

Д6590 Данин ВБ Автоматизированные комплексы
.pdfРассмотренные переходные характеристики соответствуют динамическим характеристикам типового интегрирующего звена [1].
Анализ требований к качеству регулирования
Для выбора оптимальных параметров настройки САР необходимо определить номинальное численное значение регулируемого параметра hnom, м соответствующее начальному равновесному состоянию объекта, от которого будет производиться отсчет отклонений всех переменных. Принимаем за такое значение среднее значение допустимого диапазона варьирования уровня в баке-дозаторе hnom = 0,5(hw – hl), м.
Значения hw, м и hl, м выбирают с учетом некоторой зоны ава-
рийной защиты, например, hw = hmax – 0,1hmax (от переполнения) и hl = = hmin + 0,1hmax (от полного опорожнения) бака.
Отклонения уровня жидкости в емкости дозатора при любых изменениях производственных ситуаций на предприятии устраняются САР. Уровень должен поддерживаться с минимальной статической ошибкой вблизи заданного значения hp = hnom, м.
Необходимо, не только минимизировать статическую ошибку (например, вводом интегральной составляющей в закон регулирования), но и ограничить амплитуду и продолжительность отклонения регулируемой величины h от номинала в переходном процессе, в динамике, например, настройкой регулятора на переходной процесс с минимальной интегральной ошибкой.
Оценить допустимую статическую и динамическую погрешность стабилизации уровня в баке можно исходя из допустимой по технологическим условиям погрешности дозировки δg2, например, δg2 = 0,02g2nom. Погрешность стабилизации уровня воды в баке, определяется разностью притока и оттока g = ·fb· h. Допустимую статическую погрешность стабилизации уровня можно оценить по формуле h = g/( ·fb).
При переходном процессе САР в виде затухающих положительных и отрицательных отклонений от уставки hp влияние динамических отклонений уровня на дозировку взаимно компенсируется. Поэтому допустимую величину кратковременного динамического заброса параметра (первая амплитуда колебаний A1 в переходном процессе) можно принять достаточно высокой, например, dh = 0,1hp и продолжительной, например, dτd = 80 с.
31

При работе дозатора может возникнуть необходимость измене-
ния уставки регулятору hp dhp = hnom, м, например, при переходе на другой дозируемый компонент. Такое вмешательство в работу САР
следует рассматривать как возмущение по каналу задания.
Анализ возмущающих воздействий
Основным возмущающим воздействием x является количество отбираемой из бака жидкости g2, кг/с. Данное возмущение может изменяться в широком диапазоне. Например, к дозировочному баку могут подключатся несколько потребителей, каждый из которых обеспечивает дозировку жидкости на свой агрегат. Включение и отклонение каждого агрегата определяется производственной ситуацией. Возможно также изменение настройки расхода через каждое дозирующее устройство при переходе на другой состав смеси, например, изменением проходного сечения дозатора fd.
Для установления диапазона варьирования количества отбираемой из бака жидкости определяют:
– диапазон варьирования потребления жидкости по каждому каналу:
g2min( ) < g2( ) < g2max( ),
где = 1…m, m – число дозирующих устройств подключенных к баку,
g2min( ), g2max( ), кг/с – минимальное и максимальное количество жидкости дозируемое -м дозатором.
– верхний предел варьирования суммарного возмущения:
|
m |
g2 max |
g2 max (φ) ; |
φ1
–нижний предел варьирования суммарного возмущения:
g2min = g2min( ),
где g2min( ) – наименьшее потребление по одному включѐнному дозатору (остальные дозаторы отключены).
Для оптимизационных расчетов САР принимаем численное значение возмущающего воздействия на номинальном режиме в середине диапазона варьирования:
g2nom =0,5(g2max – g2min).
32
Анализ канала управления объектом
Компенсация изменения уровня h, м от воздействия возмущения g2, кг/с осуществляется изменением количества жидкости g1, кг/с подаваемой в бак из магистрали подачи gm. Для управления расходом g1 на объекте предусмотрен функциональный регулирующий клапан.
Команда управления закрытием клапана yp = 0…100 % (ХРО) обеспечивает изменение количества жидкости, поступающей в бак в
диапазоне g1 = g1max…0, кг/с, где g1max = gm расход из магистрали через клапан при полном его открытии (0 % ХРО). При выборе численного
значения g1max, необходимо анализировать режимы работы магистрали подачи дозируемой жидкости на вход клапана. В магистрали могут происходить изменения давления pm, например, за счет изменения уровня в емкости хранения, из которой жидкость поступает к регулирующему клапану. В этом случае, необходимо определить диапазоны
варьирования pmmin … pmmax и зависимость gmnom = km·pmnom.
