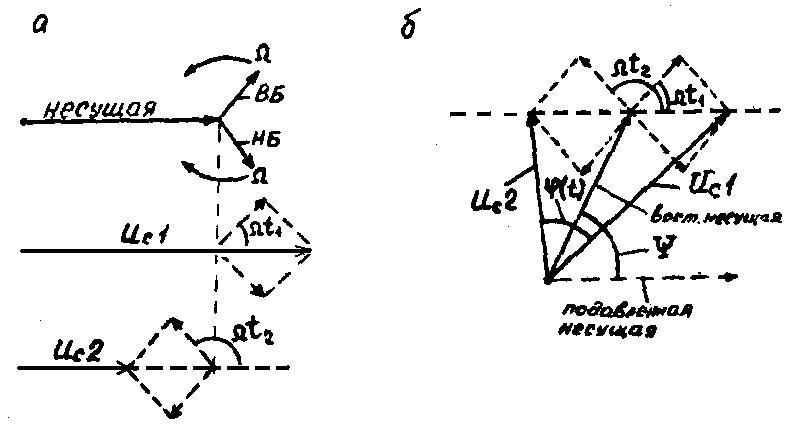
Рисунок 4.9. Векторные диаграммы АМ-сигнала при восстановлении несущей: а) точное восстановление; б) восстановление со сдвигом фазы.
На рис. 4.10 показана зависимость коэффициента гармоник kг от неточности восстановления фазы несущей ψ при детектировании двухполосного сигнала амплитудным детектором. Там же показано отношение амплитуды полезного сигнала на выходе детектора к ее значению при ψ=0. Кривые построены для двух значений отношения амплитуды восстановленной несущей к амплитуде одной боковой частоты. Первый случай – Uн/Uб=2 (штриховая линия, m=1) и второй случай – отношение равно 20 (непрерывная линия). Анализ хода графиков позволяет сделать вывод о том, что увеличивая амплитуду восстановленной несущей, можно снизить нелинейные искажения до допустимых величин, если неточность фазы ψ не очень близка к 90°. Однако, чтобы амплитуда продетектированного сигнала не была существенно снижена, при любой амплитуде несущей ошибка ψ не должна превышать 20-30°. Необходимо отметить также, что при больших значениях ψ ухудшается отношение сигнал-шум на выходе детектора, так как уменьшается амплитуда полезного сигнала; а мощность шума от ψ не зависит и остается постоянной.

Рисунок 4.10. Зависимость коэффициента гармоник от точности восстановления фазы несущей.
Значительно проще и благополучнее детектирование двухполосного сигнала без несущей осуществляется вторым методом – с использованием синхронного детектора. В этом случае принимаемый сигнал δ(t) умножается на опорное напряжение гетеродина (восстановленную несущую) Uωcos(ω0t+ψ) где ψ – погрешность при восстановлении фазы несущей
 (4.8)
(4.8)
Первый член (4.8) представляет собой высокочастотную составляющую произведения (с частотой 2ω0), которая отфильтровывается, второй – является результатом детектирования и пропорционален первичному сигналу x(t). Таким образом, при синхронном детектировании двухполосного сигнала никаких искажений не возникает, каковы бы ни были амплитуда Uω и начальная фаза φ восстановленной несущей. Неточность фазы вызывает только уменьшение уровня продетектированного сигнала, пропорциональное cos(φ-ψ). Если потребовать, чтобы уровень продетектированного сигнала уменьшался не более, чем на 10%, необходимо восстановить фазу несущей с точностью ±15°, если же допустимо снижение на 30°, то тре6уется точность фазы ±45°.
Преимущество синхронного детектирования перед детектированием огибающей суммы сигнала и восстановленной несущей очевидно. При обычной АМ, когда в принимаемом сигнале уже содержится несущая, детектирование огибающей наиболее просто, и поэтому практически только оно и используется. При передаче без несущей последнюю все равно приходится восстанавливать, т.е. синтезировать в приемнике. После этого синхронное детектирование выполняется столь же просто, как и детектирование огибающей.
Аналогичным образом решается задача детектирования ОМ-сигнала. Метод восстановления несущей и формирования АМ-сигнала приводит к нелинейным искажениям [6] полезного сигнала. Применение синхронного детектора избавляет от нелинейных искажений, хотя сохраняются линейные искажения, заключающиеся в фазовом сдвиге всех составляющих продетектированного сигнала на величину, противоположную погрешности фазы восстановленной несущей. Действительно, используя ОМ-сигнал δОМ(t) после синхронного детектирования получаем:
 (4.9)
(4.9)
Полезным здесь является второй (низкочастотный) член, который с точностью до постоянного множителя представляет первичный сигнал x(t)=X(t)cos[Ф(t)+φ] с фазами, сдвинутыми на угол (φ-ψ).
Как уже говорилось, ОМ представляет собой, в сущности, перенос спектра сигнала вверх на частоту ω0, а синхронное детектирование – обратный перенос вниз. Как и при всяком преобразовании частоты, здесь сохраняется огибающая сигнала, мгновенная же частота сдвигается на частоту гетеродина ωг=ω0. Начальная фаза при этом также смещается на величину, равную начальной фазе гетеродина ψ. Известно, что форма огибающей первичного сигнала отличается от формы самого первичного сигнала и, кроме этого, может существенно изменяться при изменении начальной фазы. Поэтому, если требуется передать точную форму первичного сигнала, то восстановленная несущая при ОМ должна точно совпадать по фазе с подавленной несущей. В этом случае принимать БМ-сигнал проще, так как допустимо отклонение фазы восстановленной несущей в пределах ±15°.
Однако дело коренным образом меняется, если первичный сигнал x(t) является звуковым. Слуховой аппарат человека устроен так, что он не воспринимает непосредственно фазовых соотношений составляющих звука. Поэтому, какова бы ни была начальная фаза ψ опорного сигнала, звук воспринимается одинаково, лишь бы сохранился его амплитудный спектр. В этих условиях ОМ-сигнал принимается проще, чем сигнал БМ, так как допустимый является любое значение начальной фазы восстановленной несущей. Более того, при передаче речи с помощью ОМ не только фаза восстановленной несущей произвольна, но и сама несущая частота может быть восстановлена не абсолютно точно. Неточность восстановления частоты в единицы герц совершенно не ощущается на слух и расстройка становится заметна при величине в несколько десятков герц – появляется хрип и “металлический” звук. При расхождении частот в 50–100 Гц эти искажения становятся весьма неприятными, однако разборчивость речи сохраняется довольно высокой вплоть до расстроек 200 Гц и более. Именно поэтому ОМ нашла широкое применение в военных системах радиосвязи для передачи в сетях оперативно-командной связи, где главным требованием является сохранение разборчивости речи (смысла передаваемой информации), а не её тембровая окраска.
23. ПЧ: параметрический режим
В параметрическом
режиме
напряжение сигнала uc(t)
и промежуточной частоты uп(t)
являются слабыми сигналами, не меняющими
параметров электронных приборов
смесителя. В выходном токе смесителя
содержатся в общем случае компоненты
с частотами
 ,
гдеk=0,
1, 2, Один из компонентов (при
,
гдеk=0,
1, 2, Один из компонентов (при
 )
выделяется фильтром и используется в
качестве промежуточной частоты.
)
выделяется фильтром и используется в
качестве промежуточной частоты.
24. Особенности построения схем приемников с ЧМ