

Контрольная работа
.pdf3.7 |Ф(w)| амплитудно-частотной характеристики (АЧХ) замкнутой системы:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ф (w) |
= Ф |
вещ |
(w)2 |
+ Ф |
мним |
(w)2 |
|
|
|
|
|
|
|
||
мод |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||||||||
|
|
K K K |
éK K K + 1 − (T T + T T + T T ) |
w2ù2 |
+ é(T + T + T ) w − T T T w3ù2 |
||||||||||
Фмод(w) |
= |
1 2 3 |
ë 1 2 3 |
1 2 1 3 2 3 |
û |
ë |
1 2 3 |
1 2 3 |
û |
|
|||||
|
|
|
|
|
|
|
A6 w6 + A4 w4 + A2 w2 + A0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
упростим выражение для числителя:
B6 = T12 T22 T32
B4 = (T1 T2 + T1 T3 + T2 T3)2 − 2 T1 T2 T3 (T1 + T2 + T3)
B2 = (T1 + T2 + T3)2 − 2 (K1 K2 K3 + 1) (T1 T2 + T1 T3 + T2 T3)
B0 = (K1 K2 K3 + 1)2
K1 K2 K3 B6 w6 + B4 w4 + B2 w2 + B0 Фмод(w) = A6 w6 + A4 w4 + A2 w2 + A0
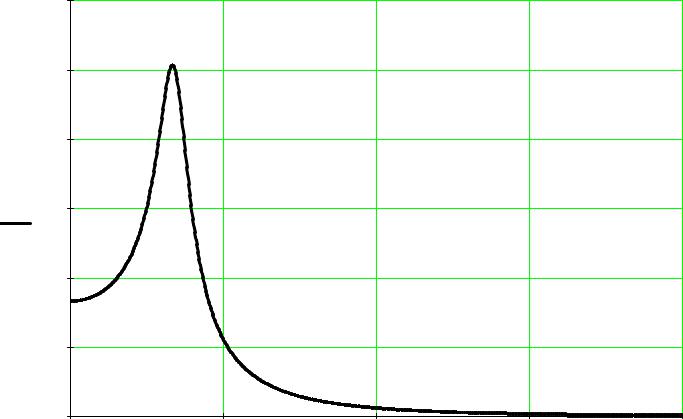
Построим график амплитудно-частотной характеристики (АЧХ) замкнутой системы на интервале 0...10 рад/с (из соображений наглядности графика), по вертикальной оси будем откладывать амплитуду, а по горизонтальной оси - частоту:
3.5
3
2.5
2
Фмод(w)
1.5
1
0.5
0 |
2 |
4 |
6 |
8 |
10 |
w рад/с
4. Используя полученные характеристики и построенные графики, найдем и оценим |
|
||||||
следующие показатели качества системы: |
|
||||||
4.1 ест - статическую ошибку при подаче на вход единичного ступенчатого |
|
||||||
воздействия: |
|
|
|
|
|||
eст = |
|
|
1 |
= |
1 |
= 0.167 |
|
1 |
+ K1 K2 |
1 + 2.5 0.525 3.8 |
|
||||
|
K3 |
|
|
||||
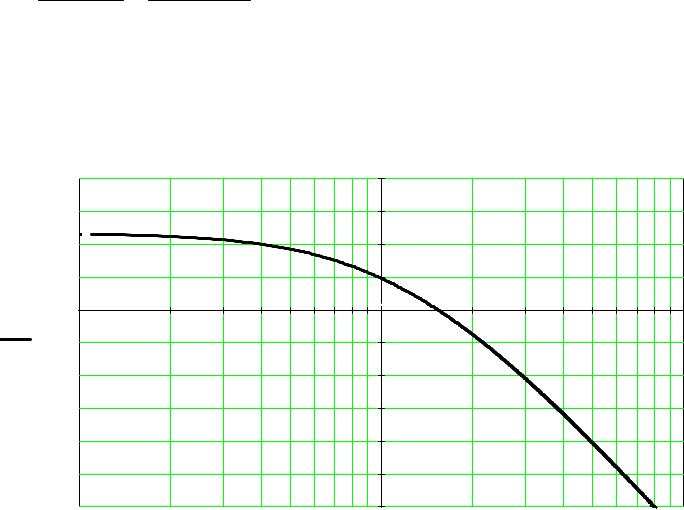
4.2 wc - частоту среза системы , запасы устойчивости системы по амплитуде Lзап и |
|
||||||
фазе фзап: |
|
|
|
|
|
||
частота среза системы определяется по графику ЛАЧХ как частота, на которой |
|
||||||
коэффициент усиления равен 0 дБ (корень уравнения L(w)=0): |
|
||||||
|
|
|
|
|
|
24 |
|
|
|
|
|
|
|
18 |
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
6 |
|
ЛАЧХ(w) |
0.1 |
|
|
1 |
10 |
||
|
|
|
− 6 |
|
|||
дБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 12 |
|
|
|
|
|
|
|
− 18 |
|
|
|
|
|
|
|
− 24 |
|
|
|
|
|
|
|
− 30 |
|
|
|
|
|
|
|
− 36 |
|
|
|
|
|
|
|
w,рад/с |
|
wc = 1.53 рад/с |
|
|
|
|
|||

запас устойчивости системы по фазе фзап показывает, на какое значение ФЧХ |
|
||||
разомкнутой системы на частоте среза отличается от п (180 град): |
|
||||
|
0.1 |
|
|
1 |
10 |
|
|
|
|
− 60 |
|
|
|
|
|
− 120 |
|
ф(w) |
|
|
|
− 180 |
|
град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− 240 |
|
|
|
|
|
− 300 |
|
|
|
|
|
− 360 |
|
|
|
|
|
w, рад/с |
|
фзап |
= 180 − |
ф(wc) |
= 180 − −154.715 |
= 25.285 град |
|
критическая частота определяется из графика ФЧХ как частота, на которой фаза разомкнутой системы равна п (180 град):
wкр = 2.157 рад/с
