

2.3. Программирование одноинструментальной обработки
Инструментальная револьверная головка станка модели 16К20Т1.02 может занимать шесть позиций (номера позиций выбиты на торце головки). Поворот головки для установки необходимого инструмента в рабочую позицию осуществляется по команде функции Т с однозначным числом. Например, Т1, Т3, Т6.
Линейные перемещения программируют, как правило, в абсолютной системе, т.е. указывают координаты конечной точки участка траектории относительно нулевой точки детали с учетом дискретности 0,01. Например, обработка шейки пальца (рис. 3) диаметром 40 мм обеспечивается перемещением резца по оси Z из точки 1 в точку 2 с координатами X = 40 мм (на диаметр), Z = - 50 мм. В управляющей программе это перемещение записывается кадром:
N7 Z-5000.

Рис. 3. Схема обработки детали палец
Знак направления движения + не указывается, так как воспринимается по умолчанию. Перемещение будет осуществляться только при условии, что в одном из предыдущих кадров задана подача F (N4 F25).
Перемещение
на ускоренной подаче задают символом
![]() (клавиша 21, см. рис. 1), который обычно
располагают в конце кадра.
(клавиша 21, см. рис. 1), который обычно
располагают в конце кадра.
Одновременное движение по двум координатам задают двумя кадрами. В конце первого кадра ставят «звездочку» (*). Этому символу соответствует клавиша 35 на пульте управления (см. рис. 1).
При быстром подходе к точке рекомендуется вначале задавать координаты Z, а затем – X. При отходе – наоборот.
Запись управляющей программы в абсолютной системе отсчета для однопроходного обтачивания детали палец (см. рис. 3) при подаче – 0,25 мм/об, числе оборотов шпинделя – 600 об/мин и координатах исходной точки (И.Т.) X = 90 мм, Z = 50 мм имеет следующий вид:
|
N0 М40 |
Третий диапазон частоты вращения шпинделя. |
|
N1 МЗ |
Левое вращение шпинделя. |
|
N2 S600 |
Частота вращения шпинделя n = 600 об/мин. |
|
N3 F25 |
Подача s = 0,25 мм/об. |
|
N4
Х9000 |
Подвод инструмента в точку исходного положения И.Т. ускоренно, одновременно по осям X и Z. |
|
N5
Z5000 | |
|
N6 T1 |
Поворот револьверной головки в позицию Т1. |
|
N7
Х4000 |
Подвод инструмента к заготовке ускоренно, одновременно по осям X и Z. |
|
N8
Z200 | |
|
N9 Z-5000 |
Обтачивание Ø 40 мм на длину 50 мм. |
|
N10 Х5400 |
Отвод на Ø 54 мм с подрезанием уступа. |
|
N11
Х9000 |
Отвод инструмента в точку И.Т. ускоренно, одновременно по осям X и Z. |
|
N12
Z5000 | |
|
N13 М5 |
Останов шпинделя. |
|
N14 M30 |
Конец программы. |
Для программирования обработки деталей с последовательной простановкой размеров более рационально использовать относительную систему отсчета, при которой указываются не координаты конечных точек перемещения, а расстояние между точками начала и конца каждого участка движения.
Сразу
после номера кадра или после геометрической
информации (т.е. данных об отрезке
траектории) при программировании в
относительной системе отсчета указывается
символ
![]() ,
которому соответствует клавиша 20 на
пульте управления с таким же символом
(см. рис. 1).
,
которому соответствует клавиша 20 на
пульте управления с таким же символом
(см. рис. 1).