Изменения диапазона pmmin … pmmax следует рассматривать как неуправляемое дополнительное возмущающее воздействие на объект.
Линейная зависимость расхода через клапан от величины его закрытия
g1 = gm(1 – 0,01yp).
В приращениях, изменение подачи жидкости в бак dg1 = kk·dyp,
где kk = g1/ yp = gm/100 – коэффициент передачи регулирующего клапана, (кг/с)/% ХРО.
На характеристики переходного процесса существенно влияет запаздывание z, при передаче команды управления yp[ ] сформированной САР каналу изменения подачи жидкости в бак-дозатор g1[ ].
Зависимость расхода через клапан от величины его закрытия с учѐтом запаздывания
g1[ ] = gm(1 – 0,01yp[ – z]).
Численное значение z может определяться, например, конструктивными характеристиками исполнительных устройств перемещения регулирующего клапана. Так, при выборе электродвигательного механизма постоянной скорости со временем полного хода от 0 до
33
100 % ХРО равном 200 с, при появлении команды yp =+10 % ХРО перемещение клапана в новое положение происходит за 20 с.
Для номинального статического режима работы объекта, принимаемого за начало отсчѐта всех отклонений, выбирают следующие настройки по каналу управления:
– величина закрытия клапана в первоначальном равновесном
режиме ypnom = 50 % ХРО;
– диапазон варьирования команды управления при работе регу-
лятора ypmin = 10 % ХРО, ypmax = 90 % ХРО;
– коэффициент передачи регулирующего клапана
kk = g1/ yp = gm/100 = 20/00 = 0,2, (кг/с)/% ХРО
– подача жидкости в бак-дозатор на номинальном режиме g1nom = g2nom = gm(1–0,01ypnom) = 0,5gm = 10, кг/с.
В табл. 3 дан пример оформления результатов параметрического анализа бака-дозатора с учетом изменения производственных ситуаций на объекте. Подача жидкости из магистрали к регулирующему клапану рассматривается как постоянная величина (pm = pmnom = const). Оборудование объекта обеспечивает при полностью открытом клапане (0 % ХРО) расход g1 = gm = 20 кг/с. Номинальный равновесный режим, с учѐтом линейной характеристики клапана, определяется значениями:
ypnom = 50 % ХРО, g1nom = g2nom = 10 кг / с.
34
|
|
|
Таблица 3 |
||
Параметрический анализ бака-дозатора |
|
|
|||
|
|
|
|
|
|
Обозначение |
Наименование |
Значение параметров |
|||
и размерность |
параметров |
nom |
min |
max |
|
|
Константы |
|
|
|
|
hb, м |
Высота бака |
4 |
|
|
|
fb, м2 |
Площадь бака |
0,4 |
|
|
|
, кг/м3 |
Плотность жидкости |
103 |
|
|
|
= kx = 1/(ρfb), м /кг |
Коэффициент передачи |
2,5·10–3 |
|
|
|
|
по каналу возмущения |
|
|
|
|
Уровень жидкости в баке |
|
|
|
||
hl = 0,1hb, м |
Нижний аварийный предел |
0,4 |
|
|
|
hw = hb – 0,1hb, м |
Верхний аварийный предел |
3,6 |
|
|
|
hnom = 0,5hb, м |
Номинальное значение |
2 |
|
|
|
h = g , м |
Допустимая статическая ошиб- |
5·10–4 |
|
|
|
|
ка по уровню при g = 0,02gnom |
|
|
|
|
dh=0,1*hnom, м |
Допустимый заброс |
0,2 |
|
|
|
dτd, с |
Продолжительность |
80 |
|
|
|
|
Анализ возмущений X |
|
|
|
|
g2(1), кг/с |
Расход воды канал 1 |
1,0 |
2,0 |
4,0 |
|
g2(2), кг/с |
Расход воды канал 2 |
0 |
2,0 |
3,0 |
|
g2(3), кг/с |
Расход воды канал 3 |
2,0 |
3,0 |
4,0 |
|
g2(4), кг/с |
Расход воды канал 4 |
2,0 |
3,0 |
4,0 |
|
g2, кг/с |
Суммарный расход |
5,0 |
10,0 |
15,0 |
|
dg2, кг/с |
Возмущение |
–2 |
+2 |
||
|
|||||
hp, |
Уставка регулятору. |
1,5 |
2,0 |
2,5 |
|
dhp |
Возмущение |
– 0,5 |
|
+0,5 |
|
|
Анализ управляющих воздействий y |
|
|
||
|
Поступление воды в бак (yp = 0, |
|
|
|
|
gm, кг/с |
% ХРО) |
|
20 |
|
|
dgm, кг/с |
Возмущение |
–4 |
|
+4 |
|
yp, % ХРО |
Величина закрытия клапана при |
