

Лебедка с ручным приводом:
1 - барабана; 2 - ограждающий лист; 3 - зубчатое колесо;
4 -рукоятка; 5 - грузоупорный тормоз.
Между крутящими моментами на приводном валу Мпр и валу барабана Мб имеется зависимость:
i = Мб/Мпр*η
где i- передаточное число;
η- к.п.д передачи.
В характеристиках лебедок с многослойной навивкой скорость каната указывается для первого слоя. На каждом последующем слое скорость больше. Возрастание скорости происходит скачкообразно, что приводит в период подъема к такому же изменению вращающего момента и мощности двигателя.
Число оборотов барабана (по первому слою навивки):
n=60*ύ/π(Dб-dк)
где ύ- скорость каната в м\с;
Dб- диаметр барабана в м;
Dк- диаметр каната в м.
Диаметр окружности последнего слоя навивки:
Dz = Dб+2*dn*z-dк
где z- число слоев навивки каната на барабан.
Скорость каната на последнем слое навивки:
ύz = π*Dz*n/60
Мощность двигателя лебедки определяется по формуле:
N = P*ύz/102*η
где Р- тяговое усилие лебедки в кг; ύz- скорость каната на последнем слое навивки в м/с;
η- коэффициент полезного действия лебедки.
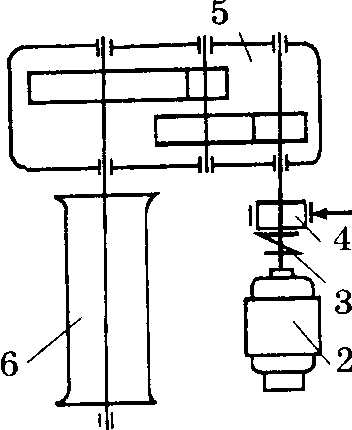
Кинематическая схема электорореверссивной лебедки:
1 - рама 2 - электродвигатель 3 - муфта 4 - тормоз 5 - редуктор 6 – барабан.
Домкраты
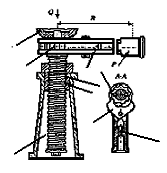
Винтовые домкраты: 1 - литой или сварной корпус;2 - стальной винт;
3 – оголовок; 4 – трещотка; 5 – гайка; 6 – рукоятка; 7 - двусторонняя собачка;
8 – пружина; 9 - храповое колесо.
Усилие, необходимое для вращения винта домкрата, нагруженного грузом Q, равно:
при подъеме
Pп = Q*r/k*tg*(ρ+α)
при спуске
Pсп = Q*r/l*ng*(ρ-α)
где Q- вес поднимаемого груза;
r- средний радиус нарезки винта, мм;
l- длина рукоятки, к которой приложено усилие, мм;
ρ- угол трения в резьбе;
α- угол подъема винтовой линии, град.
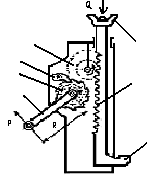
Реечные домкраты:
1 – корпус; 2 – рейка; 3 – оголовок; 4 – лапа; 5- рукоятка;
6 – собачка; 7 - храповое колесо.
Усилие на рукоятке с плечом l в мм, необходимое для перемещения рейки, нагруженной силой Q (вес груза) определяется по формуле:
P = Q*d3/2i*l*1/η
где d3- диаметр шестерни, передающей усилие на рейку, мм;
i- передаточное число зубчатой передачи; η-к.п.д. передачи.
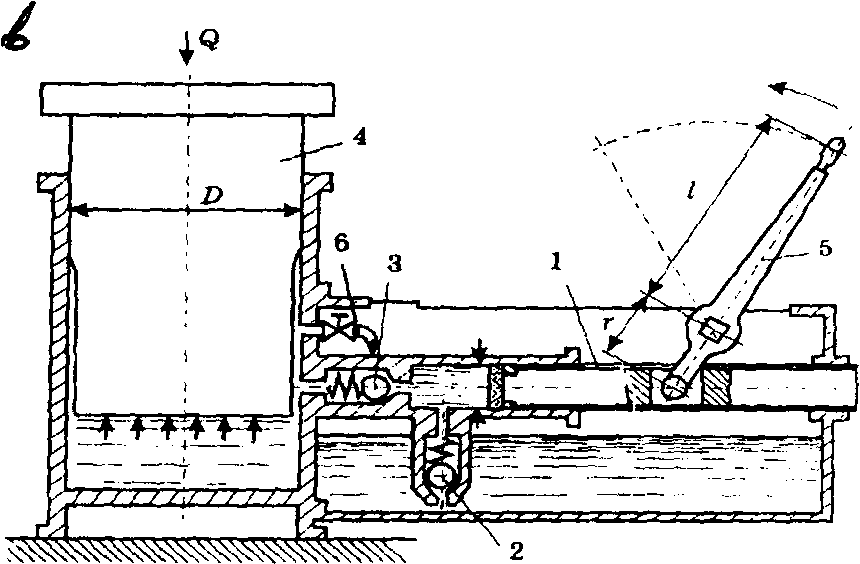
Гидравлические домкраты:
1 - цилиндр домкрата; 2,7 - клапанные устройства; 3 - плунжерный насос;
4,8 – поршень; 5 – рукоятка; 6 - насосное отделение; 9 - отверстие.
