

10.Построение механических характеристик
10.1 Естественная М.Х.
Обозначена на рис.3 и 4 буквой е
В
начале координат имеем
 =
1 ,при номинальной нагрузкеМн=
I=1получим
=
1 ,при номинальной нагрузкеМн=
I=1получим
 .
.
Таким
образом, естественная М.Х. проходит
через точку на оси ординат
 =
1 с наклоном
=
1 с наклоном =1-0,87=0,13
приМн=1
=1-0,87=0,13
приМн=1
10.2 Характеристики реостатного пуска
Построены па рис.3 справа от оси ординат.
Проводятся вертикали при значениях, соответствующих кратностям токов пуска и включения


Точка
f
на
оси
абсцисс и 1 на оси ординат соединяем
прямой. Пересечение этой прямой с
вертикалью
 =
1,52 дает точкуа
,
из которой проводится горизонталь до
пересечения с вертикалью
=
1,52 дает точкуа
,
из которой проводится горизонталь до
пересечения с вертикалью
 ,точкаа’
.Соединение
точек а’
и
1
дает
следующую реостатную характеристику,
пересечение которой с вертикалью
,точкаа’
.Соединение
точек а’
и
1
дает
следующую реостатную характеристику,
пересечение которой с вертикалью
 дает точкуb
.Горизонталь из точки b
при
пересечении с вертикалью
дает точкуb
.Горизонталь из точки b
при
пересечении с вертикалью
 дает точкуb’.
Реостатная
характеристика 1-
b’
при
пересечении с вертикалью
дает точкуb’.
Реостатная
характеристика 1-
b’
при
пересечении с вертикалью
 в точкес
дает
возможность проверить правильность
построения реостатных характеристик.
в точкес
дает
возможность проверить правильность
построения реостатных характеристик.
Каждая характеристика реостатного пуска имеет свое сопротивление
Rn1= Rn +Rя = 1, 92 +0, 9 =2, 82 Ом
Rn2= Rn1-R2 = 2, 82 -1,287 =1, 53 Ом
Для проверки получаемых графических значений скорости в точках a, b определим их расчетно. При этом используем свойства реостатных механических характеристик.
 =
1-
=
1- ·
· =
=
 =
1-
=
1- ·
· =
=
 Ом
Ом
Графически
полученные значения
 ,
, отличаются от расчетных не более чем
на 5 %.
отличаются от расчетных не более чем
на 5 %.
По данным значений скорости на рис.4 для реостатных характеристик при Мн=1
Можно
сделать вывод, что ступени пускового
реостата обеспечивают небольшой диапазон
регулирования скорости. Минимальное
ее значение при полностью введенном
реостате (характеристика с Rn1)
равно 0,6 ,
что меньше номинальной скорости всего
лишь в 1,5 раза.
,
что меньше номинальной скорости всего
лишь в 1,5 раза.
Для получения большего диапазона потребуется включения дополнительного сопротивления.
Пуск двигателя при номинальной нагрузке в одну ступень не допускается, так как включение всего пускового реостата сразу приведет к недопустимому броску тока. Это очевидно, если из точки b’’ провести горизонталь до пересечения с естественной М.Х.
10.3 Механические характеристики тормозных режимов: динамического и противовключения.
Показаны на рис.4
Характеристика динамического торможения ДТ при максимальном сопротивлении
R =Rn
является прямой линией, проведенной
через координаты точки d
=Rn
является прямой линией, проведенной
через координаты точки d
( =1,
-М
=1,
-М =
=
 )
и 0
)
и 0
Характеристика
противовключения ПК проходит через
точку d
( =1,-
Мпк
=
=1,-
Мпк
=  )
и
)
и
-Мпко
= 0,5 при =0
при =0
Сопротивление в цепи якоря, обеспечивающие эти характеристики, имеют значения
Для
ДТ: R =Rn+Rя
=2, 82 Ом
=Rn+Rя
=2, 82 Ом
Для
ПК: R =2Rn+Rя
= 2·1, 92 +0, 9 = 4, 74 Ом
=2Rn+Rя
= 2·1, 92 +0, 9 = 4, 74 Ом
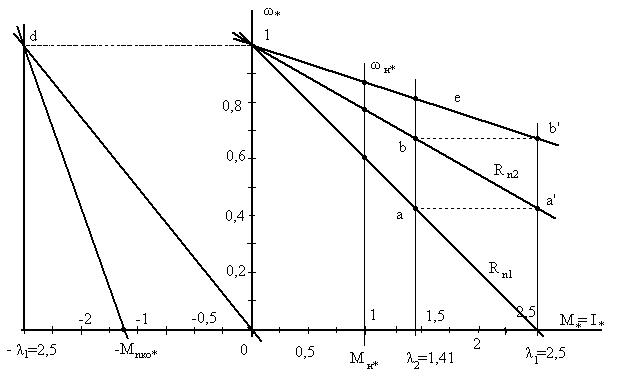
Рис.3.
10.4 Механические характеристики, обеспечивающие при номинальном токе нагрузки
уменьшение скорости двигателя в 4 раза.
Результаты
построений показаны на рис.4.
Точками для проведения прямых линий
искусственных М.Х. являются на оси
ординат
 и
и на вертикалиМн=1(точка
А)
на вертикалиМн=1(точка
А)
 =
= =
90,16р/с
=
90,16р/с
 =
39,31 р/с
=
39,31 р/с
 =
31,14 р/с
=
31,14 р/с
 =125,23
р/с
=125,23
р/с
В относительных значениях получаем
 =
= =1
=1

