

Методы составления систем дифференциальных уравнений движения механической системы
.doc
-
Методы составления систем дифференциальных уравнений
движения механической системы
Как было показано ранее, всякую реальную машину можно представить в виде абстрактной эквивалентной расчетной схемы. Массы на расчетный схеме имеют вид маховиков или поступательно движущихся масс, причем на каждую массу в схеме наложены связи, не зависящие от времени и запрещающие движения по всем координатам, кроме одной. Для масс расчетной схемы в виде валов с маховиком возможно движение только по координате φ, для поступательно движущихся масс – только по координате Х.
Следовательно, система масс расчетной схемы имеет число степеней свободы, равное числу масс, и движение ее описываются таким же количеством уравнений.
Рассмотрим методы составления уравнений движения.
-
Метод Даламбера
Даламбером был сформирован принцип, который позволяет составить уравнения движения тел для многих задач динамики методом, аналогичным методу решения задач статики.
Этот принцип гласит: при движении системы в каждый данный момент времени силы инерции масс системы, активные внешние силы и силы реакций связей удовлетворяют условиям статического равновесия.
Так для системы твердых тел, изображенной на рис 1.14, этот принцип можно записать в виде системы уравнений статики
 ,
,
где ![]() − сила инерции;
− сила инерции;
![]() - активная сила и
- активная сила и
![]() - реакция связи приложенные к
- реакция связи приложенные к
![]() массе.
массе.
![]() − момент от сил инерции,
активных сил и реакций связей относительно
произвольной точки О.
− момент от сил инерции,
активных сил и реакций связей относительно
произвольной точки О.

Рис.1.14 Двухмассная расчетная схема и силы, действующие на массы
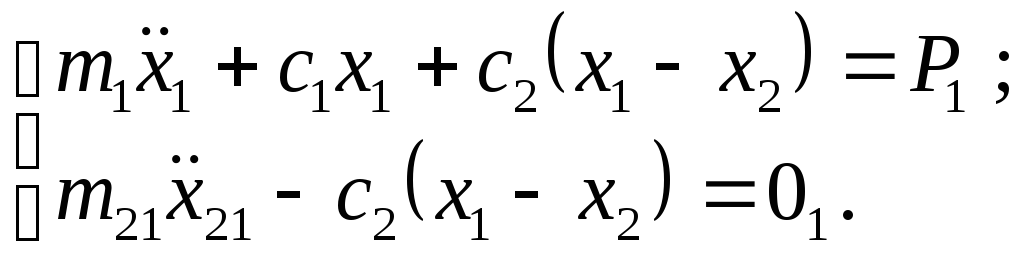
Составим по методу Даламбера уравнения движения системы. Мысленно отделим массы от упругого скелета системы, и для каждой массы запишем дифференциальное уравнение движения, причем действия упругих связей заменим их реакциями:
Для применения принципа Даламбера необходимо знать направление и величину всех сил, действующих на систему, а также направление ускорений всех масс системы. Однако во многих задачах динамики очень трудно определить направление ускорений, кроме того, обычно неизвестны реакции связей. Поэтому метод Даламбера не является универсальным и удобен лишь для ограниченного круга задач.
1.4.2. Метод Лагранжа
Известное из теоретической механики уравнение Лагранжа II рода имеет вид
![]() ,
(i=1...k);
(1.32)
,
(i=1...k);
(1.32)
где qi - обобщенные координаты;
T - суммарная кинетическая энергия системы;
Qi – обобщенные силы, соответствующие обобщенным координатам;
t – время.
Под обобщенными координатами понимают независимые друг от друга однозначные функции времени, при помощи которых полностью описывается положение системы в пространстве.
Так, например, для маятника (рис.2.15), положение массы m в пространстве может быть однозначно определено координатой φ- углом отклонения от вертикали жесткой связи массы с осью качания. Положение этой массы можно однозначно определить и двумя координатами У и Z.
