

Министерство образования и науки Российской Федерации
ФГБОУ ВО «Магнитогорский государственный технический университет им. Г.И. Носова»
Институт энергетики и автоматизированных систем
Кафедра Электроники и микроэлектроники
Лабораторная работа №2
Изучение датчиков линейного положения
Выполнил: студент группы АНБ-14-2
Михайлицын А.С.
Проверил: к.т.н. доцент кафедры ЭиМЭ
Евдокимов С.А.
Магнитогорск 2016
1. Цель работы
1) Изучить принцип действия и основные характеристики преобразователя линейных перемещений.
2) Самостоятельно изучить принцип работы, назначение и технические характеристики оптического и магнитного линейного преобразователя перемещения, схему их подключения, а также работу квадратурного энкодера PF1 лабораторного стенда.
3) Ознакомиться с методами экспериментального исследования данных устройств и определения точности преобразования положения в электрический сигнал.
4) Сравнить экспериментальные характеристики с теоретическими и оценить погрешности;.
5) Выявить недостатки инкрементальных датчиков.
2. Результаты лабораторной работы
2.1. Снятие экспериментальной характеристики зависимости показаний квадратурного энкодера PF1 в миллиметрах от фактического положения оптического датчика.
Перемещая вправо и влево образцовый измеритель, используя колёсико точного перемещения отрезками по 10 мм, записываются показания образцового измерителя и энкодера в таблицу 1 и 2. Рассчитываются абсолютная и относительная погрешности.
Таблица 1
|
№ |
Показания образцового датчика LОБР, мм |
Показания оптического датчика LДАТ, мм |
Абсолютная погрешность ΔL, мм |
Относительная погрешность на текущем расстоянии δL, мм |
|
0 |
0 |
0 |
0 |
- |
|
1 |
10,05 |
9,8 |
-0,25 |
-2,55102 |
|
2 |
20,03 |
19,7 |
-0,33 |
-1,67513 |
|
3 |
30,06 |
29,8 |
-0,26 |
-0,87248 |
|
4 |
40,01 |
39,8 |
-0,21 |
-0,52764 |
|
5 |
50,08 |
49,8 |
-0,28 |
-0,56225 |
|
6 |
60 |
59,8 |
-0,2 |
-0,33445 |
|
7 |
70 |
69 |
-1 |
-1,44928 |
|
8 |
80 |
79,9 |
-0,1 |
-0,12516 |
|
9 |
90 |
89,9 |
-0,1 |
-0,11123 |
|
10 |
100 |
99,8 |
-0,2 |
-0,2004 |
Таблица 2
|
№ |
Показания образцового датчика LОБР, мм |
Показания оптического датчика LДАТ, мм |
Абсолютная погрешность ΔL, мм |
Относительная погрешность на текущем расстоянии δL, мм |
|
0 |
100 |
98,8 |
-1,2 |
-1,21457 |
|
1 |
90,01 |
89,7 |
-0,31 |
-0,3456 |
|
2 |
80 |
79,6 |
-0,4 |
-0,50251 |
|
3 |
70 |
69,6 |
-0,4 |
-0,57471 |
|
4 |
60,01 |
59,5 |
-0,51 |
-0,85714 |
|
5 |
50,02 |
49,5 |
-0,52 |
-1,05051 |
|
6 |
40,01 |
39,6 |
-0,41 |
-1,03535 |
|
7 |
30,01 |
29,6 |
-0,41 |
-1,38514 |
|
8 |
20,01 |
19,4 |
-0,61 |
-3,14433 |
|
9 |
10,02 |
9,5 |
-0,52 |
-5,47368 |
|
10 |
0,02 |
0 |
-0,02 |
- |
После этого строятся зависимости LДАТ =f(LОБР). Эти зависимости оказались близки идеальной прямой (рисунок 1 и рисунок 2).
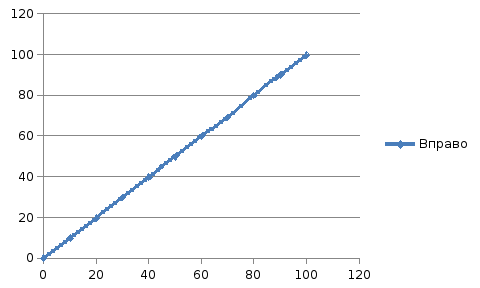
Рисунок 1 – зависимость LДАТ =f(LОБР) при перемещении образцового измерителя вправо
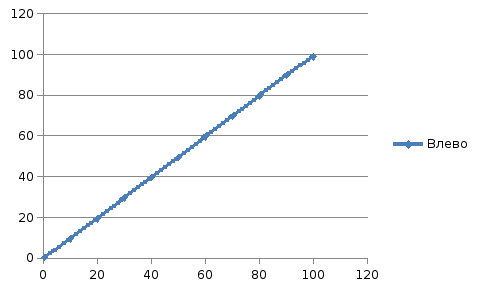
Рисунок 2 – зависимость LДАТ =f(LОБР) при перемещении образцового измерителя влево
Дальше строятся зависимости δL = f(LДАТ), изображенные на рисунке 3 и 4.