10 |
50 |
90 |
|
работе САР |
|
|
|
||
|
|
|
|
||
g1, кг/с |
Расход жидкости через клапан |
18,0 |
10,0 |
2,0 |
|
g1=gm(1–0,01yp) |
|
|
(g1nom |
|
|
|
|
|
=g2nom) |
|
|
kk=gm/100, |
Коэффициент передачи клапана |
|
0,2 |
|
|
(кг/с)/% ХРО |
|
|
|
|
|
=ky=kx*kk, |
Коэффициент передачи по ка- |
|
5·10–4 |
|
|
(м/с)/% ХРО |
налу управления |
|
|
|
|
z, с |
Запаздывание по каналу управ- |
|
20 |
|
|
ления |
|
|
|
||
|
|
|
|
||
35
СТРУКТУРНАЯ СХЕМА ФУНКЦИОНАЛЬНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Как отмечено выше, при создании САР сбалансированных астатических объектов следует выбрать функциональный закон регулирования, содержащий интегральную составляющую (ПИ, ПИД), который обеспечивает поддержание (стабилизацию) регулируемого параметра в статическом режиме вблизи уставки (hp, м) без статической ошибки. Необходимо также выбрать параметры настройки регулятора, которые обеспечат работоспособность системы при изменении производственных ситуаций, например, при изменении численных значений возмуща-
ющих воздействий в диапазоне варьирования g2min < g2[τ]<g2max, кг/с.
На рис. 8 представлена структурно-параметрическая схема контура САР, реализующая ПИД закон регулирования для сбалансированного астатического объекта.
Рис 8. Структурно-параметрическая схема функциональной САР
На этой схеме обозначены основные модули, образующие структуру САР, входные и выходные переменные контура и отдельных модулей, а также параметры настройки регулятора:
ОУ – объект управления:
z – переменная, формируемая на выходе объекта (регулируемый параметр);.
36
x – неуправляемое возмущающее воздействие на объект; y – управляемое воздействие на объект.
ИП – измерительный преобразователь (датчик):
z(i) – численное значение результата измерения регулируемого параметра.
ЗУ – задающее устройство:
zu – ввод задания (уставки) регулятору;
zp – численное значение уставки регулятору. СО – блок вычисления сигнала ошибки:
δz – численное значение сигнала ошибки. БУ – блок управления (регулятор).
Численные значения параметров настройки регулятора:
kp – коэффициент усиления или xp = 1/kp – полоса пропорциональности;
s, с – постоянная времени интегрирования;
p, с – постоянная времени дифференцирования;
yp – численное значение команды управления формируемой регулятором.
УУ – устройство изменения управляемого воздействия на объект (исполнительный механизм):
yl – численное значение команды управления формируемой исполнительным механизмом.
ИУ – исполняющее устройство (регулирующий клапан):
y – численное значение управляющего воздействия на объект. ymax – предельное значение управляющего воздействия.
При создании системы рассчитываются параметры настройки регулятора (kp, s, p), при которых будут обеспечены переходные процессы с симметричными колебаниями и минимальным динамическим забросом регулируемого параметра (например, процесс с минимальной интегральной ошибкой).
В программном обеспечении контроллеров, специализированных на реализацию ПИД-законов регулирования, предусмотрены драйверы для проведения автонастройки коэффициентов (kp, s, p) регулятора непосредственно на объекте (см. глоссарий каталога фирмы ОВЕН) [3].
При создании системы САР для нового объекта, предварительный выбор параметров настройки регулятора рекомендуется выпол-
37
нять с использованием графо-аналитичесуих методик [2]. Авторы методик указывают на необходимость последующей корректировки настройки исследованием переходных характеристик в замкнутом контуре САР на объекте или на модели системы.
