

3.3. Методы решения транспортной задачи
3.3.1. Метод потенциалов
Построенный одним из описанных выше методов исходный план можно довести до оптимального с помощью симплекс-метода. В силу особенностей модели транспортной задачи (ограничения имеют вид равенств, каждая неизвестная входит только в два уравнения, коэффициенты при неизвестных – единицы) процесс её решения симплекс-методом является громоздким. Поэтому для нахождения оптимального плана транспортной задачи созданы специальные методы, самым распространенным из которых считается метод потенциалов.
Рассмотрим алгоритм, реализующий этот метод.
Шаг 1.
Каждому поставщику
![]() (т.е. каждой строке) поставим в соответствие
некоторое число
(т.е. каждой строке) поставим в соответствие
некоторое число![]() ,
называемоепотенциалом
,
называемоепотенциалом
![]() ,
а каждому потребителю
,
а каждому потребителю![]() (т.е. каждому столбцу) поставим в
соответствие неизвестное число
(т.е. каждому столбцу) поставим в
соответствие неизвестное число![]() ,
называемоепотенциалом
,
называемоепотенциалом
![]() .
.
Для каждой заполненной клетки, т.е. для каждой базисной переменной, строится соотношение
![]() (3.17)
(3.17)
Полученная формула
должна содержать m
+ n
- 1 уравнений
(так как количество базисных переменных
равно m
+ n
- 1) c
m
+ n
неизвестными. Как известно, такая система
имеет множество решений, и любое из них
будет содержать искомые потенциалы.
Чтобы найти одно из решений, значения
одного потенциала в системе задается
произвольно. Обычно считают, что
![]() ,
и находят значения остальных потенциалов.
Значения потенциалов записывают справа
и снизу таблицы против соответствующих
строк и столбцов.
,
и находят значения остальных потенциалов.
Значения потенциалов записывают справа
и снизу таблицы против соответствующих
строк и столбцов.
Шаг 2. Для
каждой незаполненной клетки, т.е. для
каждой небазисной переменной,
рассчитываются так называемые косвенные
тарифы (![]() )
по формуле:
)
по формуле:
![]() (3.18)
(3.18)
Расчет косвенных тарифов проводится непосредственно по таблице, результат заносится в левый нижний угол соответствующей незаполненной клетки.
Шаг 3. Проверяем полученный план на оптимальность по критерию оптимальности плана транспортной задачи. Если для каждой незаполненной клетки выполняется условие
![]() (3.19)
(3.19)
то план является
оптимальным,
в противном случае полученный план не
оптимальный, и необходимо переходить
к новому базисному плану путем перемещения
перевозки в клетку, отвечающей условию
![]() .
Если таких клеток более одной, то
договоримся перемещать перевозку в
первую по порядку. Выбранная клетка
помечается в таблице. Переменная, стоящая
в этой клетке, вводится в базис.
.
Если таких клеток более одной, то
договоримся перемещать перевозку в
первую по порядку. Выбранная клетка
помечается в таблице. Переменная, стоящая
в этой клетке, вводится в базис.
Шаг 4. Для правильного перемещения перевозок, чтобы не нарушить ограничений, строится цикл, т.е. замкнутый путь, соединяющий выбранную незаполненную клетку с ней же самой и проходящий через заполненные клетки. Цикл строится следующим образом. Вычерчиваются все строки и столбцы, содержащие ровно одну заполненную клетку (выбранная клетка при этом считается заполненной). Все остальные заполненные клетки составляют цикл и лежат в его углах.
Замечание. После перевода незаполненной клетки в число заполненных количество заполненных клеток становится равным m + n. Для такого количества клеток всегда можно построить цикл, и он будет единственным. Направление построения цикла (по часовой стрелке или против) несущественно.
Шаг 5. В каждой клетке цикла, начиная с незаполненной, проставляются поочередно знаки «+» и «-» (обычно они ставятся в правом нижнем углу клетки). В клетках со знаком «-» выбирается минимальная величина. Новый базисный план получается путем сложения выбранной величины с величинами, стоящими в клетках цикла со знаком «+», и вычитания этой величины из величин, стоящих в клетках со знаком «-».
Выбранная минимальная величина будет соответствовать переменной, выводимой из базиса. Если таких величин более одной, то из базиса выводится любая из соответствующих им переменных.
Значения переменных, включенных в цикл, после описанной корректировки переносятся в новую таблицу. Все остальные переменные записываются в новую таблицу без изменений.
Осуществляется переход к шагу 1.
Замечание. Метод потенциалов обеспечивает монотонное убывание значений целевой функции и позволяет за конечное число шагов найти её минимум.
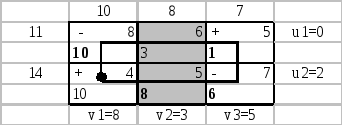
Пример 3.3. Решение транспортной задачи методом потенциалов. Определим оптимальный план задачи, исходные данные которой сведены в табл. 3.2. При этом будем отталкиваться от исходного плана, найденного методом северо-западного угла (см. табл. 3.3).
Таблица 3.5

