

ЦСАУ (ЦСАУЛР-1Вар-12)
.docТомский межвузовский центр дистанционного образования
Томский государственный университет
систем управления и радиоэлектроники (ТУСУР)
Кафедра компьютерных систем в управлении и проектировании (КСУП)
Лабораторная работа № 1
по дисциплине «Цифровые системы автоматического управления »
(Учебное пособие «Цифровые системы автоматического управления»,
автор А.Г. Карпов, 2004 г. )
Выполнил:
студент ТМЦДО
гр.: з-517-а
специальности 220201
Пономарев Сергей Сергеевич
29 сентября 2008 г.
г. Омск
2008 г
Лабораторная работа № 1
Цель лабораторной работы – освоить на практике методы получения и анализа уравнений состояния цифровой системы автоматического управления.
Исходные данные:
Задана импульсная передаточная функция замкнутой системы
-
№ варианта
W(z)
12

Необходимо:
1. Построить диаграммы состояния с помощью трех методов декомпозиции:
а) непосредственной,
б) последовательной,
в) параллельной.
2. Составить уравнения состояния и уравнения выхода на основе диаграмм состояния
![]()
Для каждого из методов п.1 результат представить в виде квадратной матрицы А, вектор-столбца В и вектор-строки С.
3. Решить уравнения состояния и уравнения выхода. Для этого:
а) вычислить переходную матрицу Ф(k),
б) записать решение уравнения в форме
![]()
Переходная матрица Ф(k) вычисляется для уравнений состояния, полученных
-
непосредственной декомпозицией – с помощью метода z-преобразования;
-
последовательной декомпозицией – с применением теоремы Кэли-Гамильтона;
-
параллельной декомпозицией – как диагональная матрица.
Подстановка решения x(k) дает решение для выходного сигнала системы
![]()
Решение необходимо записать для k=3 для заданных r(k) и нулевых начальных условий (y(0) = y(1) = 0). Для записи решения требуется пересчитать начальные условия для y(k) в начальные условия для x(k).
Решение:
1. Построение диаграмм состояния
Непосредственная декомпозиция
При непосредственной декомпозиции удобнее передаточную функцию представить в виде отношения полиномов по степеням z –1:
![]()
где Y(z) и R(z) – z-изображения выходного и входного сигнала соответственно.
Преобразуем передаточную функцию к виду отношения полиномов по степеням z–1, разделив числитель и знаменатель на z2:
![]()
Умножив числитель и знаменатель передаточной функции на вспомогательную переменную X(z), получим:
![]()
По последним уравнениям рисуем диаграмму состояния системы.

 1
1
R (z)
1 X(z)
z1
z1
0,4 Y(z)
(z)
1 X(z)
z1
z1
0,4 Y(z)










r(kT) x2((k+1)T) –0,3 x2(kT)=x1((k+1)T) x1(kT)
0,54
Переменные состояния вводим после каждого ребра с весом z–1. По полученной диаграмме записываем уравнения состояния и уравнение выхода, не учитывая ребер с весом z–1:
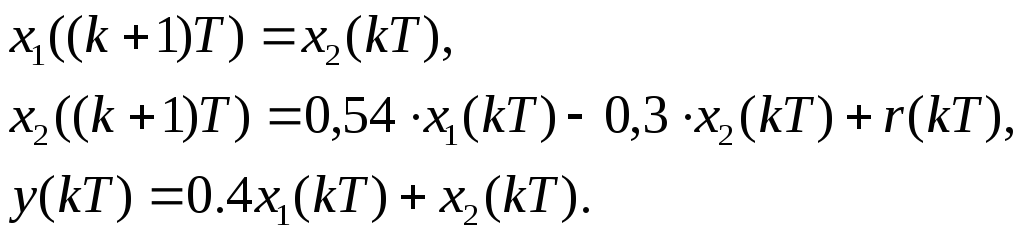
Из уравнений состояния и уравнения выхода видно, что соответствующие матрицы равны:
![]()
Непосредственная декомпозиция всегда приводит к уравнениям состояния системы в стандартной форме, или, как ее еще называют, к канонической форме фазовой переменной.
Параллельная декомпозиция
Параллельная декомпозиция предполагает разложение импульсной передаточной функции на простые дроби.
Представим передаточную функцию в виде суммы простых дробей, используя обычные правила разложения на простые дроби:

Диаграмма состояния, соответствующая этой передаточной функции, имеет следующий вид.
z1 x1(kT)
x




 1((k+1)T)
1((k+1)T)
 0,6
0,6
r(kT) 0,666 1



 y(kT)
y(kT)
0 ,333
z1
1
,333
z1
1
x


 2((k+1)T)
x2(kT)
2((k+1)T)
x2(kT)
–0,9
Вводя переменные состояния после каждого ребра с весом z–1, составим уравнения состояния и уравнение выхода:
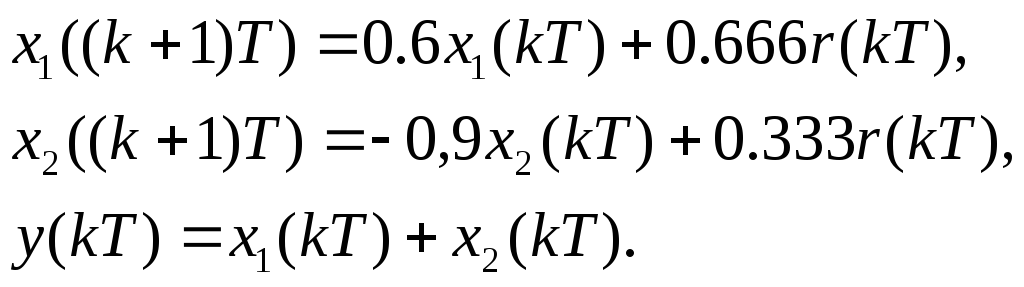
Соответствующие матрицы в привычных обозначениях будут равны:
![]()
При параллельной декомпозиции каждая компонента вектора состояния xk зависит только от самой себя в предшествующий момент времени, и матрица А имеет диагональный вид со своими характеристическими числами на главной диагонали. Таким образом, уравнения состояния представляются в нормальной (канонической) форме.
Последовательная декомпозиция
Последовательную декомпозицию лучше всего использовать для действительных полюсов и нулей импульсной передаточной функции. В этом случае представим W(z) в виде:
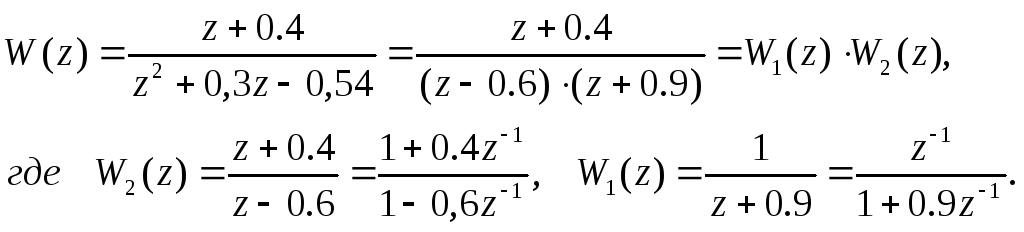
Составляем диаграмму состояния в виде последовательно соединенных цепочек.
1


r(kT) x2((k+1)T) z1 x2(kT) x1((k+1)T) z1 x1(kT) y(kT)














1 0,4 1
0,6 -0,9
По диаграмме состояния записываем уравнения состояния и уравнение выхода:
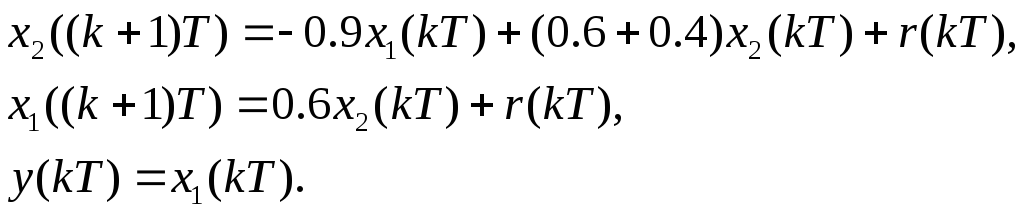
Окончательно матрицы в уравнениях системы будут иметь вид:
![]()
3. Решение уравнений состояния и уравнений выхода.
3.1. Вычисление переходной матрицы Ф(k)
3.1.1. Для уравнений состояния, полученных непосредственной декомпозицией переходная матрица вычисляется с помощью метода z-преобразования.
Найдем переходную матрицу для матрицы
![]()
![]()
методом
z-преобразования. Для этого воспользуемся
формулой
![]() .
.
Вначале запишем матрицу (zE–A):
![]() .
.
Далее найдем обратную матрицу:
![]() .
.
Умножая последнее выражение на z и проводя небольшие преобразования, получаем:

Осталось взять обратное z-преобразование от каждого элемента последней матрицы, предварительно представив эти элементы в виде суммы простых дробей. Имеем:
![]()
![]()
![]()
![]()
Таким образом, получили следующую переходную матрицу

Перейдем к решению уравнений
![]()
при
![]()
Считаем, что входное воздействие – единичная ступенька
![]()
Решение уравнения записывают в форме
![]()
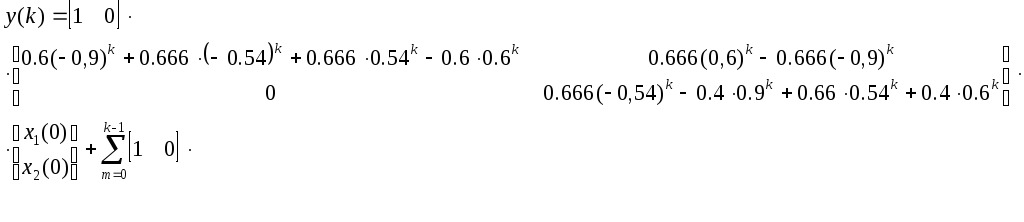
Подстановка решения x(k) дает решение для выходного сигнала системы
![]()
Запишем решение для k=3 заданных r(k) и нулевых начальных условий (y(0) = y(1) = 0). Для записи решения требуется пересчитать начальные условия для y(k) в начальные условия для x(k).
Имеем

Подставляя в последнюю формулу k=0, получаем:

Полагая k=1, имеем:
![]()
Учитывая начальные
условия для выхода y(k),
получим начальные условия для вектора
состояния x(k):
![]() Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим
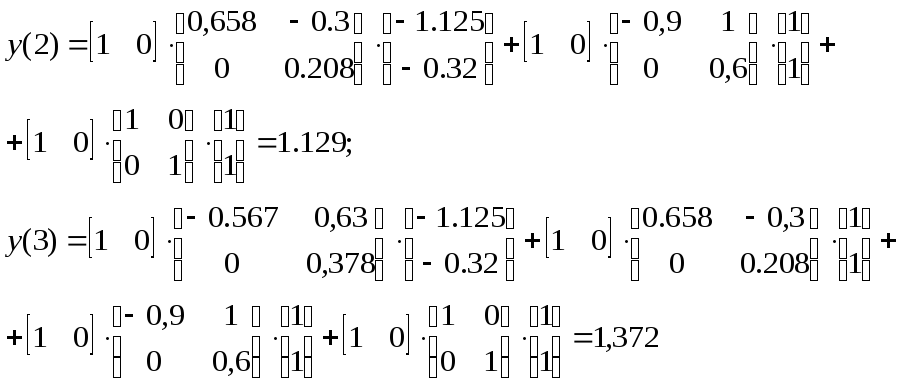
Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим

3.1.2. Для уравнений состояния, полученных последовательной декомпозицией переходная матрица вычисляется с применением теоремы Кэли-Гамильтона.
Найдем переходную матрицу для матрицы
![]()
методом Кэли-Гамильтона.
Поскольку матрица
А имеет
размерность
(22),
переходную матрицу можно представить
как матричный полином первого порядка
![]() ,
где коэффициенты
,
где коэффициенты
![]() определяются из системы уравнений
определяются из системы уравнений
![]()
где 1, 2 – собственные числа матрицы А.
Определяем собственные значения матрицы А, для чего составляем характеристическое уравнение:
![]() .
.
Корни характеристического уравнения (собственные числа) равны 1= –0,9; 2= 0,6. Подставляя данные в систему уравнений, получим
![]()
Вычитая из первого уравнения второе, найдем 1, а вычитая из первого уравнения удвоенное второе, определим 0:
![]() .
.
Осталось подставить найденные коэффициенты в выражение для переходной матрицы:
 Перейдем
к решению уравнений
Перейдем
к решению уравнений
![]()
при
![]()
Считаем, что входное воздействие – единичная ступенька
![]()
Решение уравнения записывают в форме
![]()
Подстановка решения x(k) дает решение для выходного сигнала системы
![]()
Запишем решение для k=3 заданных r(k) и нулевых начальных условий (y(0) = y(1) = 0). Для записи решения требуется пересчитать начальные условия для y(k) в начальные условия для x(k).
Имеем

Подставляя в последнюю формулу k=0, получаем:
![]()
Полагая k=1, имеем:
![]()
Учитывая начальные
условия для выхода y(k),
получим начальные условия для вектора
состояния x(k):
![]() Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим
Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим
3.1.3. Для уравнений состояния, полученных параллельной декомпозицией переходная матрица вычисляется как диагональная матрица.
Составим модальную матрицу, предварительно определив собственные значения и собственные векторы матрицы
![]()
Составляем характеристическое уравнение:
![]() .
.
Корни характеристического уравнения (собственные числа) равны
1= 0,6, 2= -0,9. Собственные векторы найдем как любой ненулевой столбец присоединенной матрицы
![]() при 1=
0,6, 2=
-0,9:
при 1=
0,6, 2=
-0,9:
![]() ,
,
![]()
Таким образом, модальная матрица будет иметь вид:
![]() .
.
Обратная к модальной матрица будет
![]() .
.
Теперь запишем переходную матрицу

Перейдем к решению уравнений
![]()
при
![]()
Считаем, что входное воздействие – единичная ступенька
![]()
Решение уравнения записывают в форме
![]()
Подстановка решения x(k) дает решение для выходного сигнала системы
![]()
Запишем решение для k=3 заданных r(k) и нулевых начальных условий (y(0) = y(1) = 0). Для записи решения требуется пересчитать начальные условия для y(k) в начальные условия для x(k).
Имеем
 Подставляя
в последнюю формулу k=0,
получаем:
Подставляя
в последнюю формулу k=0,
получаем:

Полагая k=1, имеем:

Учитывая начальные
условия для выхода y(k),
получим начальные условия для вектора
состояния x(k):
![]() Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим
Для того
чтобы получить значения выхода в
произвольный момент времени, необходимо
подставить конкретное значение k
и найденное значение x(0)
в выражение для выходного сигнала. Для
k=2,
3 получим
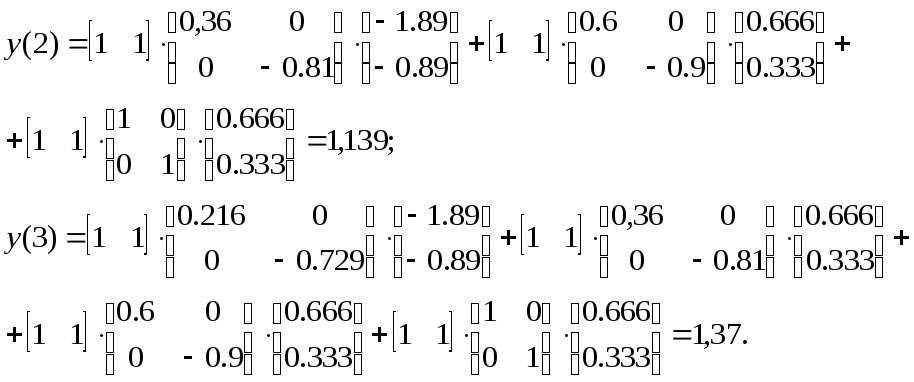
Результаты при вычислениях всеми тремя методами практически совпадают (есть небольшие различия, что можно объяснить округлением), что подтверждает их правильность.