Запись управляющей программы в относительной системе отсчета для обработки пальца (см. рис. 3) проходным упорным резцом, установленным в позиции револьверной головки Т1, имеет следующий вид:
|
N0 М40 |
Третий диапазон частоты вращения шпинделя. |
|
N1 МЗ |
Левое вращение шпинделя. |
|
N2 S600 |
Частота вращения шпинделя n = 600 об/мин. |
|
N3 F25 |
Подача s = 0,25 мм/об. |
|
N4
Х9000 |
Подвод резца в И.Т. ускоренно, одновременно по осям X и Z (в абсолютной системе отсчета). |
|
N5
Z5000 | |
|
N6 T1 |
Поворот револьверной головки в позицию Т1. |
|
N7
X-5000
|
Подвод инструмента к заготовке ускоренно, одновременно по осям X и Z. |
|
N8
Z-4800
| |
|
N9
Z-5200
|
Обтачивание Ø 40 мм на длину 50 мм. |
|
N10
X1400
|
Отвод на Ø 64 мм с подрезанием уступа. |
|
N11
Х3600
|
Отвод инструмента в точку И.Т. ускоренно, одновременно по осям X и Z. |
|
N12
Z10000
| |
|
N13 М5 |
Останов шпинделя. |
|
N14 M30 |
Конец программы. |
Для составления управляющей программы обработки ступенчатого валика из заготовки диаметром 104 мм, длиной 140 мм (рис. 4, а) в абсолютной системе отсчета принимают координаты исходной точки (И.Т.) X = 150 мм, Z = 50 мм, т.е. точка И.Т. удалена на 23 мм от наружной поверхности заготовки и на 50 мм от ее торца. Это обеспечивает безопасность оператора при смене заготовки и не мешает повороту диска револьверной головки при смене инструмента.
Траектория перемещения вершины упорного проходного резца, установленного в позиции револьверной головки Т3, представлена на рис. 4, б. Обработка выполняется за три прохода, на каждом из которых припуск срезается по схеме «петля», а режимы резания составляют: частота вращения шпинделя n = 600 об/мин, подача s = 0,3 мм/об.