запас устойчивости системы по амплитуде (усилению) Lзап показывает, во сколько раз нужно увеличить коэффициент усиления, чтобы система оказалась на границе
устойчивости
Lзап |
= |
1 |
= |
1 |
= 1.994 |
|
Wмод(wкр) |
0.501 |
|||||
|
|
|
|
20 log(Lзап) = 5.996 дБ
4.3 М - показатель колебательности системы:
показатель колебательности системы определяется как максимальное значение АЧХ замкнутой системы (обычно стремятся, стобы показатель колебательности не превышал двух)
M = max(Фмод(w)) = 2.535
4.4 tp - время регулирования и перерегулирование G: |
|
|
|
|
|
||||||||||||
определим переходную характеристику системы как обратное преобразование Лапласа |
|
||||||||||||||||
от: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ W |
|
(p) ö |
|
|
|
|
|
|
|
|
|
|
|
|
h(t) = |
− 1ç |
замк |
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
||
L |
è |
p |
|
ø |
|
|
|
|
|
|
|
|
|
|
|
||
h(t) |
= |
− 1é1 |
|
|
|
|
|
|
K1 K2 K3 |
|
|
|
|
ù |
|
||
L |
ê |
|
|
|
3 |
+ (T1 |
|
T3 + T2 T3) (p) |
2 |
+ (T1 |
+ T2 + T3) p + K1 K2 K3 |
|
ú |
|
|||
|
|
|
êp |
T1 T2 |
T3 (p) |
T2 + T1 |
+ |
ú |
|
||||||||
|
|
|
ë |
|
|
1û |
|
||||||||||
h(t) |
= −0.191 e− 3.41 t + −0.642 cos(1.69 t) |
e− 0.255 t + −0.481 sin(1.69 t) e− 0.255 t + 0.833 |
|
|
|
||||||||||||
определим установившееся значение на выходе системы yуст при воздействии на нее |
|
||||||||||||||||
ступенчатой функции: |
|
|
|
|
|
|
|
|
|
|
|||||||
yуст |
= |
|
lim |
h(t) |
= 0.833 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
t → oo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
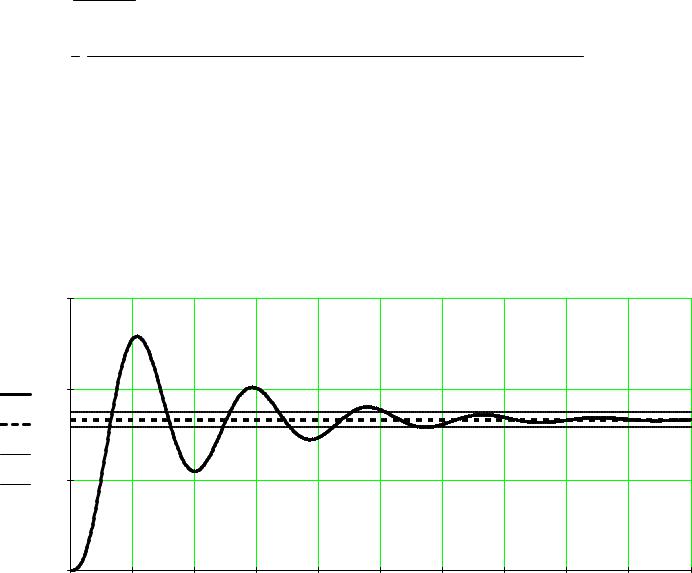
построим график переходного процесса: |
|
|
|
|
|
|
|
||||||||||
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h(t) |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yуст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.05 yуст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
0.95 yуст |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
2 |
|
4 |
6 |
8 |
|
10 |
12 |
14 |
16 |
18 |
20 |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
длительность переходного процесса определим как время, с момента подачи сигнала |
|
||||||||||||||||
до момента времени, когда выходной сигнал не будет отличаться от его |
|
|
|
||||||||||||||
установившегося значения не более чем на 5%: |
|
|
|
|
|
|
|
||||||||||
tp = 12.465 с
Определим по графику переходного процесса максимальное значение выходного сигнала:
hmax = 1.3
Определим перерегулирование:
G = |
|
hmax − yуст |
|
= |
|
1.3 − 0.833 |
|
= 56.087 % |
|
|
|
|
|||||
|
|
|
|
|
|
|||
|
yуст |
|
|
0.833 |
|
|||
|
|
|
|
|
|
|
5. Найдем дифференциальное уравнение замкнутой системы, связывающее координаты y и v (полагая f=0):
Воспользуемся передаточной функцией замкнутой системы, для этого представим ее в виде полинома, где символ s эквивалентен операции дифференцирования:
Ф(s) = |
|