 =
Кш
=0,436
=
Кш
=0,436
Относительная скорость в точке А

10.5 Механические характеристики с ослабленным магнитным потоком Ф=0,72
Строится
по точкам
 приМ=0
(ось ординат) и
приМ=0
(ось ординат) и  приМ=Мн=1(точка
В на
приМ=Мн=1(точка
В на
рис.4).
Рассчитаем требуемые значения относительных скоростей:

 =
=
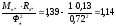

Построенная М.Х. показана на рис.4 с номером 1
рис.4.
11. Потери мощности и КПД двигателя на искусственных М.Х. с параметрами,
установленными в разделах 7 и 8. Эти характеристики показаны на рис.4.
Номинальные данные исследуемого двигателя:
Рн
= 1,1
кВт
,
 =
0,64, Iн
= 15,6 А
,
=
0,64, Iн
= 15,6 А
,  =
78,54p/c,
Rя
= 0,9 Ом,
с=
1,22 Вс,
Мн=Iн·с
=
19,03 p/c.
=
78,54p/c,
Rя
= 0,9 Ом,
с=
1,22 Вс,
Мн=Iн·с
=
19,03 p/c.
По условиям контрольной Мс =Мнв =14 Нм
11.1 Номинальные потери на естественной М.Х.
Полные:
 Вт.
Вт.
Переменные:
Рнпер
= I ·Rя
=15,6
·Rя
=15,6 ·0,9
= 219Вт
·0,9
= 219Вт
Постоянные:
Рнпос =Рн - Рнпер =619 – 219 = 400 Вт
11.2 Потери мощности и КПД на М.Х. с пониженным напряжением якоря
U
= 38 В,
Ф=
1, Rn
= 0, Rш
=,  = 0, 25
= 0, 25 ,Мс
= Мнв,
Рс
= Мс·
,Мс
= Мнв,
Рс
= Мс· =0,25Рн
=0,25Рн
Характеристика показана на рис.4 с номером 2
Согласно исходным данным, получаем
Рuпер =Рнпер = 219 Вт
Рuпос
=Рнпос·
 =
400·0,25
=
400·0,25 =
25Вт
=
25Вт
Как видно, переменные составляющие потерь не зависят от напряжения, если нагрузка
не меняется.
Коэффициент полезного действия

Рс
= Мс· =0,25
Рн
=0,25·1,1·10
=0,25
Рн
=0,25·1,1·10 =
275Вт
=
275Вт
По результатам расчетов видно, что общие потери мощности при понижении напряжения уменьшились относительно номинальных за счет Рuпос, уменьшившихся пропорционально квадрату скорости. Однако, относительное значение отдаваемой к потребляемой мощности в виде КПД тоже уменьшилось до 0,53 против 0,64 (номинальный КПД), так как Pci=0,25Pн
11.3 Потери мощности и КПД на М.Х. с реостатом Rn (характеристика на рис.4 с номером 3)
Здесь
U=Uн,
Ф=
1, Rn
= 4,62
Ом,
Rш
= ,  = 0,25
= 0,25 ,Рс
= 275 Вт.
,Рс
= 275 Вт.
Рассчитываем необходимые показатели:
 Вт
Вт
 Вт
Вт