СТРУКТУРА И МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ МОДЕЛИ СИСТЕМЫ ФУНКЦИОНАЛЬНОГО РЕГУЛИРОВАНИЯ
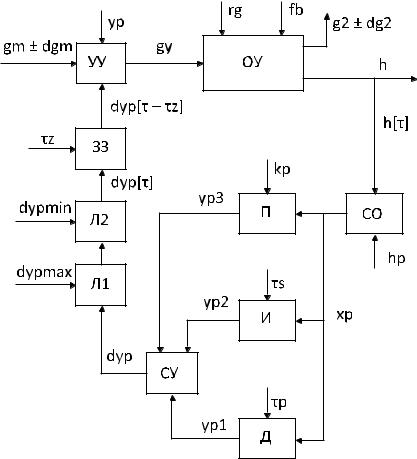
На рис. 9 структура САР преобразована в схему модели контура стабилизации уровня в баке-дозаторе.
Рис. 9. Структура модели контура стабилизации уровня в баке-дозаторе
38

Математическое описание звеньев модели
Звено ОУ (объект управления):
dh |
1 |
(gy – (g2 + dg2), |
|
|
|
|
|
d |
|
rg fb |
|
где h – уровень жидкости в баке, м; rg – плотность жидкости, кг/м3; fb – площадь сечения бака, м2; gy – расход жидкости через регулирующий клапан на входе в бак, кг/с; g2 – суммарный расход жидкости на выходе из бака, кг/с; dg2 – положительное или отрицательное отклонения от номинала расхода из бака (возмущение), кг/с;
Приращение уровня в баке за промежуток времени dτ (шаг интегрирования)
dh[dτ] = (1 / (rg·fb))·(gy – (g2 + dg2)·dτ
Изменение численного значения уровня в динамике
h[τ + dτ] = h[τ] + dh[dτ]
Звено СО – модуль вычисления сигнала ошибки:
xp*τ+ = h*τ+ – hp,
где xp[τ] – численное значение сигнала ошибки в момент времени τ, м; hp– уставка регулятору (настройка), м; h[τ] – численное значение уровня в баке в момент времени τ, м.
Звено П – модуль формирования пропорциональной составляющей при ПИД-регулировании:
yp3 = kp·xp[τ],
где yp3 – численное значение пропорциональной составляющей в суммарном управляющем воздействии, % ХРО; kp – численное значение коэффициента усиления ПИД-регулятора, % ХРО/м (может быть использовано также значение пределопропорциональности xp = 1/kp).
Звено И – модуль формирования интегральной составляющей ПИД-регулятора:
yp2=kp τ2 xp dτ
τs τ1
или
dyp2[dτ] = (kp·xp[τ]/τs)·dτ
39
yp2 = yp2[τ+dτ]=yp2[τ]+dyp2[dτ],
где dyp2[dτ] – приращение численного значения интегральной составляющей управляющего воздействия за интервал интегрирования dτ, % ХРО; τs – численное значение настройки постоянной времени звена интегрирования регулятора, с; yp2[τ+dτ], yp2[τ] – численное значение интегральной составляющей в суммарном управляющем воздействии в указанный момент времени, % ХРО.
Звено Д – модуль формирования дифференциальной составляющей при ПИД-регулировании:
yp1[τ]=kp·τp·xp[τ]/dτ,
где yp1[τ] – численное значение дифференциальной составляющей в суммарном управляющем воздействии в указанный момент времени, % ХРО; τp – численное значение настройки постоянной времени звена дифференцирования регулятора, с.
Звено СУ – модуль формирования суммарного управляющего воздействия при ПИД-регулировании:
dyp*τ+ = yp1*τ+ + yp2 + yp3,
где dyp[τ] – суммарное управляющее воздействие ПИД регулятора в момент времени τ, % ХРО.
Звено Л1 – логический модуль ограничения (ypmin = 90 % ХРО) хода регулирующего клапана в сторону закрытия и звено Л2 – логический модуль ограничения (ypmax = 10 %ХРО) хода регулирующего клапана в сторону открытия при ПИД-регулировании
IF (yp1*τ++yp2+yp3) ≥ 40 THEN dyp*τ+ = 40
ELSFIF (yp1*τ++yp2+yp3) ≤ –40 THEN dyp*τ+ = –40
ELSE dyp*τ+ = (yp1*τ++yp2+yp3)
END IF
Звено ЗЗ – задержка на τz с реализации управляющего воздействия на УУ:
yp[τ] = yp + (yp+dyp[τ – τz]),
где yp – численное значение величины закрытия клапана при начальном равновесном режиме, например, yp = 50 % ХРО; dyp[τ – τz], %
40