Первой строке
табл. 3.5 поставим в соответствие потенциал
![]() ,
второй – потенциал
,
второй – потенциал![]() ,
а столбцам соответственно потенциалы
,
а столбцам соответственно потенциалы![]() .
Для каждой заполненной клетки на
основании формулы (3.17) построим
соотношения, определим значения
потенциалов и запишем их в табл. 3.5 справа
и снизу против соответствующих строк
и столбцов:
.
Для каждой заполненной клетки на
основании формулы (3.17) построим
соотношения, определим значения
потенциалов и запишем их в табл. 3.5 справа
и снизу против соответствующих строк
и столбцов:

Для каждой незаполненной клетки по формуле (3.18) рассчитаем косвенные тарифы и занесем их в левый нижний угол соответствующий незаполненной клетки табл. 3.5:
Проверяем полученный план на оптимальность по формуле (3.19):
8 – 5 = 3 0, 7 – 4 = 3 0.
Критерий оптимальности
плана транспортной задачи нарушается
в обеих незаполненных клетках. В общем
случае необходимо переходить к новому
базисному плану путем перемещения
перевозки в клетку, отвечающую максимальной
положительной разности (![]() ).
На данной итерации таких клеток две
(клетки, отвечающие переменным
).
На данной итерации таких клеток две
(клетки, отвечающие переменным
![]() и
и![]() ).
Поэтому будем перемещать перевозку в
первую по порядку клетку, то есть клетку,
отвечающую переменной
).
Поэтому будем перемещать перевозку в
первую по порядку клетку, то есть клетку,
отвечающую переменной![]() .
Отметим эту клетку в табл. 3.3.1.
.
Отметим эту клетку в табл. 3.3.1.
Для правильного перемещения перевозок строится цикл. Вычеркнем в табл. 3.3.1 первый столбец, который содержит одну заполненную клетку. Оставшиеся четыре заполненные клетки образуют цикл (клетка, в которую перемещается перевозка, считается заполненной).
В каждой клетке
цикла, начиная с клетки, отвечающей
переменной
![]() ,
проставим поочередно знаки «+» и «-». В
клетках со знаком «-» выберем минимальную
величину. В данном случае эта величина
равна 1. Новый базисный план отражен в
табл. 3.6. Значение переменной
,
проставим поочередно знаки «+» и «-». В
клетках со знаком «-» выберем минимальную
величину. В данном случае эта величина
равна 1. Новый базисный план отражен в
табл. 3.6. Значение переменной![]() ,
не включенной в цикл, переносится без
изменений. Переменные, включенные в
цикл, корректируются на выбранную
величину, которая равна 1, в зависимости
от знаков «+», и «-», стоящих в клетках
цикла.
,
не включенной в цикл, переносится без
изменений. Переменные, включенные в
цикл, корректируются на выбранную
величину, которая равна 1, в зависимости
от знаков «+», и «-», стоящих в клетках
цикла.
Таблица 3.6
Полученный в табл. 3.6 новый базисный план прежде всего необходимо проверить на вырожденность.
План невырожденный.
Значение базисных переменных: ![]()
Транспортные расходы:
![]()
Переходим к шагу 1. Дальнейшее решение задачи приведено в табл. 3.6-3.8. На каждой итерации необходимо осуществить проверку плана на вырожденность и шаги 1-5 алгоритма. На последней итерации, когда получен оптимальный план, последним является шаг 3 алгоритма.
В табл. 3.8 получен оптимальный план задачи, так как для каждой незаполненной клетки выполняется критерий оптимальности плана транспортной задачи:
5 – 8 = -3 0,
4 – 7 = -3 0.
Значение базисных
переменных в оптимальном плане: ![]() .
Транспортные расходы:
.
Транспортные расходы:
![]() .
.
Исходный план, полученный методом минимального элемента (табл. 3.4), будет оптимальным.
Таблица 3.7