Рисунок 3 – зависимость δL = f(LДАТ) при перемещении образцового измерителя вправо

Рисунок 4 – зависимость δL = f(LДАТ) при перемещении образцового измерителя влево
По графикам на рисунке 3 и 4 можно сделать вывод, что погрешность отрицательная, так как показания датчика меньше показаний образцового переключателя.
2.2. Определение коэффициента пересчета количества импульсов в миллиметрах для оптического датчика.
Перемещая вправо образцовый измеритель на отметку 70 мм, не превышая скорости перемещения 50 мм/сек, используя колесико точного перемещения, подводится образцовый измеритель к показанию 50 мм. Результат получился на 50 мм 1999 импульсов. Далее рассчитывается коэффициент пересчета импульсов энкодера в миллиметры для оптического датчика по формуле (1):
 (1)
(1)
Затем перемещается образцовый измеритель на 30 мм, количество импульсов на нем 1305. Далее пересчитывается количество импульсов в миллиметрах для 30 мм по формуле (2):
 (2)
(2)
Данный метод перевода по формуле довольно точный.
2.3. Определение систематической погрешности оптического инкрементального датчика при многократной смене направления движения датчика влево/вправо.
Перемещая вправо образцовый измеритель на отметку 200 мм, не превышая скорости перемещения 50 мм/сек, используя колесико точного перемещения, подводится образцовый измеритель к показанию 200 мм. Затем перемещается образцовый измеритель влево до отметки 0 мм. Результаты в таблице 3.
Таблица 3
|
|
|
|
-8 |
199,9 |
|
-17 |
199,9 |
|
-19 |
199,9 |
|
-12 |
199,9 |
|
11 |
199,9 |
|
20,2 |
199,9 |
|
20,4 |
199,9 |
|
23,4 |
199,9 |
|
22,6 |
199,9 |
|
28,1 |
199,9 |
|
31,3 |
199,9 |


После этого нашли систематические погрешности для точки 0 и 200.


2.4 Снятие экспериментальной характеристики зависимости показаний квадратурного энкодера PF1 в миллиметрах от фактического положения магнитного датчика.
Производятся действия, что и в пункте 2.1. Результаты заносятся в таблицы 4 и 5.
Таблица 4
|
№ |
Показания образцового датчика LОБР, мм |
Показания оптического датчика LДАТ, мм |
Абсолютная погрешность ΔL, мм |
Относительная погрешность на текущем расстоянии δL, мм |
|
0 |
0 |
0 |
0 |
- |
|
1 |
10,03 |
9 |
-1,03 |
-11,4444 |
|
2 |
20,03 |
19 |
-1,03 |
-5,42105 |
|
3 |
30,01 |
29 |
-1,01 |
-3,48276 |
|
4 |
40,03 |
38 |
-2,03 |
-5,34211 |
|
5 |
50,01 |
48 |
-2,01 |
-4,1875 |
|
6 |
60,01 |
58 |
-2,01 |
-3,46552 |
|
7 |
70,01 |
67 |
-3,01 |
-4,49254 |
|
8 |
80,01 |
76 |
-4,01 |
-5,27632 |
|
9 |
90,01 |
86 |
-4,01 |
-4,66279 |
|
10 |
100,02 |
96 |
-4,02 |
-4,1875 |
Таблица 5
|
№ |
Показания образцового датчика LОБР, мм |
Показания оптического датчика LДАТ, мм |
Абсолютная погрешность ΔL, мм |
Относительная погрешность на текущем расстоянии δL, мм |
|
0 |
100,02 |
96 |
-4,02 |
-4,1875 |
|
1 |
90,03 |
86 |
-4,03 |
-4,68605 |
|
2 |
80,06 |
76 |
-4,06 |
-5,34211 |
Окончание таблицы 5
|
№ |
Показания образцового датчика LОБР, мм |
Показания оптического датчика LДАТ, мм |
Абсолютная погрешность ΔL, мм |
Относительная погрешность на текущем расстоянии δL, мм |
|
3 |
70,03 |
69 |
-1,03 |
-1,49275 |
|
4 |
60,06 |
61 |
0,94 |
1,540984 |
|
5 |
50,06 |
51 |
0,94 |
1,843137 |
|
6 |
40 |
42 |
2 |
4,761905 |
|
7 |
30,06 |
32 |
1,94 |
6,0625 |
|
8 |
20,08 |
23 |
2,92 |
12,69565 |
|
9 |
10,04 |
13 |
2,96 |
22,76923 |
|
10 |
0 |
0,9 |
0,9 |
- |
Построили зависимости LДАТ =f(LОБР), изображенные на рисунке 5 и 6.

