

О скоростях деформаций
Если
скорость частиц сплошной среды
![]() =
(v
1,
v2,
v3),
то
за бесконечно малый промежуток времени
dt
среда
испытывает бесконечно
малую деформацию, определяемую
перемещениями ui
=
vidt(i
= 1, 2, 3). Компоненты этих деформаций,
вычисленные по формулам (1.17), имеют общий
множитель dt,
разделив
на который,
получим
=
(v
1,
v2,
v3),
то
за бесконечно малый промежуток времени
dt
среда
испытывает бесконечно
малую деформацию, определяемую
перемещениями ui
=
vidt(i
= 1, 2, 3). Компоненты этих деформаций,
вычисленные по формулам (1.17), имеют общий
множитель dt,
разделив
на который,
получим
![]() (1.25)
(1.25)
где ξij —компоненты тензора скоростей деформаций. Величины ξii определяют скорости удлинения (укорочения) единичных отрезков в направлениях охi, ξij(i≠j)— угловые скорости изменения первоначально прямых углов, составленных единичными отрезками вдоль координатных осей.
Подобно формуле (1.16) скорость удлинения (укорочения) любого единичного отрезка вычисляется по формуле
![]()
Аналогично соотношениям (1.20) — (1.22) инвариантами скорости деформации являются:
а) скорость относительного объемного расширения (сжатия)
![]() (1.26)
(1.26)
б) интенсивность скоростей деформации сдвига относительно главных осей
![]() (1.27)
(1.27)
где
![]() ,
,
![]() ,
,
![]()
— главные скорости сдвигов (относительно произвольной системы координат Н выражается формулой (1.21));
в)
параметр Надаи
![]() .
.
Компоненты скорости деформации ξij, как и компоненты деформации εij, не могут быть произвольными. Они должны удовлетворять условиям совместимости, аналогичным условиям (1.24).
Подобно представлению (1.23) для компонент тензора {ξij} скоростей деформаций верно соотношение
![]() (1.28)
(1.28)
где λij — компоненты, характеризующие только скорости деформации сдвига, называемые компонентами девиатора скорости деформаций.
Динамические величины и элементы теории напряжений
Для изучения движения сплошной среды в связи с причинами, которые это движение вызывают, вводят понятие о силах. Силы могут быть внешними и внутренними. Первые являются следствием воздействия на рассматриваемое тело других тел, а вторые возникают в результате взаимодействия элементов данного тела. Внешние и внутренние силы могут быть двоякого рода: объемные (или массовые) и поверхностные. Объемная сила действует на массу, заключенную в произвольном элементе объема тела, например сила тяжести.
П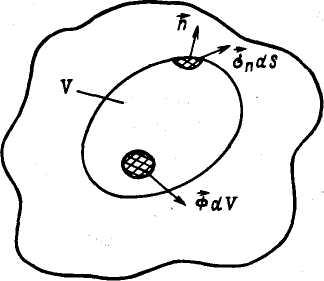 усть
усть![]() (x,t)—
объемная сила, отнесенная к единице
объема. Тогда сила, действующая на
бесконечно малый объем dV,
равна
(x,t)—
объемная сила, отнесенная к единице
объема. Тогда сила, действующая на
бесконечно малый объем dV,
равна
![]() dV,
а
на объем V—равна
dV,
а
на объем V—равна
![]() (рис.
1).
(рис.
1).
Поверхностная
сила действует на элементы, которые
можно мысленно
выделить внутри тела или на его
поверхности. Сила, действующая
на бесконечно малый элемент поверхности
dS,
равна
![]() ,
где
,
где
![]() — вектор силы, рассчитанный на единицу
площадиэлемента
и приложенный в любой его точке, называется
вектором
напряжения
или
просто напряжением
(см.
рис. 1).
— вектор силы, рассчитанный на единицу
площадиэлемента
и приложенный в любой его точке, называется
вектором
напряжения
или
просто напряжением
(см.
рис. 1).
Напряжение
![]() зависит от положения элементаdS,
т.
е. от
ориентировки его в теле. Если требуется
указать, что напряжение
зависит от положения элементаdS,
т.
е. от
ориентировки его в теле. Если требуется
указать, что напряжение
![]()
относится
к площадке с нормалью п,
то
пишут
![]() .
.
Проекции
этого вектора на оси произвольной
системы координат
Ох1х2х3
обозначаются
через σnj
(j=1,
2, 3).
