

Лианеаризация не линейных характеристик
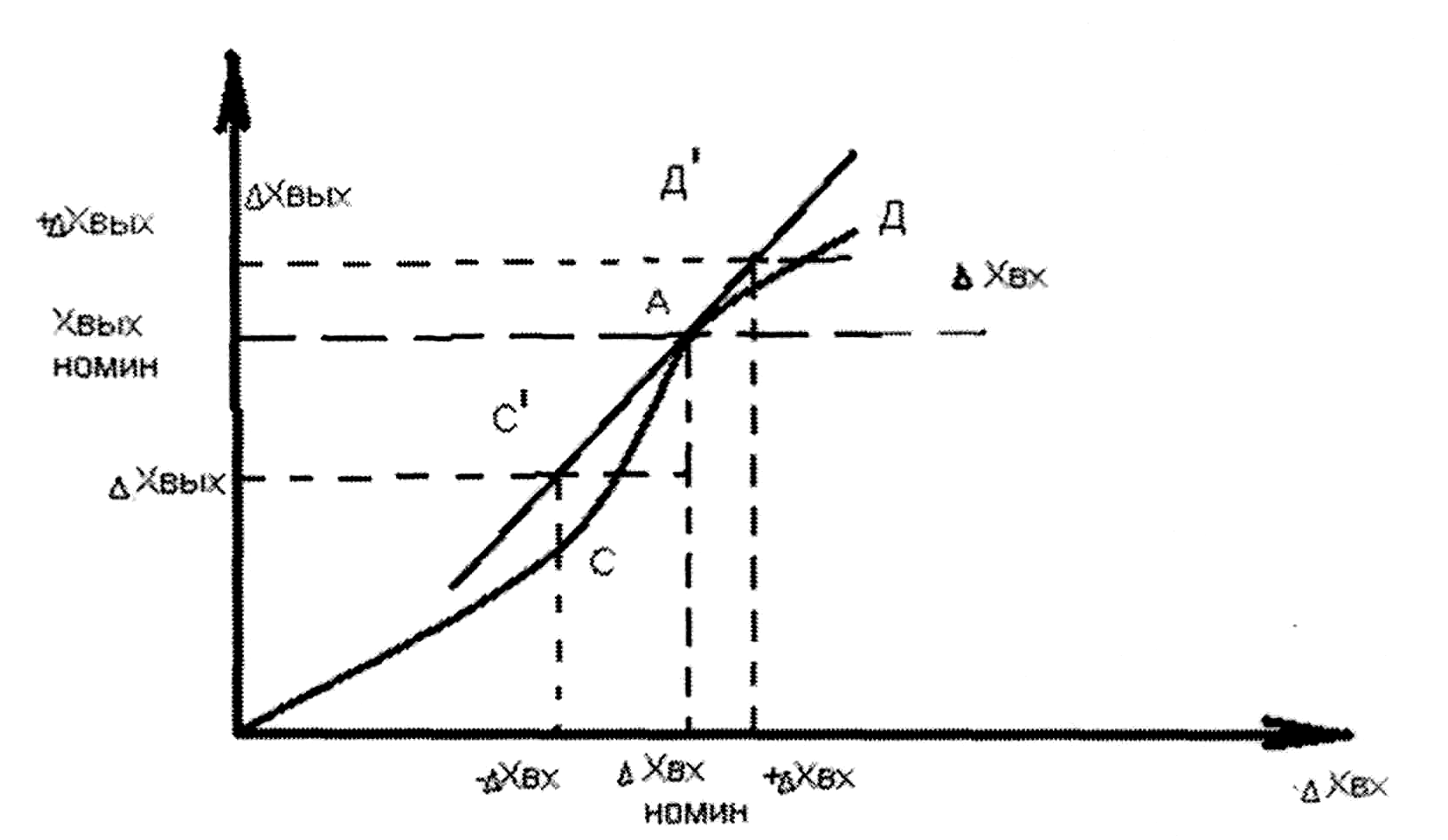
Выбираем на данной характеристику точке А, которая будет соответствовать задающему режиму работы элемента. С достаточной степенью точности криволинейный отрезок САД заменяется прямолинейным совпадающим с касательной, проведенной в этой кривой в точке А с координатой с «Д» и считается зависимость Хвых =f (Хвх) на этом участке линейной т.е. ΔХвых = К • Хвых
Хвых = f(Xвx), разложим в ряд Тейлора, по стечении малых отклонений в точке А:

Все частные производные берут в точке А, где функция Хвх имеет const значения, по этому коэффициент при Хвх и X2 вх будут постоянны. Кроме того, пренебрегают членами высшего порядка, начиная с X2 вх, тогда уравнение звена запишется:
Хвых а ± ∆Хвых= Хвых а ± К * ΔХвх, где
К= ΔХвых/ΔХвх= (df(Xвx)/дХвх)А
Этого и следовало ожидать, т.к. частная производная трактуется как tga касательной С"Д" в точке А, т.е. чем меньше отклонения от Хвх , тем больше линейная зависимость будет отражать истинную и чем ближе функция Хвых = Хвх к прямой, тем в больших пределах можно допустить линеаризацию. Существенное значение для анализов уравнений системы имеют начальные условия. Наиболее просто выглядит решение при 0 нулевых начальных точках, т.е. когда входная величина = 0 и все ее производные =0.
На практике начальные условия обычно не равны 0 и это усложняет их анализ. При анализе пользуются следующим приемом: принимать установившемся состоянием координатном системы в точке А = 0, т.е. учитывают величину Хвх, а ее отклонения Хвх, кроме того считают что все производные по времени от Хвых = 0.
Эту операцию производят переносом начала координат в точку А.
Математически эта операция производится вычитанием через данного выражения управления установившегося состояния.
Хвых а ± ΔХвых = Хвх а ± КΔХвх
Хвых а == Хвх± ΔХвх = ± КΔХвх
Т.е. теория автоматического регулирования оперирует только малыми отклонениями и эти отклонения связанны между собой линейными зависимостями.
Динамические характеристики элементов
/^

йХвых
JL
Изменения регулируемой величины во времени в результате того или иного возмущающегося воздействия вызванных этим возмущением действия регулятора называют процессом регулирования или переходным процессом (динамический режим).
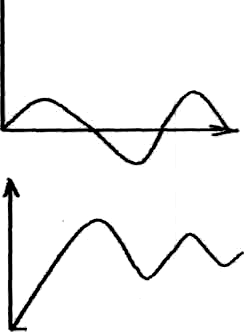
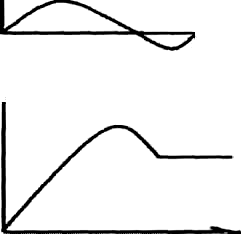
На рисунках представлены кривые переходных процессов вызванное как возмущением (А и Б, В, Г), так и изменением задания регулятору (Д и Е).
Пик выше пунктирной линии (точки задания) называется перерегулирование, на 20% выше задания (не больше).
График А - апериодически сходящиеся. Допустим, если Хмах < Хмах допустимого.
График Б - затухающий колебательный. Допустим: tp < tp допустимого.
График В - не затухающий колебательный. Допустим с малой амплитудой.
График Г расходящийся колебательный. Может быть допустим в системах автоматического регулирования (САР).
График Д - апериодически в результате управляющего воздействия.
График Е - колебательный в результате управления воздействия.
При изменении задания, отклонения отсчитывается от нового
установившегося значения, т.е. от оси абсцисс переносится в другую точку.
Если система в результате управляющего воздействия приходит к
равновесному состоянию, то она называется устойчивой (А, Б - графики).
В случае если регулируемая величина либо удаляется от значения заданного, либо совершает не затухающих колебаний - система не устойчива.
К САР представляются следующие требования:
Устойчивость;
Качество переходного процесса (минимальная статическая ошибка, minXmax, min tp)
Чем качественней система, тем она сложнее в реализации, поэтому при расчетах идут на компромисс между стремлением получить наиболее высокое качество регулирования и достичь решения задачи, возможно более простыми техническими средствами
Динамические свойства линейных элементов, а так же САР, часто описываются неоднородными, линейными, дифференциальными уравнениями.
Общий вид этих НЛДУ:

Динамические свойства не линейных элементов и систем описываются
дифференциальными уравнениями в частных производных и таких
уравнений представляющих еще большие трудности.
Поскольку большинство звеньев практически не линейные, для анализа их динамических свойств пользуются некоторыми искусственными приемами, заключающимися в следующем:
Не линейную характеристику; если это возможно подвергает линеаризации, т.е. криволинейный участок характеристики заменяют прямым.
Пользуясь преобразованием Лапласа сводят решение системы в сложным дифференциальных уравнений к системе алгебраических уравнений, решение которых не представляет трудностей.