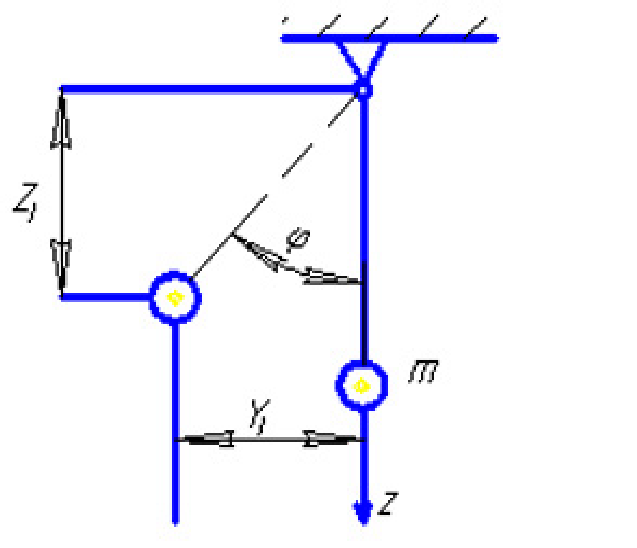
Рис.2.15 Определение положения массы маятника с помощью
декартовых Z1 и у1 или обобщенной φ координат
Однако эти координаты не являются независимыми, так как в любой момент времени должны удовлетворять уравнению Z2+Y2=l2, где l – длина жесткой связи.
Координату φ в данном случае можно принять в качестве обобщенной.
Обобщенная сила для каждой обобщенной координаты практически определяется следующим образом:
![]() ,
(i=1...k)
,
(1.33)
,
(i=1...k)
,
(1.33)
где Qi вн – внешняя активная сила, действующая на систему;
П – потенциальная энергия системы;
![]() - обобщенная сила, имеющая
потенциал, или консервативная сила
(сила тяжести, сила упругости);
- обобщенная сила, имеющая
потенциал, или консервативная сила
(сила тяжести, сила упругости);
![]() - функция рассеивания,
характеризующая уменьшение энергии в
единицу времени.
- функция рассеивания,
характеризующая уменьшение энергии в
единицу времени.
В
общем виде
![]() ,
,
где ![]() - коэффициент пропорциональности;
- коэффициент пропорциональности;
qi – обобщенная скорость;
m – показатель степени;
![]() - диссипативные силы (силы
сопротивления движению, силы сухого
или жидкостного трения и др.).
- диссипативные силы (силы
сопротивления движению, силы сухого
или жидкостного трения и др.).
Если
рассматривается система, для которой
кинетическая энергия зависит только
от обобщенных скоростей, но не зависит
от самих обобщенных координат, в
уравнениях Лагранжа член
![]() равен нулю.
равен нулю.
Подставляя (1.33) в (1.32), получим уравнение Лагранжа в следующем виде:
![]() .
(1.34)
.
(1.34)
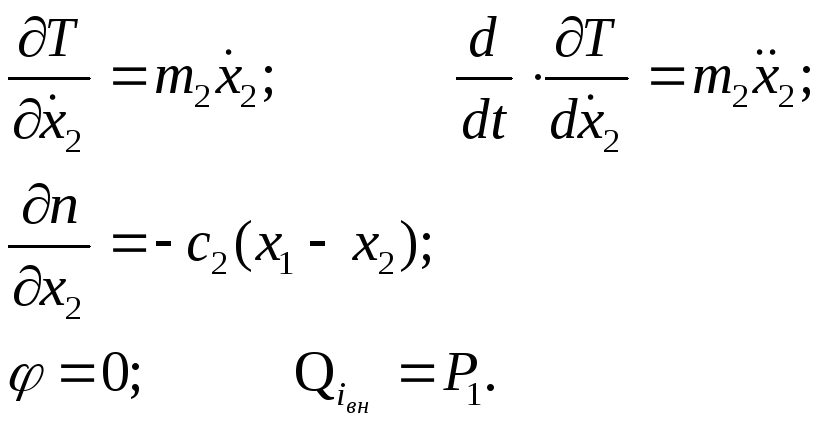
Составим уравнение движения нашей системы, используя уравнения Лагранжа (1.34).