В частности, проекции напряжений
![]() xi,
отнесенные
к площадкам, перпендикулярным к
координатным осям Oxi,
обозначаются
через σij
xi,
отнесенные
к площадкам, перпендикулярным к
координатным осям Oxi,
обозначаются
через σij
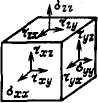
(i, j = 1, 2, 3), где σii называются нормальными напряжениями, а σij = σji (i≠j) — касательными напряжениями, действующими на этих площадках (рис. 5). Легко доказать следующие очень важные соотношения:
![]() (
i,
j
= 1,2,3), (1.29)
(
i,
j
= 1,2,3), (1.29)
которые
позволяют найти компоненты вектора
напряжения для произвольной
площадки с нормалью
![]() ,
проходящей
через точку
М;
,
проходящей
через точку
М;
αi = cos(n, хi) (i = 1, 2, 3).
 Поэтому
говорят, что совокупность шести величин
σij,
называемых
компонентами
симметричного тензора напряжений,
полностью
характеризует напряженное состояние
в точке тела М.
Поэтому
говорят, что совокупность шести величин
σij,
называемых
компонентами
симметричного тензора напряжений,
полностью
характеризует напряженное состояние
в точке тела М.
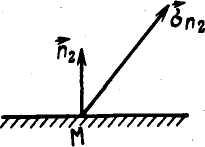
Рис.
5. Расположение компонент
тензора напряжений относительно
выбранной декартовой
системы координат
Рис.
6. Векторы напряжений в точке М,
действующие
в двух произвольно ориентированных
площадках

Рис.
7. Нормальная и касательная проекции
вектора
напряжения
![]()
Пусть
заданы две площадки, проходящие через
одну и ту же точку
М (рис. 6). Используя формулу (1.29), нетрудно
доказать, что
проекция напряжения
![]() ,
действующего на первую площадку, на
нормаль
,
действующего на первую площадку, на
нормаль
![]() ко второй равна проекции напряжения
ко второй равна проекции напряжения
![]() ,
действующего
на вторую площадку, на нормаль
,
действующего
на вторую площадку, на нормаль
![]() к
первой и вычисляется
по формуле
к
первой и вычисляется
по формуле
![]()
![]() (1.30)
(1.30)
где
α1i
и
α2j
— направляющие косинусы нормалей
![]() и
и![]() .
Этаформула
позволяет вычислить проекцию на любое
направление вектора напряжения,
действующего на данную площадку. В
частности, проектируя вектор
.
Этаформула
позволяет вычислить проекцию на любое
направление вектора напряжения,
действующего на данную площадку. В
частности, проектируя вектор
![]() на
направление нормали, получаем
нормальное напряжение (рис. 7)
на
направление нормали, получаем
нормальное напряжение (рис. 7)
![]() (1.31)
(1.31)
Касательное напряжение на этой же площадке равно
![]() (1.32)
(1.32)
где
σn
— величина вектора напряжения
![]() .
.
Из
формулы (1.30) следуют формулы перехода
от одной системы
Ох1х2х3
координат
к другой О![]()
![]()
![]() ;
;
![]() (1.33)
(1.33)
где σ'кr — компоненты тензора напряжений относительно новой системы координат;
αкi
= cos(![]() ),
αrj
= cos(
),
αrj
= cos(![]() ).
).
Например, зависимость между напряжениями в декартовой (Ох1х2х3) и цилиндрической (r, θ, z) системах координат с общей осью Ox3 = Oz имеет вид
σrr = σ11cos2θ + σ22 sin2θ + σ12 sin 2θ;
σθθ= σ11 sin2θ + σ22 cos2θ - σ12 sin 2θ; σzz = σ33;
σrθ
=![]() (
σ22
- σ11)sin
2θ + σ12
cos2θ;
(1.34)
(
σ22
- σ11)sin
2θ + σ12
cos2θ;
(1.34)
σrz = σ13 cosθ + σ23sin θ;
σθz= - σ13 sinθ + σ23 cosθ;
где σrr—радиальное напряжение, действующее на площадке, перпендикулярной к радиусу; σθθ — тангенциальное (окружное) напряжение, действующее на площадке, нормаль которой перпендикулярна к радиусу.
Принимая во внимание известные соотношения аналитической геометрии
![]()
из формул (1.33) после суммирования левой и правой частей по к (при r = к) получается важное соотношение
![]() (1.35)
(1.35)
Оно показывает, что величина σ, называемая средним нормальным напряжением, инвариантна по отношению к преобразованию системы координат.