Таблица 3.8

Пример 3.4.Решить заданную транспортную задачу методом потенциалов. Для построения исходного плана использовать следующие методы:
Метод северо-западного угла;
Метод минимального элемента.
Таблица 3.9
|
Всего |
99 |
97 |
95 |
95 |
95 |
|
|
96 |
16 |
15 |
14 |
15 |
6 |
А1 |
|
|
|
|
|
|
|
|
|
97 |
8 |
11 |
6 |
8 |
8 |
А2 |
|
|
|
|
|
|
|
|
|
99 |
12 |
7 |
9 |
13 |
8 |
А3 |
|
|
|
|
|
|
|
|
|
189 |
10 |
8 |
4 |
3 |
8 |
А4 |
|
|
|
|
|
|
|
|
|
|
В1 |
В2 |
В3 |
В4 |
В4 |
|
Метод северо-западного угла.
Таблица 3.10

Транспортные расходы:
![]()
Метод минимального элемента
Таблица 3.11

Транспортные расходы:
![]()
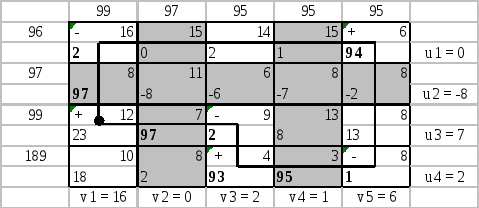
Метод потенциалов(для оптимизации исходного плана, полученного методом северо-западного угла)
Таблица 3.12



Косвенные тарифы для незаполненных клеток:


![]()

Значение целевой функции на данном этапе:
![]()
П роверка
на оптимальность:
роверка
на оптимальность:
Полученный план не является оптимальным. Минимальное количество единиц груза из клеток, отмеченных знаком «-»: 1. Перейдем к следующей таблице.
Таблица 3.13



Косвенные тарифы для незаполненных клеток:


Значение целевой функции на данном этапе:
![]()
П роверка
на оптимальность:
роверка
на оптимальность:
Полученный план не является оптимальным. Минимальное количество единиц груза из клеток, отмеченных знаком «-»: 93. Перейдем к следующей таблице.
Таблица 3.14


Косвенные тарифы для незаполненных клеток:



![]()
Значение целевой функции на данном этапе:
![]()
П роверка
на оптимальность:
роверка
на оптимальность:
Полученный план не является оптимальным. Минимальное количество единиц груза из клеток, отмеченных знаком «-»:1. Перейдем к следующей таблице.
Таблица 3.15



Косвенные тарифы для незаполненных клеток:


![]()

П роверка
на оптимальность:
роверка
на оптимальность:
Полученный план является оптимальным.
Транспортные расходы:
![]()
Метод потенциалов(для оптимизации исходного плана, полученного методом минимального элемента).
Таблица 3.16



Косвенные тарифы для незаполненных клеток:

![]()

П роверка
на оптимальность:
роверка
на оптимальность:
Полученный план не является оптимальным. Минимальное количество единиц груза из клеток, отмеченных знаком «-»:1. Перейдем к следующей таблице.
Таблица 3.17



Косвенные тарифы для незаполненных клеток:

![]()

Проверка на оптимальность:

Полученный план является оптимальным.
Транспортные расходы:
![]()