

Построение рабочей зоны манипулятора В10
.docxМинистерство образования и науки Российской Федерации
ФГБОУ ВПО «Омский государственный технический университет»
Кафедра «Автоматизация и робототехника»
Домашняя работа
по дисциплине “ Конструирование мехатронных модулей”
Тема: «Построение рабочей зоны манипулятора»
Вариант 10
Проверил: доцент, к.т.н.
___________ В. Г. Мальцев
“___”__________2012 г.
Разработал: ст. гр. БМТ-419
____________ Д. В. Дьяконов
“___”__________2012 г.
Омск 2012
Оглавление
Введение 3
1.Исходные данные 3
2.Решение прямой и обратной задачи кинематики 4
3.Построение рабочей зоны манипулятора 4
Заключение 7
Введение
Целью данной работы является изучение работы манипулятора путем расчета прямой и обратной задачи кинематики по заданным значениям, а также построения рабочей зоны манипулятора.
-
Исходные данные
Исходные данные для расчета прямой и обратной задачи кинематики:
H=800 мм;
a=400 мм;
L1=800 мм;
L2 =500 мм.
Кинематическая схема манипулятора представлена на рисунке 1.
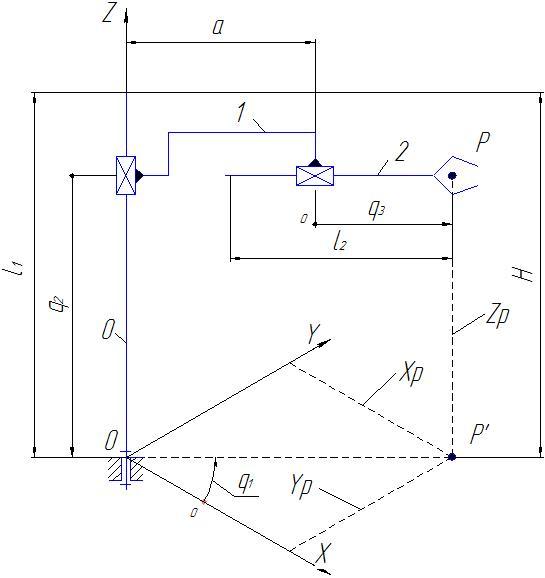
Рис. 1. Кинематическая схема манипулятора
Таблица 1. Данные, необходимые для построения рабочей зоны
|
Обобщенные координаты. |
Диапазон значений |
|
q1, град |
0..270 |
|
q2, мм |
350..600 |
|
q3, мм |
150..400 |
-
Решение прямой и обратной задачи кинематики
В робототехнике, есть две основные задачи кинематики: прямая и обратная.
Прямая задача — это вычисление положения (Xp, Yp, Zp) рабочего органа манипулятора по его кинематической схеме и значениях обобщенных координат (q1, q2… qn) , где n — число степеней свободы манипулятора, q — обобщенные координаты.
Обратная задача — это вычисление величин обобщенных координат (q1, q2…qn) по заданному положению (Xp, Yp, Zp) рабочего органа при известной схеме кинематики манипулятора.
Таким образом, решение прямой задачи говорит о том, где будет находиться рабочий орган манипулятора, при заданных углах его суставов, а обратная задача — как нужно «вывернуться» манипулятору, чтобы его рабочий орган оказался в заданном положении.
Прямую и обратную задачи кинематики манипулятора будем решать геометрически. Кинематическая схема манипулятора, обобщенные координаты его звеньев qn, их длины ln изображены на рисунке 1.
Прямая задача. По заданным обобщенным координатам найти положение точки P схвата.
 ;
;
 ;
;
 .
.
Обратная задача. По заданному положению точки P схвата найти обобщенные координаты.
 );
);
 ;
;
 .
.
-
Построение рабочей зоны манипулятора
Рабочее пространство промышленного робота — пространство, в котором может находиться мехатронное устройство.
Рабочая зона мехатронного устройства — пространство, в котором может находиться рабочий орган (например, рука) при функционировании мехатронного устройства.
Для построения рабочей зоны придадим перемещения по обобщённым координатам q1, q2, q3 от крайних минимальных до крайних максимальных значений.
Если обобщённой координате q1 придать фиксированное граничное значение 0° и обобщённой координате q2 придать фиксированное граничное значение 600 мм, а обобщённую координату q3 изменять в пределах от 150 мм до 400 мм, точка P рабочего органа опишет отрезок AB длиной 250 мм.
Если обобщённой координате q1 придать фиксированное граничное значение 0° и обобщённой координате q3 придать фиксированное граничное значение 400 мм, а обобщённую координату q2 изменять в пределах от 350 мм до 600 мм, точка P рабочего органа опишет отрезок BC длиной 250 мм.
Если обобщённой координате q1 придать фиксированное граничное значение 0° и обобщённой координате q2 придать фиксированное граничное значение 350 мм, а обобщённую координату q3 изменять в пределах от 150 мм до 400 мм, точка P рабочего органа опишет отрезок CD длиной 250 мм.
Если обобщённой координате q1 придать фиксированное граничное значение 0° и обобщённой координате q3 придать фиксированное граничное значение 150 мм, а обобщённую координату q2 изменять в пределах от 350 мм до 600 мм, точка P рабочего органа опишет отрезок AD длиной 250 мм.
Если обобщённой координате q2 придать фиксированное значение 600 мм и координате q3 фиксированное значение 150 мм, а координату q1 изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 550 мм вокруг оси Z.
Если обобщённой координате q2 придать фиксированное значение 600 мм и координате q3 фиксированное значение 400 мм, а координату q1 изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 800 мм вокруг оси Z.
Если обобщённой координате q2 придать фиксированное значение 350 мм и координате q3 фиксированное значение 400 мм, а координату q1 изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 800 мм вокруг оси Z.
Если обобщённой координате q2 придать фиксированное значение 350 мм и координате q3 фиксированное значение 150 мм, а координату q1 изменять в пределах от 0° до 270°, то точка P рабочего органа опишет дугу радиусом 550 мм вокруг оси Z.
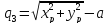
Полученная фигура имеет сложную форму. Рабочая зона манипулятора ограничивается большим и малым цилиндрами радиусами 550 мм и 800 мм, двумя параллельными плоскостями, отстающими от плоскости XY на 550 мм и 800 мм и сектором в 270°.
Рис.2 Рабочая зона манипулятора
Заключение
В ходе данной работы был произведен анализ манипуляторной системы, работающей в цилиндрической системе координат, которая характеризуется 2-мя поступательными и 1-ой вращательной кинематическими парами. Также была построена и описана рабочая зона манипулятора. Решены прямая и обратная задача кинематики