Характерной особенностью напряженного состояния сплошной среды является наличие в каждой точке тела, по крайней мере, трех взаимно перпендикулярных площадок, на которых касательные напряжения σii (i≠j) равны нулю. Направления нормалей к этим площадкам образуют главные направления, которые не зависят от исходной системы координат. Соответствующие напряжения σii=σi называются главными нормальными напряжениями. Поэтому любое напряженное состояние в рассматриваемой точке может быть вызвано растяжением (сжатием) окрестности точки в трех взаимно перпендикулярных направлениях.
Главные нормальные напряжения могут быть найдены из следующего кубического уравнения:
![]()
корни этого уравнения могут быть только вещественными.
Так как решения этого уравнения хi = σi (i=1,2,3) не зависят от выбора системы координат, коэффициенты σ, А, В также не должны зависеть, т. е. они инвариантны. Это еще одно доказательство инвариантности среднего напряжения
![]() (1.36)
(1.36)
Два других инварианта
![]()
![]() (1.37)
(1.37)
физического смысла не имеют.
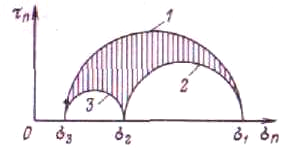 Рис.
8. Диаграмма Мора:
Рис.
8. Диаграмма Мора:
/, 2, 3 — окружности, координаты которых определяют нормальные и касательные напряжения на площадках, проходящих через главные оси 1, 2, 3 соответственно
Если главные направления совпадают с координатными осями (Охi), то формулы (1.31) — (1.34) упрощаются. Например, формулы (1.31) и (1.32) принимают вид
![]() (1.38)
(1.38)
![]()
где αi= cos (n, xi).
Отсюда нетрудно получить, что напряжения рп и τn могут лежать только внутри области, заштрихованной на рис.8. Это так называемая диаграмма Мора, дающая наглядное представление о напряжениях в различных сечениях, проходящих через данную точку. Здесь принята нумерация главных осей такой, чтобы выполнялись условия
σ1 ≥ σ2 ≥ σ3 (1.39)
Практический интерес представляют сечения, проходящие через главные оси. На рис. 8 точкам какой-либо окружности 1, 2 или 3 отвечают площадки, содержащие соответствующую главную ось.
Если площадка содержит главную ось Oxt и наклонена под углом θ к оси Ох2, то из формул (1.38) получается
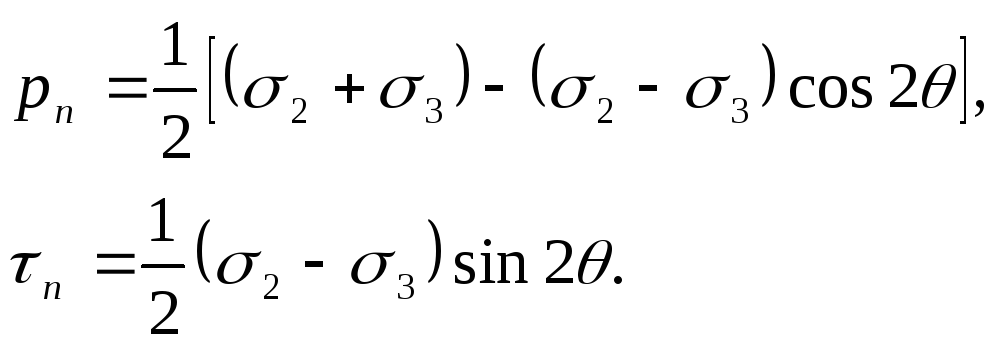
Эти напряжения соответствуют координатам точек окружности № 1 (см. рис. 8).
По аналогии можно записать формулы для напряжений, действующих на площадках, проходящих через две другие главные оси, иначе, для координат точек окружностей № 2 и 3 на рис. 8.
При θ = π/4, т. е. в сечениях, делящих пополам углы между главными плоскостями, касательные напряжения принимают экстремальные значения
![]()
![]()
![]()
называемые главными касательными напряжениями, а нормальные напряжения равны полусуммам
![]()
![]()
![]()
что соответствует координатам центров окружностей 1, 2 и 3 (см. рис. 8). Наибольшее из значений τi ( i = 1, 2, 3) называется максимальным касательным напряжением и обозначается τmax. Если условия (1.39) выполняются, то τmax = τ2.
Так
как различные тела обладают различными
механическими свойствами
по отношению к сдвигу и равномерному
всестороннему
сжатию, удобно компоненты тензора
напряжения представить
в виде суммы
![]()
где Sij—компоненты тензора, характеризующего касательные напряжения в данной точке и называемого девиатором напряжений.