Рисунок 5 – зависимость LДАТ =f(LОБР) при перемещении образцового измерителя вправо
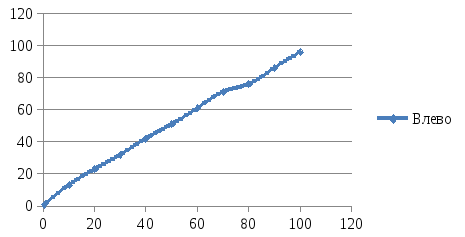
Рисунок 6 – зависимость LДАТ =f(LОБР) при перемещении образцового измерителя влево
Построили зависимости δL = f(LДАТ), изображенные на рисунке 7 и 8.
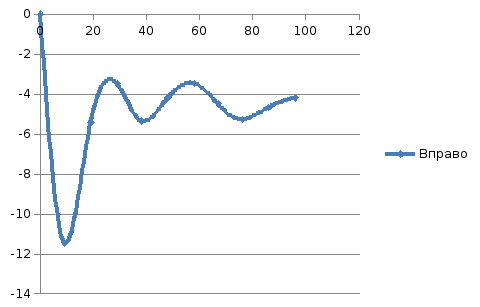
Рисунок 7 – зависимость δL = f(LДАТ) при перемещении образцового измерителя вправо
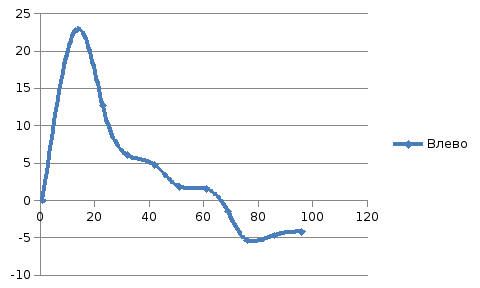
Рисунок 8 – зависимость δL = f(LДАТ) при перемещении образцового измерителя влево
2.5. Определение коэффициента пересчета количества импульсов в миллиметры для магнитного датчика.
Перемещается вправо образцовый измеритель на отметку 200 мм, не превышая скорости перемещения 100 мм/сек, используя колесико точного перемещения, подводится образцовый измеритель к показанию 200 мм. Результат получился на 200 мм 200 импульсов. Далее рассчитывается коэффициент пересчета импульсов энкодера в миллиметры для оптического датчика по формуле (3):
 (3)
(3)
Затем перемещается образцовый измеритель на 100 мм, количество импульсов на нем 106. Далее пересчитывается количество импульсов в миллиметрах для 100 мм по формуле (2):
 (4)
(4)
2.6. Определение систематической погрешности магнитного инкрементального датчика при многократной смене направления движения датчика влево/вправо.
Перемещая вправо образцовый измеритель на отметку 200 мм, не превышая скорости перемещения 50 мм/сек, используя колесико точного перемещения, подводится образцовый носитель к показанию 200 мм. Затем перемещается образцовый измеритель влево до отметки 0 мм. Результаты в таблице 5.
Таблица 5
|
|
|
|
-5 |
19,6 |
|
4 |
19,7 |
|
6 |
20,2 |
|
69 |
20,8 |
|
74 |
27,9 |
|
74 |
28,0 |
|
116 |
28,0 |
|
185 |
31,4 |
|
200 |
35,9 |
|
200 |
40,5 |


После этого находятся систематические погрешности для точки 0 и 200.


2.7. Сравнение точностных параметров двух типов датчиков оптического и магнитного.
Строятся зависимости δL = f(LДАТ) магнитного и оптического датчика (рисунок 9 и 10) на одном графике и сравнивается их точность.

Рисунок 9 – Зависимость δL = f(LДАТ) для оптического и магнитного при движении вправо
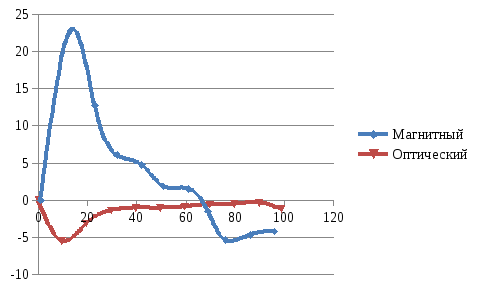
Рисунок 10 – Зависимость δL = f(LДАТ) для оптического и магнитного при движении влево
При измерении малых расстояний лучше брать оптический датчик, чем магнитный, так как точность измерений по графикам у оптического выше, чем у магнитного.
Дальше сравнивается коэффициент k для магнитного и оптического датчика 1>0,0025. Коэффициент магнитного больше коэффициента оптического датчика, следовательно его лучше использовать для измерений.