Подъемная сила гидравлического домкрата:
Q = P*L/l*D2/d2*η
где P- усилие рабочего на рукоятке, кгс; L- длина рукоятки, см; l- плечо толкателя плунжера, см;
D- диаметр поршня домкрата, см; d-диаметр поршня плунжерного насоса, см;
η-к.п.д., составляющий 0,8-0,9.
Тали
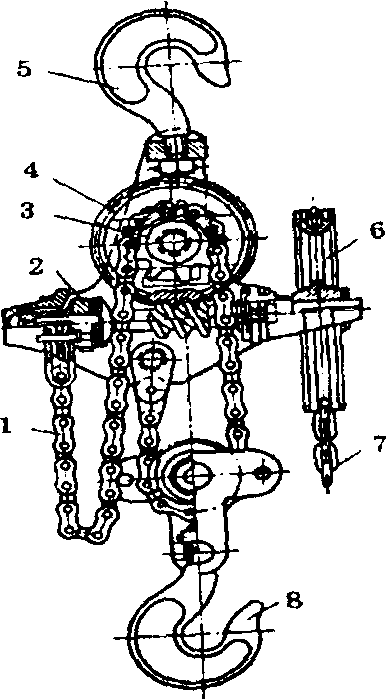
Ручная таль:
1 - цепь подъема груза; 2 - тормозное устройство;
3 - звездочка; 4 – червячное колесо; 5 – крюк; 6 - приводное колесо;
7 - цепь привода тали; 8 - грузовой крюк.
Ручные тали выпускаются грузоподъемностью до 5 m, коэффициент полезного действия их 0,7 – 0,8.
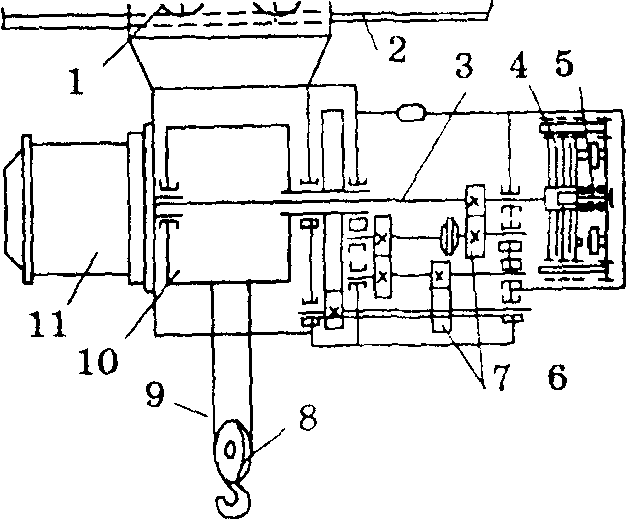
Электротельфер:
1 – каретка; 2 – монорельс; 3 – вал; 4 – дисковой тормоз;
5 – пружина; 6 – электромагнит; 7 – редуктор; 8 – крюковая обойма;
9 – канат; 10 – барабан; 11 – электродвигатель.
Тельфер грузоподъемностью до 0,5 m передвигается по рельсу вручную; грузоподъемностью от 1 до 3 m – на четырехколесной ходовой тележке с помощью двигателя. Тельфер грузоподъемностью 5 m передвигается на двух ходовых тележках, из которых одна приводная. Основные показатели электротельферов следующие: грузоподъемность 0,25- 5 m; высота подъема груза 6 – 18 м, а иногда и более, скорости подъема груза 0,13 и передвижения 0,5 м/с.На тельферах применяются двигатели переменного тока. Ток к ним подводится контактными проводами или гибким кабелем.