Переменные потери за счет потерь в резисторе Rn очень большие, почти в 5 раз выше отдаваемой мощности. Это обусловило низкий КПД, всего 0,17
11.4 Потери мощности и КПД на М.Х. реостатного регулирования с шунтированием якоря
при параметрах, рассчитанных в пункте 8.3
U=Uн
=110 В,
Ф
= 1, Rn
= 1, 47 Ом,
Rш
= 1, 14 Ом,
Кш
= 0,436,
 =0,
2
=0,
2 ,
,
Мn· =19,03·0,2·15,71=
299Вт
=19,03·0,2·15,71=
299Вт
Характеристика показана на рис.4 с номером 4
 Вт
Вт
Pшпос = Pnпос = Рuпос = 25 Вт
Переменные потери превышают полезную отдаваемую мощность в 472 /275= 1,7 раз

Очень большие потери и крайне низкий КПД, поэтому в достигнутом диапазоне номинальной скорости 1:4 можно работать только кратковременно.
11.5 Потери мощности и КПД двигателя на М.Х. с ослабленным потоком (характеристика 1 на рис.4)
Исходные данные рассчитаны в пункте 7:
U=Uн
=110В, Ф =
0, 72,
=
0, 72,  = 1, 4
= 1, 4 ,
Rn
= 0 Ом,
Rш
=,
Iс=
Iн.
,
Rn
= 0 Ом,
Rш
=,
Iс=
Iн.

Переменные потери не зависят от изменения потока, так же как при изменениях напряжения, если ток нагрузки остался неизменным. В нашем случае, когда Iс= Iн, имеем
Pфпер =Рнпер =219 Вт
При ослабленном потоке для обеспечения условия Iя= Iн = const необходимо уменьшить момент нагрузки Мс, соблюдая равенство
Мс=
Iн·с
· Ф
Иначе двигатель будет перегреваться.
Мс=Мн·
Ф =
Мн·0,72
=Рн
/
=
Мн·0,72
=Рн
/ ·0,72
·0,72
Развиваемая на валу мощность останется номинальной, так как момент уменьшился ровно во столько раз, во сколько увеличилась скорость.
Рс=Мн
/
1,4 · ·1,4
=Мн·
·1,4
=Мн· =Рн
=1,1
кВт
=Рн
=1,1
кВт
Постоянная составляющая потерь
 Вт
Вт
Величина КПД

Коэффициент полезного действия уменьшился относительно номинального значения 0,64 за счет увеличения постоянной составляющей потерь.
11.6 Заключение по расчетам КПД.
Потери мощности и величина КПД двигателя отличаются от номинальных паспортных значений во всех случаях, когда нагрузка и скорость становятся не номинальными. Изменения идут всегда в худшую сторону.
На показатель КПД прежде всего влияет величина отдаваемой полезной мощности. Чем меньше эта мощность, тем меньше коэффициент полезного действия, так как удельный вес потерь при этом возрастает.
При одинаковых значениях момента нагрузки и скорости, а следовательно и мощности на валу двигателя, наибольшие потери наблюдаются при реостатных способах регулирования.
Наибольшие потери мощности и наименьший КПД наблюдается при реостатном регулировании с дополнительном шунтированием якоря. Здесь КПД может составлять несколько процентов (в пункте 11.4 он равен 17%)
12.Диаграммы
переходных процессов М(t),
 (t)
для циклов работы двигателя:
(t)
для циклов работы двигателя:
а) пуск без нагрузки(в холостую), прием нагрузки, работа при номинальной нагрузке, сброс нагрузки, торможение противовключением до остановки.
в) пуск, работа, динамическое торможение в одну ступень до остановки- все при номинальной нагрузке.
12.1 Постоянные времени М.Х.
Для естественной характеристики:
 c
c
Для характеристик реостатного пуска:
 с
с
 с
с
Значения Rn1, Rn2 определены в пункте 10.2
Для тормозных режимов:
 c
c
 с
с
Значения
R и
Rnк
определены в разделах 3 и 4.
и
Rnк
определены в разделах 3 и 4.
12.2 Длительности ПП определяются по выражению
t =
Тмi·
ln
=
Тмi·
ln