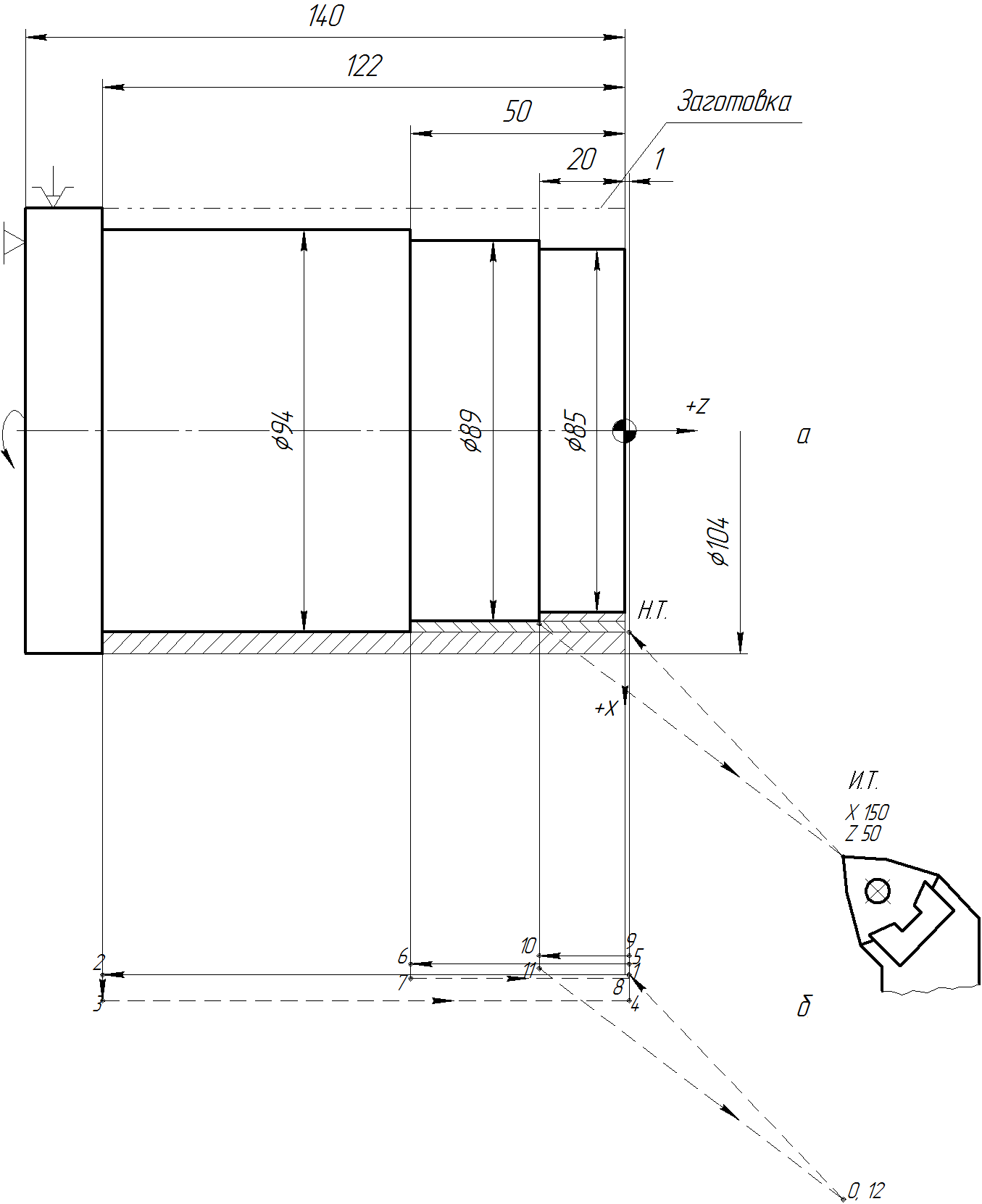
Рис. 4. Схема обработки ступенчатого валика (а)
и траектория перемещения резца (б)
Управляющая программа для обработки ступенчатого валика в абсолютной системе отсчета имеет вид:
|
N0 М40 |
Третий диапазон частоты вращения шпинделя. |
|
N1 МЗ |
Прямое направление вращения шпинделя. |
|
N2 S600 |
Частота вращения шпинделя n = 600 об/мин. |
|
N3 F30 |
Подача s = 0,3 мм/об. |
|
N4
Х15000
|
Подвод резца в И.Т. ускоренно, одновременно по осям X и Z. |
|
N5
Z5000
| |
|
N6 Т3 |
Поворот револьверной головки в позицию Т3. |
|
N5
Z100
|
Подвод резца ускоренно, одновременно по осям X и Z в начальную точку рабочей траектории. |
|
N6
X9400
| |
|
N7 Z-12200 |
Перемещение на рабочей подаче по оси Z (обтачивание третьей ступени вала 94 мм). |
|
N8 X10500 |
Отвод резца на рабочей подаче от заготовки по оси X до 105 мм (доработка уступа). |
|
N9
Z100
|
Отвод резца по оси Z ускоренно на 1 мм от торца заготовки. |
|
N10
Х8900
|
Подвод до 89 мм для обработки второй ступени вала. |
|
N11 Z-5000 |
Перемещение на рабочей подаче по оси Z (обтачивание второй ступени вала 89 мм). |
|
N12 Х9500 |
Отвод на рабочей подаче от заготовки по оси X до 95 мм. |
|
N13
Z100
|
Отвод резца по оси Z ускоренно на 1 мм от торца заготовки. |
|
N14
X8500
|
Подвод до 85 мм для обработки первой ступени вала. |
|
N15 Z-2000 |
Перемещение на рабочей подаче по оси Z (обтачивание первой ступени вала 85 мм). |
|
N16 X9000 |
Отвод на рабочей подаче от заготовки по оси X до 90 мм. |
|
N17
X15000
|
Отвод резца в исходную точку ускоренно, одновременно по осям X и Z. |
|
N18
Z19000
| |
|
N19 М5 |
Останов шпинделя. |
|
N20 М30 |
Конец программы. |