В качестве обобщенных координат в данном случае лучше всего взять декартовы координаты х1 и х2.
Кинетическая энергия системы
![]()
Потенциальная энергия системы
![]()
для 1-й массы

![]() - обобщенная скорость;
- обобщенная скорость;
![]() -
обобщенная сила, имеющая потенциал;
-
обобщенная сила, имеющая потенциал;
для 2-ой массы
Подставив полученные выражения в уравнение (1.34), получим такую же систему уравнений, как и при использовании метода Даламбера.
Усложним задачу, введя в систему силы вязкого трения, силу P1 , изменяющуюся по закону P1= A sint.
Выражения
Т
и
n
останутся прежними. Функция рассеивания
![]() где
ε1
и
ε2
– коэффициенты пропорциональности,
характеризующие способность демпферов
рассеивать энергию,
где
ε1
и
ε2
– коэффициенты пропорциональности,
характеризующие способность демпферов
рассеивать энергию,
![]() P1=A
sint.
P1=A
sint.
Система уравнений после подстановки запишется
 (1.35)
(1.35)
Решив уравнения движения (1.35) относительно x1 и x2, можно найти нагрузки в упругих связях.
1.4.3 Составление уравнении для определения нагрузок в упругих
элементах по методу С. Н. Кожевникова
Если основной целью исследования считать определение нагрузок в упругих связях системы, то в качестве обобщенных координат, однозначно определяющих взаимное расположение масс системы (движение системы как единого целого в данном случае нас не интересует), можно принять моменты сил упругости, развиваемые в связях.
Рассмотрим метод Кожевникова на примере цепной неразветвленной системы из n масс, изображенной на рис. 1.16.
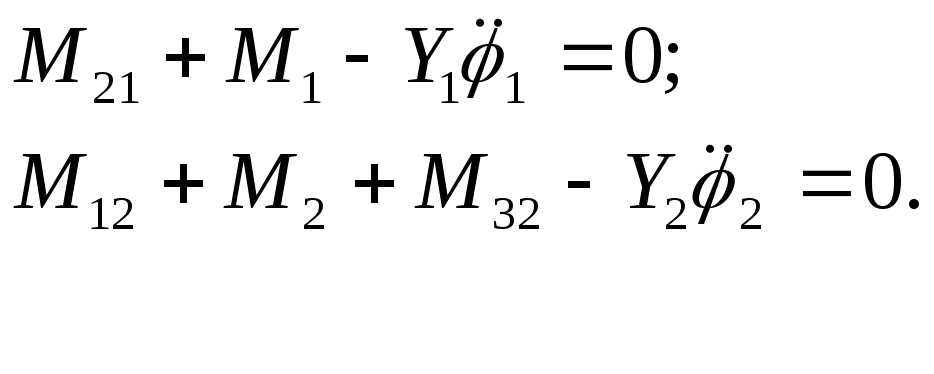
Выделим из системы (рис. 2.16, а) отдельные маховики, действие отброшенных масс заменим упругим моментом связи (см. рис. 2.16, б).
Например (см. рис. 2.16, а), М2,1 - упругий момент, заменяющий действие второй массы на первую. На выделенную массу У2 действуют момент М2 и заменяющие действие масс У1 и У3 на У2 моменты М12 и М32. Напишем уравнения равновесия для первых двух маховиков, используя принцип Даламбера:
а

б

Рис. 2.16 Цепная неразветвленная n – массная система:
а - эквивалентный вал; силы; б - силы, действующие на маховики.
Отсюда
![]()
![]() . (1.36)
. (1.36)
Умножив обе части равенства (1.36) на С12, при условии, что
С12 (1-2) = M12 , получим
![]() .
.
Учтем изменение знака момента сил упругости в зависимости от того, действует он на массу слева или справа, т.е.
![]() .
.
После преобразования получим
![]() (1.37)
(1.37)
где
![]() - парциальная частота собственных
колебаний двухмассной системы, полученной
выделением масс У1
и У2
со связью С12
без учета влияния других масс.
- парциальная частота собственных
колебаний двухмассной системы, полученной
выделением масс У1
и У2
со связью С12
без учета влияния других масс.