Нормальные составляющие девиатора обозначают Sii = σii — σ, а касательные составляющие sij = σij (i≠j).
Главные направления девиатора напряжений (Sij) и тензора напряжений (σij) совпадают, а главные значения si отличаются от σi, на величину среднего (гидростатического) давления и определяются кубическим уравнением
-s3 + A1s+B1=0,
все корни которого также вещественны.
Инварианты A1 и В1 легко получить из формул (1.37), если заменить σij на sij и σi на si.
Неотрицательную величину
![]() (1.40)
(1.40)
называют
интенсивностью касательных напряжений.
Часто рассматривают приведенное напряжение или интенсивность напряжений
![]() (1.41)
(1.41)
Величина Т равна нулю только в том случае, когда напряженное состояние есть состояние гидростатического давления.
Доказывается, что с погрешностью не более 7% имеет место равенство
Т ≈ 1,08 τmax. Для характеристики вида напряженного состояния, подобно характеристике деформационного состояния, используется параметр, введенный Лоде и Надаи:
![]()
который изменяется в пределах от —1 до +1. Он указывает на взаимоотношение главных нормальных напряжений, в частности на положение точки σ2 на диаграмме Мора. Для одних и тех же величин μσ диаграммы Мора подобны.
Для чистого растяжения элемента (σ1>0, σ2= σ3 = 0) μσ= —1, для чистого сжатия (σ1 = σ2 = 0, σ3<0) μσ= 1, для сдвига (σ1>0, σ2=0, σ3= — σ1) μσ= 0, для гидростатического давления (σ1 = σ2 = σ3) μσ не имеет смысла.
Источник и сток в пространстве.
Рассмотрим еще один важный для дальнейшего пример потенциального течения. Пусть
![]() (**)
(**)
где ![]() ,
a Q =
const или Q
= Q
(t).
Ясно, что поверхностями равного
потенциала
= constявляются в этом случае поверхностиr =
const,т. е. концентрические сферы с
центром в начале координат. Скоростьv
=gradортогональна к этим сферам, т. е. направлена
по радиусам. Линии тока являются лучами,
выходящими из начала координат.
,
a Q =
const или Q
= Q
(t).
Ясно, что поверхностями равного
потенциала
= constявляются в этом случае поверхностиr =
const,т. е. концентрические сферы с
центром в начале координат. Скоростьv
=gradортогональна к этим сферам, т. е. направлена
по радиусам. Линии тока являются лучами,
выходящими из начала координат.
Пусть Q > 0;тогда, так какgradнаправлен в сторону роста, тоvнаправлена поr.Если Q < 0,тоv направлена по -r (рис. 6).Величина скорости равна:
|(gradr)|
=
![]() .
.
Скорость стремится к нулю при rи к бесконечности приr 0.Точки нуль и бесконечность являются критическими. ПриQ> 0(1) имеем
вытекание жидкости из начала координат во всех направлениях —это течение называется точечным пространственным источником. При Q < 0 (2) —втекание жидкости в начало координат —сток. В первом случае в бесконечно удаленной точке имеем сток, а во втором —источник.
Рис. 6
Вычислим объем жидкости, протекающей за единицу времени через поверхность сферы Sнекоторого радиусаrс центром в начале координат. Через элемент сферыdза единицу времени протекает объем жидкости d,а через всю сферу
![]() (расход жидкости)
(расход жидкости)
( можно вынести за знак интеграла, так как =constна поверхности сферы). Заметим, что первые два равенства верны всегда, когда = (r) и ортогональна к поверхности сферы S.Вычисленный объем жидкости не зависит отr. Таким образом, несмотря на то, что на разных сферах разного радиуса с центром в начале координат скорости разные, постоянная Qв потенциале (**)является объемом жидкости протекающей за единицу времени через каждую такую сферу. Величина Qназывается расходом или мощностью источника (стока).
Если Q = const,то источник или сток имеет постоянную мощность; еслиQ = Q (t) —то переменную. Если в некоторый момент времени Qменяется в начале координат, то мгновенно измеряется поле скоростей во всем пространстве. Сигналы изменение Qсразу сказываются на всем поле скоростей, что, конечно, не может иметь места в действительности. Возмущения должны распространяться с некоторой конечной скоростью. Поэтому рассмотренное поле скоростей является определенной идеализацией, которая может достаточно хорошо отражать действительность только в том случае, когда рассматриваются течения жидкости с большой скоростью распространения возмущений. Во многих случаях можно считать, что такой жидкостью является, например, вода, в которой скорость распространения слабых возмущений 1450м/сек.