|
|
|
|
K1 K2 K3 |
|||
|
T1 T2 T3 s3 + (T1 T2 + T1 T3 + T2 T3) s2 + (T1 + T2 + T3) s + K1 K2 K3 + 1 |
||||||||
|
|
|
|
|
|||||
a3 |
= T1 T2 T3 = 0.5 1.5 0.8 = 0.6 |
||||||||
a2 |
= T1 T2 + T1 T3 + T2 T3 = 0.5 1.5 + 0.5 0.8 + 1.5 0.8 = 2.35 |
||||||||
a1 |
= T1 + T2 + T3 = 0.5 + 1.5 + 0.8 = 2.8 |
||||||||
a0 |
= K1 K2 K3 + 1 = 2.5 0.525 3.8 + 1 = 5.983 |
||||||||
K = K1 K2 K3 = 2.5 0.525 3.8 = 4.983 |
|||||||||
Ф(s) = |
|
|
|
|
K |
|
|||
|
a3 s3 + a2 s2 + a1 s + a0 |
||||||||
|
|
|
|
|
|||||
æa s3 + a s2 |
+ a s + a ö y = K v |
||||||||
è 3 |
|
|
2 |
1 |
0ø |
|
|||
a |
|
d3 |
|
y + a |
d2 |
y + a d y + y = K v |
|||
|
dt3 |
|
|||||||
3 |
|
2 |
dt2 |
1 dt |
|||||

6. Найдем уравнение состояния замкнутой системы в векторно-матричном виде, в нормальной форме, связывающее координаты y и v (полагая f=0):
6.1 Найдем уравнение состояния замкнутой системы в векторно-матричном виде, связывающее координаты y и v (полагая f=0):
v+ |
|
y(3) |
1 |
y(2) |
2 |
y(1) |
3 |
y |
|
|
. |
K |
. |
K |
. |
K |
|
|
|
T1s+1 |
T2s+1 |
T3s+1 |
x1 |
|||
|
- |
x3 |
|
x3=x2 |
|
x2=x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
æ |
|
|
|
1 |
|
|
|
K3 |
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ç |
− |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
÷ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
T3 |
|
|
|
T3 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
ç |
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
æ 0 |
ö |
|
|
|
|
|
|||||||
|
|
|
|
ç |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
÷ |
|
|
æ |
1 |
ö |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
ç |
÷ |
|
|
|
||||||||
d X = |
ç |
|
|
|
0 − |
|
|
|
|
2 |
|
÷ |
X + ç 0 |
÷ V |
|
Y = ç |
0 |
÷ |
X |
|||||||||||||
|
|
|
T2 |
|
|
T2 |
|
|
||||||||||||||||||||||||
dt |
|
ç |
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
ç |
÷ |
|
ç ÷ |
|
|||||||||||
|
|
|
|
ç |
|
|
|
K1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
è K1 |
ø |
|
è |
0 |
ø |
|
||
|
|
|
|
ç |
− |
0 |
|
|
|
− |
|
1 |
|
÷ |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
ç |
|
|
|
|
|
|
|
÷ |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
T |
|
T |
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
è |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
ø |
|
|
|
|
|
|
|
|
|||
æ |
|
|
1 |
|
|
K3 |
|
|
|
|
|
|
|
ö |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ç |
− |
|
|
|
|
|
|
|
|
0 |
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T3 |
|
|
T3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ç |
|
|
|
|
|
|
|
|
|
|
|
÷ |
|
|
|
æ |
−1.25 |
|
|
0 ö |
|
|
|
|||||||||
ç |
|
|
|
|
|
|
|
1 |
|
|
|
K2 |
|
÷ |
|
|
|
4.75 |
|
|
|
|||||||||||
ç |
|
|
0 |
|
− |
|
|
|
|
÷ |
= |
ç |
|
0 |
−0.667 |
0.35 |
÷ |
|
|
|
||||||||||||
ç |
|
|
|
|
T |
|
T |
÷ |
ç |
|