Рассматривая таким же образом последовательно все элементы эквивалентной системы, найдем следующую систему дифференциальных уравнений относительно упругих моментов
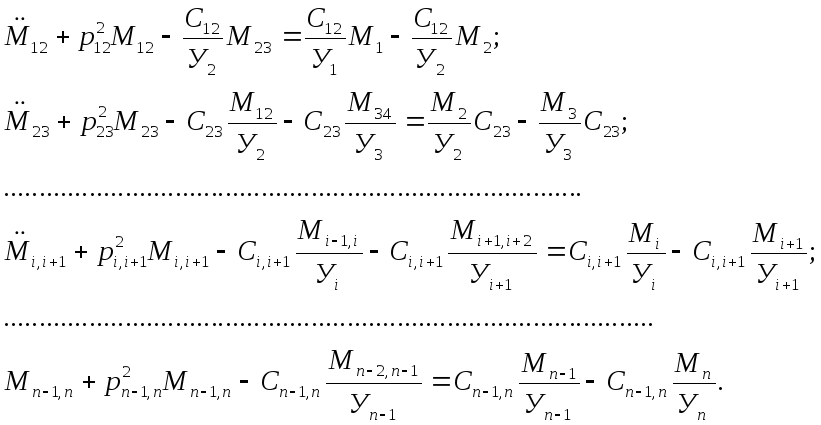 (1.38)
(1.38)
Так как упругая система связана n-1 связями, то число упругих моментов, подлежащих определению, также равно n-1. Преимуществом метода Кожевникова является уменьшение числа дифференционных уравнений на единицу. При решении уравнений системы сразу находим интересующие нас моменты упругих связей.
Для трехмассной системы уравнения для определения М12 и М23 запишутся в виде
 (1.39)
(1.39)
Если напряжения Mi на реальной схеме будут иными, чем на схеме, изображенной на рис. 1.12, то знаки Mi в системах (1.38) и (1.39) следует изменить на противоположные.
1.4.4. Применение метода Лагранжа при упрощении эквивалентной
расчетной схемы
Используя метод Лагранжа, составим систему дифференциальных уравнений движения системы (см. рис. 1.8) для случая запуска двигателя.
Подставляя в уравнения Лагранжа II рода выражение кинетической энергии (1.28), значение потенциальной энергии деформации связи
![]()
и обобщенные силы МД и МС, получаем дифференциальные уравнения движения системы:

или
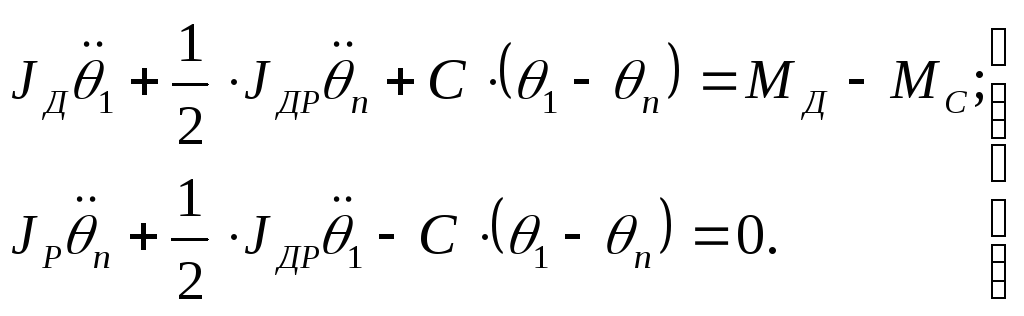 (1.40)
(1.40)
Незнание величин суммарных приведенных масс J1 и Jn упрощённой двухмассной расчётной схемы не помешает нам решить дифференциальные уравнения движения (1.40) относительно 1 и n или их разности 1 - n и найти нагрузки в упругой связи при запуске.
Итак, возможность на основе принципа Рэлея приближенной записи кинетической энергии как квадратичной функции скоростей только основных масс системы позволяет упрощать расчётную схему и сводить число степеней свободы до одной или двух.