Для холостого хода двигателя, работающего без нагрузки, ранее рассчитано
(пункты 1.5, 1.6)
Мхх = 5,03 Нм
Мхх*=0,26
Имеем:
М =
Мхх*=0,26
=
Мхх*=0,26
Определяем время разгона без нагрузки на первой ступени:
 с
с
Здесь и для других М.Х. реостатного пуска величина А одинакова:
А=
ln =ln
=ln =
ln
=
ln =
ln1,95=0,67
=
ln1,95=0,67
Время разгона на второй ступени пуска:
t =
Тм2·А=2,
68·0, 67=1, 8 с
=
Тм2·А=2,
68·0, 67=1, 8 с
Время завершения пуска на естественной М.Х. ,а также времена приема и сброса нагрузки:
t =
t
=
t =
t
=
t =
4·Tме
= 4·1, 56 = 6, 24 с
=
4·Tме
= 4·1, 56 = 6, 24 с
Время торможения противовключением:
t =
Тм
=
Тм · ln
· ln =
8, 3 · ln
=
8, 3 · ln =
8, 3· ln1,
83 = 8, 3·0, 603=5 с
=
8, 3· ln1,
83 = 8, 3·0, 603=5 с
Суммарное время пуска без нагрузки:
t =
t
=
t +
t
+
t +
t
+
t +
t
+
t =3,
13+1, 8+6, 24=11, 17 c
=3,
13+1, 8+6, 24=11, 17 c
12.3 Длительности ПП при номинальной нагрузке
Здесь
Мс=Мn
М =М
=М =1
=1
Рассчитанные в п.12.1. постоянные времени остаются прежними, так как нагрузка на
них не влияет. Длительность ПП определяется по выражению:
t =Тмi·
ln
=Тмi·
ln