÷ |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
−5 |
|
|
|
|
|
|
||||||||||||||
ç |
|
|
K1 |
|
|
|
|
2 |
|
2 |
|
|
÷ |
|
|
|
è |
|
0 |
|
−2 ø |
|
|
|
||||||||
ç |
|
|
|
|
|
|
|
|
|
1 |
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ç |
− |
|
|
|
|
|
0 |
|
|
− |
|
|
÷ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
T |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
è |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
ø |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
6.2 Найдем уравнение состояния замкнутой системы в нормальной форме, связывающее координаты y и v (полагая f=0):
vK1K2K3 T1T2T3
+ |
|
y (3) |
y (2) |
y (1) |
y |
|
. |
. |
. |
|
|
|
|
x1 |
|||
|
- |
x3 |
x3=x2 |
x2=x1 |
|
|
|
T1T2+T1T3+T2T3 |
|
|
|
|
|
|
|
|
|
|
|
|
T1T2T3 |
T1+T2+T3 |
|
|
|
|
|
|
|
|
|
|
|
T1T2T3 |
|
|
|
|
|
|
K1K2K3+1 |
|
|
|
|
|
T1T2T3 |
|
|
æ |
|
|
|
0 |
|
|
|
ç |
|
|
|
0 |
|
d |
X = |
ç |
|
|
|
|
|
|
K |
K |
|
K + 1 |
|||
dt |
ç |
|
2 |
||||
|
ç |
− |
1 |
|
3 |
||
|
|
T1 T2 T3 |
|||||
|
|
è |
|
||||
1
0
− T1 + T2 + T3
T1 T2 T3
|
|
|
0 |
|
|
|
ö |
|
|
|
|
1 |
|
|
|
÷ |
|
|
|
|
|
|
|
÷ |
X + |
|
|
T T + T |
|
T + T T |
|||||
|
1 |
÷ |
||||||
− |
1 |
2 |
3 |
2 |
3 |
÷ |
|
|
|
T1 T2 T3 |
|
|
|
||||
|
|
|
|
ø |
|
|||
æ |
|
0 |
|
ö |
|
æ 1 |
ö |
|
ç |
|
0 |
|
÷ |
|
|
||
ç |
|
|
÷ |
V |
Y = ç 0 |
÷ |
X |
|
|
|
|
||||||
ç K1 K2 K3 |
÷ |
|
ç |
÷ |
|
|||
ç |
|
|
|
÷ |
|
è 0 |
ø |
|
T |
T |
T |
|
|
||||
è |
1 |
2 |
3 |
ø |
|
|
|
|

æ |
|
|
|
|
0 |
|
|
|
ç |
|
|
|
|
0 |
|
|
|
ç |
|
|
|
|
|
|
|
|
|
|
K |
K |
K |
|
+ 1 |
||
ç |
|
|
|
|||||
ç |
− |
|
1 2 3 |
|
||||
|
T1 T2 T3 |
|||||||
è |
|
|
|
|||||
æ |
|
|
|
0 |
|
|
ö |
|
ç |
|
|
|
0 |
|
|
÷ |
|
ç |
|
|
|
|
|
÷ |
= |
|
|
K1 K2 K3 |
|||||||
ç |
|
÷ |
|
|||||
ç |
|
|
|
|
|
÷ |
|
|
|
T |
T |
T |
|
||||
è |
1 |
2 |
3 |
|
ø |
|
||
1
0
− T1 + T2 + T3
T1 T2 T3
æ |
0 |
ö |
ç |
0 |
÷ |
ç |
÷ |
è 8.31 ø
|
|
0 |
|
|
ö |
|
æ |
|
|
|
ö |
|
|
1 |
|
|
÷ |
|
0 |
1 |
0 |
||
|
|
|
|
÷ |
= |
ç |
0 |
0 |
1 |
÷ |
|
|
T1 T2 + T1 T3 + T2 |
T3 |
|||||||||
|
÷ |
|
ç |
|
|
|
÷ |
||||
− |
|
|
|
|
÷ |
|
è −9.97 |
−4.67 |
−3.92 ø |
||
T1 |
T2 T3 |
|
|
|
|||||||
|
|
|
ø |
|
|
|
|
|
|
||

7. Обоснуем , при каком значении периода дискретизации рассматриваемая сис-
тема эквивалентна импульсной системе:
Рассмотрим разомкнутую импульсную систему, приведенную на передаточная функция ЭЛНЧ которой имеет вид W (s) = WФ (s)W0 (s). Передаточная функция импульс-
ной системы будет W (z), а частотная характеристика W ( jw). Существует связь между частотными характеристиками ЭЛНЧ W ( jw) и частотной характеристикой импульсной системы W ( jw), которая имеет вид:
W |
|
( jw) = |
1 |
∞ |
é |
ù |
, |
(1) |
|
|
|||||||
|
|
åW ë j (w+ rw0 )û |
||||||
|
|
|
T r=−∞ |
|
|
|
|
|
где, как и ранее, w0 = 2p T - частота дискретизации.
T - частота дискретизации.
Итак, характеристика W ( jw) получается суммированием смещенных относительно
друг друга вдоль оси w на частоту повторения w0 |
характеристик W ( jw) ЭЛНЧ, умно- |
|||||||
женных на 1 T . Из (1) вещественные и мнимые части частотных характеристик |
|
|||||||
Re W ( jw) = |
1 |
∞ |
|
Re W é j(w+ rw )ù , |
(2) |
|||
|
|
|
||||||
|
|
T rå=−∞ |
ë |
0 û |
|
|||
Im W ( jw) = |
1 |
∞ |
Im W é j(w+ rw )ù . |
|
||||
|
|
|||||||
|
T rå=−∞ |
|
ë |
0 û |
|
|||
Предположим, что вещественная и мнимая частотные характеристики заданы на ин- тервале частоты w от -wn до wn (wn - полоса пропускания) и вне этого интервала равны нулю, а спектральные характеристики входного сигнала V ( jw) определены на некото-
ром интервале -wc < w< wc и равны нулю вне этого интервала. |
В этом случае, если |
||||||||
w <w |
n |
< w0 |
, справедливо следующее соотношение |
|
|
||||
c |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y ( jw) = W ( jw)V ( jw) |
= |
1 W ( jw)V ( jw). |
(3) |
|||
|
|
|
|
|
|
T |
|
|
|
Итак, при выполнении условия w |
c |
< w < w0 |
импульсная система с передаточной |
||||||
|
|
|
|
|
n |
2 |
|
|
|
функцией W ( jw) преобразует входной сигнал точно так же, как некоторая непрерывная система с передаточной функцией T1 W ( jw).
Фактически сформулирован аналог известной теоремы Котельникова: если спектр частот входного воздействия ограничен и лежит в диапазоне частот -wn < w< wn , то
свойство системы с АИМ, у которой w0 > 2wn тождественны свойствам эквивалентной непрерывной системы с АФЧХ T1 W ( jw).
3
2.5
2
Фмод(w)1.5
1
0.5
0 |
2.5 |
5 |
7.5 |
10 |
w, рад/с
По графику амплитудно-частотной характеристики (АЧХ) замкнутой системы определим полосу пропускания как диапазон частот в котором Фмод(w)>0.707Фмод(0):
wп = 2.458 рад/с
тогда минимальное значение wo равно:
w0 = 2 wп = 2 2.458 = 4.916 рад/с
Определим максимальное значение периода дискретизации как:
tд = |
2 п |
= |
2 3.14 |
= 1.277 с |
|
w0 |
4.916 |
||||
|
|
|

8. Оценим влияние насыщения первого звена системы на ее процессы, для этого воспользуемся специальным программным продуктом - Matlab и его пакетом численного моделирования Simulink:
Нелинейность первого элемента системы с характеристикой типа "насыщение" имеет вид:
|
|
u(e) = (-c) if e £ -a |
|
|||
|
|
c |
e |
if |
-a < e < a |
|
|
|
a |
|
|
|
|
|
|
c |
if |
e ³ a |
|
|
|
|
|
20 |
|
|
|
|
|
|
10 |
|
|
|
u(e) |
− 20 |
− 10 |
|
0 |
10 |
20 |
|
|
|||||
|
|
− 10 |
|
|
|
|
|
|
− 20 |
|
|
|
|
|
|
|
|
e |
|
|