Времена разгона под нагрузкой на каждой ступени пуска:
А1=
ln =ln
=ln =
ln
=
ln =
ln 3,66 =1,3
=
ln 3,66 =1,3
t = Тм1·А1=
4, 69·1, 3 = 6, 08 с
= Тм1·А1=
4, 69·1, 3 = 6, 08 с
t =
Тм2·А1=
2, 68·1, 3 = 3, 48 с
=
Тм2·А1=
2, 68·1, 3 = 3, 48 с
t =
4·Tме
= 4·1, 57 = 6, 24 с
=
4·Tме
= 4·1, 57 = 6, 24 с
Суммарное время пуска под нагрузкой:
t =
6, 08+3, 48+6, 24 = 15, 8 с
=
6, 08+3, 48+6, 24 = 15, 8 с
Время динамического торможения в одну ступень:
t = Тм
= Тм ·ln
·ln = 3, 36· ln
= 3, 36· ln =3,
36· ln3,
5 =8, 14·1, 25 4, 2 с
=3,
36· ln3,
5 =8, 14·1, 25 4, 2 с
12.4 Длительность циклограмм для выбора масштаба времени:
Для циклограммы пуска и торможения под нагрузкой:
t =(
t
=(
t +
t
+
t + t
+ t +
t
+
t )·1,2
=(11,7+6,24+6,24+5) · 1,234,4 c
)·1,2
=(11,7+6,24+6,24+5) · 1,234,4 c
Для циклограммы пуска и торможения под нагрузкой:
t =
(t
=
(t +t
+t )
·1,
2 = (15, 8+4, 2) ·1, 2 = 24 с
)
·1,
2 = (15, 8+4, 2) ·1, 2 = 24 с
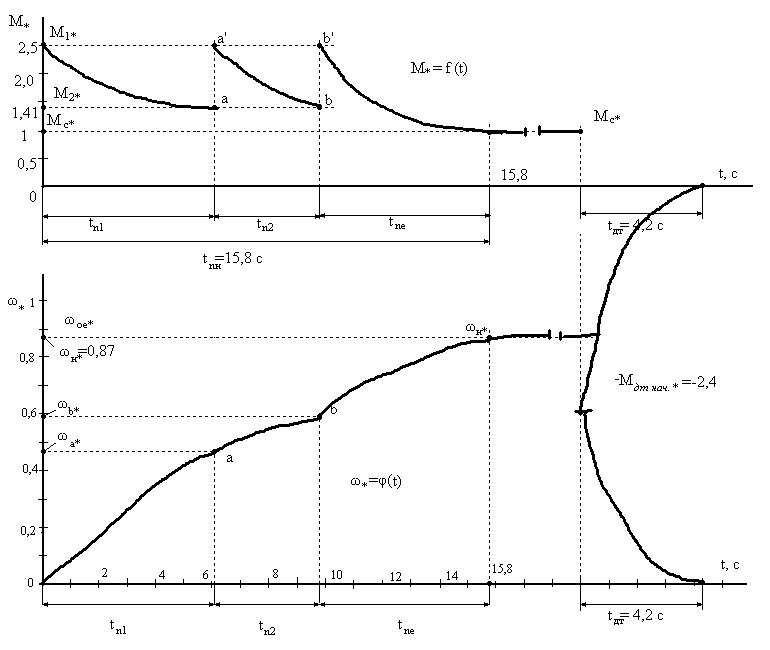
Рис.5.
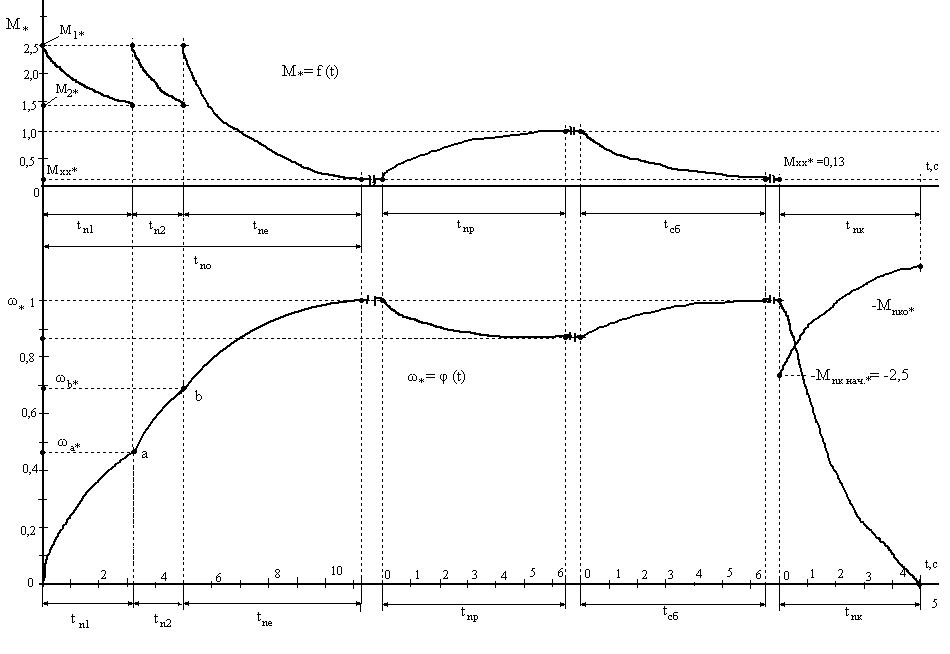
Рис.6.
Выводы
1. Линейность механических характеристик ДПТ НВ обеспечивает быстрое их графическое изображение по двум точкам.
Диапазон 1:4 достигается лишь при понижении напряжения якоря, и при реостатном регулировании с дополнительным шунтированием якоря. Во втором случае КПД двигателя становится крайне низким, всего 10%.
2.
Для
ограничения пускового тока с требуемой
кратностью
 =2,5
от номинального требуется ввести в цепь
якоря последовательное сопротивление
1,92 Ом,
что в 2,1 раза больше сопротивления якоря
с соответствующим увеличением потерь
мощности при пуске. Такое же ограничение
тока можно обеспечить понижением
напряжения якоря до 38 В,
то есть уменьшить его в 2,9 раза от
номинального значения. При этом
дополнительных потерь мощности не
происходит, но требуется специальный
регулятор напряжения.
=2,5
от номинального требуется ввести в цепь
якоря последовательное сопротивление
1,92 Ом,
что в 2,1 раза больше сопротивления якоря
с соответствующим увеличением потерь
мощности при пуске. Такое же ограничение
тока можно обеспечить понижением
напряжения якоря до 38 В,
то есть уменьшить его в 2,9 раза от
номинального значения. При этом
дополнительных потерь мощности не
происходит, но требуется специальный
регулятор напряжения.
3. Пуск двигателя в одну ступень при номинальной нагрузке невозможен, так как при выключении пускового реостата бросок тока превысит допустимое значение.
4. Реостатное регулирование скорости приводит к большим потерям мощности, превышающие полезную мощность на валу двигателя. Поэтому такое регулирование должно быть непродолжительным.
5. Повышение скорости вверх от номинальной за счет уменьшения магнитного потока возможно лишь при моментах нагрузки, меньших номинального значения
6. При резком снижении напряжения якоря или увеличения потока возбуждения двигатель переходит в генераторный режим с броском тормозного момента, который может быть недопустимым. Для двигателя с паспортными данными в контрольной работе скачки напряжения якоря не должны превышать 32% его номинального значения.